2. ΙΜΑΝΤΕΣ
65
ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ 1 2. ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ ΠΕΡΙΕΧΟΜΕΝΑ 2.1 Εισαγωγή............................................................................................................................. 2 2.2 Είδη ιμάντοκινήσεων και εφαρμογές ............................................................................... 3 2.3 Είδη ιμάντων και χρησιμοποιούμενα υλικά ..................................................................... 8 2.3.1 Επίπεδοι ιμάντες ............................................................................................................ 9 2.3.2 Τραπεζοειδείς ιμάντες ................................................................................................. 13 2.3.3 Οδοντωτοί ιμάντες ...................................................................................................... 16 2.4 Υπολογισμός επίπεδων ιμάντων ...................................................................................... 18 2.4.1 Θεωρητικά στοιχεία για τον υπολογισμό ιμάντων ...................................................... 19 2.4.2 Πρακτικός υπολογισμός των επίπεδων ιμάντων τύπου Extremultus 80/85 ................ 28 2.5 Υπολογισμός τραπεζοειδών ιμάντων .............................................................................. 36 2.5.1 Υπολογισμός γεωμετρικών στοιχείων ιμαντοκίνησης ................................................ 36 2.5.2 Υπολογισμός ισχύος, δυνάμεων .................................................................................. 41 2.6 Υπολογισμός τραπεζοειδών ιμάντων με πτερύγια ......................................................... 45 2.6.1 Υπολογισμός γεωμετρικών στοιχείων ιμαντοκίνησης ................................................ 45 2.6.2 Υπολογισμός ισχύος, δυνάμεων .................................................................................. 49 2.7 Υπολογισμός οδοντωτών ιμάντων................................................................................... 54 2.8 ∆ιαμόρφωση των ιμανοκινήσεων .................................................................................... 61 2.8.1 Γενικά .......................................................................................................................... 61 2.8.2 Κυριώτερες διαστάσεις τροχαλιών ............................................................................. 61 2.8.3 Υλικά και κατασκευαστική διαμόρφωση των τροχαλιών........................................... 62
-
Upload
faidon-karnezis -
Category
Documents
-
view
33 -
download
14
Transcript of 2. ΙΜΑΝΤΕΣ

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
1
2. ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
ΠΕΡΙΕΧΟΜΕΝΑ
2.1 Εισαγωγή............................................................................................................................. 2
2.2 Είδη ιµάντοκινήσεων και εφαρµογές ............................................................................... 3
2.3 Είδη ιµάντων και χρησιµοποιούµενα υλικά..................................................................... 8
2.3.1 Επίπεδοι ιµάντες............................................................................................................ 9
2.3.2 Τραπεζοειδείς ιµάντες ................................................................................................. 13
2.3.3 Οδοντωτοί ιµάντες ...................................................................................................... 16
2.4 Υπολογισµός επίπεδων ιµάντων ...................................................................................... 18
2.4.1 Θεωρητικά στοιχεία για τον υπολογισµό ιµάντων...................................................... 19
2.4.2 Πρακτικός υπολογισµός των επίπεδων ιµάντων τύπου Extremultus 80/85................ 28
2.5 Υπολογισµός τραπεζοειδών ιµάντων .............................................................................. 36
2.5.1 Υπολογισµός γεωµετρικών στοιχείων ιµαντοκίνησης ................................................ 36
2.5.2 Υπολογισµός ισχύος, δυνάµεων.................................................................................. 41
2.6 Υπολογισµός τραπεζοειδών ιµάντων µε πτερύγια ......................................................... 45
2.6.1 Υπολογισµός γεωµετρικών στοιχείων ιµαντοκίνησης ................................................ 45
2.6.2 Υπολογισµός ισχύος, δυνάµεων.................................................................................. 49
2.7 Υπολογισµός οδοντωτών ιµάντων................................................................................... 54
2.8 ∆ιαµόρφωση των ιµανοκινήσεων.................................................................................... 61
2.8.1 Γενικά .......................................................................................................................... 61
2.8.2 Κυριώτερες διαστάσεις τροχαλιών ............................................................................. 61
2.8.3 Υλικά και κατασκευαστική διαµόρφωση των τροχαλιών........................................... 62

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
2
2.1 Εισαγωγή
Ιµάντες χρησιµοποιούνται τόσο για την µετάδοση ισχύος όσο και για την µεταφορά υλικών
(µεταφορικές ταινίες). Στα πλαίσια αυτού του κεφαλαίου θα εξεταστεί η πρώτη εφαρµογή, ενώ η
δεύτερη εξετάζεται στα πλαίσια των ανυψωτικών και µεταφορικών µηχανών.
