2 FEM Basics: Discretization 2.4 The Galerkin Basis...
3
Click here to load reader
Transcript of 2 FEM Basics: Discretization 2.4 The Galerkin Basis...

Lecture 2 4 Wed, 18/01/12
2 FEM Basics: Discretization
2.1 The weak form, again
Recall... we are interested in the following differential
equation: find u ∈ C[0, 1] ∪ C2(Ω) such that
−u ′′(x) + r(x)u(x) = f(x) for 0 < x < 1,
with u(0) = u(1) = 1. Here r and f are given functions.
We then derived the variational formulation: Define
• the inner product (u, v) :=∫
1
0u(x)v(x)dx;
• the bilinear form B(u, v) := (u ′, v ′) + (ru, v), and
• the linear form l(v) = (f, v).
Then, the weak/variational formulation of the differen-
tial equation is: Find u ∈ H1
0(0, 1) such that
B(u, v) = l(v) for all v ∈ H1
0(0, 1).
2.2 The minimisation problem
In some case, its very useful to rephrase problem (1.5)
as a minimisation problem. This can be done as follows:
Let F(v) = A(v, v)/2 − L(v). Then solving the prob-
lem:
find u ∈ V such that F(u) 6 F(v) for all v ∈ V,
is equivalent to solving the weak problem (1.5). We’ll
give a careful explanation of why this is true in a future
lecture.
2.3 On Infinite- and Finite-Dimensional
Spaces
We are familiar with finite dimensional spaces, such as
the space of vectors in R2, or R
n. And with much larger
spaces, such as the space of all continuous functions on
[0, 1]. This is an infinite dimensional space: we would
have to write down an infinite number of values to de-
scribe a member uniquely. The space H1
0(0, 1) that we
met earlier is even larger.
Example 2.1. The space of functions that are of the
form g(x) = γ(x − a)(x − b) for any γ ∈ R is finite-
dimensional (because it has dimension 1). But every
member of this space also belongs to the infinite dimen-
sional space H1
0(0, 1); it is a finite-dimensional subspace
of H1
0(0, 1).
2.4 The Galerkin Basis Functions
Example 2.2. To get another very important exam-
ple of a finite dimensional subspace of H1
0(0, 1), first fix
a “mesh” on [0, 1]. This is just a set of points a = x0 <
x1 < x2 < · · · < xn = b. Then consider the space of
all functions that are piecewise linear on this mesh and
that vanish at x = a and x = b.
This is a a finite-dimensional sub-space of H1
0(0, 1).
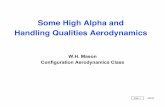
A reasonable basis for this space would be the hat func-
tions ψ1,ψ2, . . . ,ψn−1 given by
ψi(x) =
(x − xi−1)/h xi−1 6 x < xi
(xi+1 − x)/h xi 6 x 6 xi+1
0 otherwise.
where h = (b − a)/n is the distance between adjacent
points. Then we can write any function uh as
uh(x) = λ1ψ1(x) + λ2ψ2(x) + · · · + λn−1ψn−1(x).
This basis set, shown below, are often called hat
functions or Galerkin Basis functions.
x2x1a = x0
ψ2
x3
ψn−2
xn−3 xn−2 xn−1 xn = b
ψn−1ψ1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 The Discrete Variational Form
Recall that we reformulated our boundary value prob-
lem as: Find u ∈ H1
0(0, 1) such that
B(u, v) = l(v) for all v ∈ H1
0(0, 1).
Now imagine we were trying to solve it by taking a func-
tion from H1
0(0, 1) and checking if this integral equation
is true for all functions v in H1
0(0, 1). This would take
forever because there are an infinite number of candi-
dates. So instead we restrict our attention to a finite-
dimensional subspace S of H1
0(0, 1). Now we can select
a function uh from S and “put it on trial” by testing
it against (all) the functions vh in S. This leads to the
terminology of calling uh a trial function and vh a test
function.
Early methods due to Ritz, Galerkin and others use
specially chosen functions which could yield rather accu-
rate solutions, but typically where difficult to compute
with, and to generalise. Richard Currant proposed the
much simpler approach of using piecewise polynomials;

Lecture 2 5 Wed, 25/01/12
this led to the “finite element method” (a term coined
by Ray W. Clough in 1961).
Let S be the space of piecewise linear functions on
the mesh xi = ih, where h = 1/n. As above, uh can be
written as
uh(x) = λ1ψ1(x) + λ2ψ2(x) + · · · + λn−1ψn−1(x).
So uh has n − 1 unknowns: λ1, λ2, . . . , λn. To generate
n − 1 equations, we’ll test uh against the n − 1 hat
functions ψ1,ψ2, . . . ,ψn. Thus we have n−1 equations
in n − 1 unknowns to solve.
Definition 2.1 (The Finite Element Method). Let S be
the finite dimensional subspace of H1
0(0, 1) made up of
the piecewise linear functions on a fixed mesh 0 = x0 <
x1 < · · · < xn = 1. Then the Galerkin Finite Element
method is Find uh ∈ S such that
B(uh, vh) = (f, vh) for all vh(x) ∈ S. (2.6)
2.6 An example of the FEM
Use the FEM on the mesh 0, 1, 2, 3 to find an approx-
imate solution to
−u ′′ + 3u = x on (0, 3), u(0) = u(3) = 0.
Solution: The FEM is: Find uh(x) ∈ S such that
B(uh,vh) := (u ′
h,v ′
h) + 3(uh,vh) = (x,uh)
for all vh(x) ∈ S.
We have that h = 1 so let
ψ1(x) =
x 0 6 x < 1
2 − x 1 6 x 6 2
0 otherwise,
ψ2(x) =
x − 1 1 6 x < 2
3 − x 2 6 x 6 3
0 otherwise,
and
uh(x) = λ1ψ1(x) + λ2ψ2(x).
Our two equations are:
(λ1ψ ′
1 + λ2ψ ′
2,ψ ′
1) + 3(λ1ψ1 + λ2ψ2,ψ1) = (x,ψ1),
(λ1ψ ′
1 + λ2ψ ′
2,ψ ′
2) + 3(λ1ψ1 + λ2ψ2,ψ2) = (x,ψ2).
giving
λ1
(∫
3
0
ψ ′
1ψ ′
1dx + 3
∫
3
0
ψ1ψ1dx
)
+
λ2
(∫
3
0
ψ ′
2ψ ′
1dx + 3
∫
3
0
ψ2ψ1dx
)
=
∫
3
0
xψ1dx
λ1
(∫
3
0
ψ ′
1ψ ′
2dx + 3
∫
3
0
ψ1ψ2dx
)
+
λ2
(∫
3
0
ψ ′
2ψ ′
2dx + 3
∫
3
0
ψ2ψ2dx
)
=
∫
3
0
xψ1dx.
We now need to evaluate these integrals. For example, from the
1st equation:∫
3
0
ψ ′
1ψ ′
1dx =
∫
1
0
(1)2dx +
∫
2
1
(−1)2dx = 2,
∫
3
0
ψ1ψ1dx =
∫
1
0
x2dx +
∫
2
1
(2 − x)2dx = 2/3,
so the coefficient of λ1 is 2 + 3(2/3) = 4. Also,
∫
3
0
ψ ′
2ψ ′
1dx =
∫
2
1
ψ ′
2ψ ′
1dx =
∫
2
1
(1)(−1)dx = −1,
∫
3
0
ψ2ψ1dx =
∫
2
1
ψ2ψ1dx =
∫
2
1
(x − 1)(2 − x)dx = 1/6.
So the coefficient of λ2 is −1+3(1/6) = −1/2. For the right-hand
side:∫
3
0
xψ1dx =
∫
1
0
(x)(x)dx +
∫
2
1
(x)(2 − x)dx = 1/3 + 2/3 = 1.
And so on. The final system is
4λ1 −1
2λ2 = 1, −
1
2λ1 + 4λ2 = 2.
Solving, we get λ1 = 20/63 and λ2 = 34/63. The solution is
uh(x) = (20/63)φ1(x)+(34/63)φ2(x). Note: in general
when r is not constant a quadrature rule is used
to estimate the integrals. The Gaussian Quadrature
methods are the most popular for this.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Obviously these methods are usually implemented
by computer. Also, they involve many more unknowns
than in the example above. However, it is important to
note that
• Any given “hat” function φi is only non-zero on
the region [xi−1, xi+1].
• We have to compute
A(ψi,ψj) =
∫b
a
ψ ′
i(x)ψ ′
j(x) + r(x)ψi(x)ψj(x).
But this will be non-zero only if there is overlap
between [xi−1, xi+1] and [xj−1, xj+1].
• This gives that A(ψi,ψj) = 0 if |i − j| > 1, and
otherwise
A(ψi,ψj) =
∫xi+1
xi−1
ψ ′
i(x)ψ ′
j(x) + r(x)ψi(x)ψj(x).
There are two consequences to this:
(i) It takes less effort to set up the linear systems of
equations than one might have thought.
(ii) The system is tridiagonal, and so relatively easy to
solve. The left-hand side looks like this:
1 0 0 0 · · · 0A(ψ2,ψ1) A(ψ2,ψ2) A(ψ2,ψ3) 0 · · · 0
0 A(ψ3,ψ2) A(ψ3,ψ3) A(2psi3,ψ4) · · · 0
.
.
.. . .
. . .. . . · · ·
.
.
.0 0 0 0 · · · 1

Lecture 3: 6 Wed, 25/01/12
3 FEM Basics: Error Analysis
We discussed some terminology needed to derive an er-
ror analysis for our model problem.
This included:
• Definition of a semi-norm;
• The various notations used to denote the energy
norm. We will opt for
‖u‖B :=√
B(u,u),
where B(·, ·) is the bilinear form defined above. We
will also use the usual norm on L2(Ω):
‖u‖2 :=
∫
Ω
u2.
We proved the Cauchy Schwarz inequality:
|B(u, v)| 6 ‖u‖B‖v‖b.
Exercise 3.1. Use this to prove that ‖ · ‖B is indeed a
norm.
Exercise 3.2. Show that the functional
W(u) :=∫
1
0
(
u ′(x))2
dx is a semi-norm on H1(Ω), and a
norm on H1
0(Ω).
Let’s designate u to be the solution to (1.5), let uh
be the solution to (2.6).
We proved the Galerkin Orthogonality result: Since
S is a subspace of H1
0(0, 1), we have from (1.5) that
A(u, vh) = (f, vh) for all vh. Subtract this from (2.6) to
get that:
A(u − uh, vh) = 0 for all vh ∈ S,
(i.e., the difference between the true and approximate
solutions is orthogonal to S).
Next we used Cauchy-Schwarz to prove that opti-
mality result:
|||u − uh||| 6 |||u − vh||| for all vh ∈ S.
Here is a different proof: Let vh be any function in
S(0, 1). Then
B(u − vh,u − vh) = B(u − uh + uh − vh,u − uh + uh − vh)
= B(u − uh,u − uh)+
B(uh − vh,uh − vh)+
2B(u − uh,uh − vh)
= B(u − uh,u − uh)+
B(uh − vh,uh − vh)
> B(u − uh,u − uh),
because B(uh − vh,uh − vh) > 0.
This again gives
B(u − uh,u − uh) = minvh∈S
B(u − vh,u − vh),
(i.e., there is no element of S that is closer to u than
uh).