Με ιµάντες είναι δυνατή η µετάδοση ισχύος ανάµεσα :
σε παράλληλες ατράκτους
σε ατράκτους, των οποίων οι άξονες σχηµατίζουν οποιαδήποτε γωνία
σε ατράκτους, οι οποίες βρίσκονται σε µεγάλη απόσταση .
Γενικά, υπάρχουν ιµάντες χωρίς οδόντωση, στους οποίους η µετάδοση της κίνησης γίνεται µε την
βοήθεια δυνάµεων τριβής, και ιµάντες µε οδόντωση, στους οποίους η µετάδοση κίνησης οφείλεται σε
σύνδεση µορφής. Για την δηµιουργία των δυνάµεων τριβής στους ιµάντες χωρίς οδόντωση είναι
απαραίτητη η ύπαρξη προέντασης, η οποία είναι ανάλογη της µεταφερόµενης ροπής στρέψης και η
οποία όµως προκαλεί µια πρόσθετη ακτινική φόρτιση των ατράκτων.
Έναντι των µεταδόσεων ισχύος µε οδοντωτούς τροχούς ή µε αλυσίδες οι ιµάντες έχουν τα ακόλουθα
πλεονεκτήµατα µειονεκτήµατα
ελαστική µετάδοση δυνάµεων
ήσυχη λειτουργία
απόσβεση κραδασµών και κρουστικών
φορτίων
απλή και φτηνή κατασκευή
µετάδοση ισχύος σε µεγάλες αποστάσεις
δεν χρειάζεται λίπανση
µικρό κόστος συντήρησης
είναι δυνατή η υλοποίηση µεγάλων
σχέσεων µετάδοσης σε µία βαθµίδα
χαµηλός λόγος βάρους προς
µεταφερόµενη ισχύ
µεγάλες περιφερειακές ταχύτητες
µη σταθερή σχέση µετάδοσης
(αποτέλεσµα της παραµόρφωσης του ιµάντα)
µεγάλυτερη φόρτιση των ατράκτων
ογκοδέστερες κατασκευές
περιορισµένο εύρος θερµοκρασιών
λειτουργίας
µεγάλη επιρροή περιβάλλοντος
λειτουργίας
πιθανή εµφάνιση ηλεκτροστατικών
φορτίων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
3
2.2 Είδη ιµάντοκινήσεων και εφαρµογές
Ανάλογα µε τον τρόπο κατασκευής οι ιµαντοκινήσεις διακρίνονται από
α) το είδος του χρησιµοποιούµενου ιµάντα σε :
ιµαντοκινήσεις µε επίπεδους ιµάντες, οι οποίες χαρακτηρίζονται από την απλή κατασκευή, και είναι
κατάλληλες για την µετάδοση ισχύος σε ατράκτους µε µεγάλη µεταξύ τους απόσταση. Είναι δυνατή η
µετάδοση µεγάλων ροπών.
ιµαντοκινήσεις µε τραπεζοειδείς ιµάντες, οι οποίες είναι κατάλληλες για την επίτευξη µεγάλων
σχέσεων µετάδοσης µε µικρές αποστάσεις µεταξύ των ατράκτων. Χρησιµοποιούνται ευρύτατα για
µετάδοση µέσων ισχύων σε διάφορες µηχανές και συσκευές.
ιµαντοκινήσεις µε οδοντωτούς ιµάντες, οι οποίες επιτυγχάνουν ακριβείς σχέσεις µετάδοσης.
Χρησιµοποιούνται στην µετάδοση µικρών ισχύων.
β) τον τρόπο οδήγησης του χρησιµοποιούµενου ιµάντα σε :
ανοικτή διάταξη, σχ. 2-1α, σε οριζόντια, κεκλιµένη και κάθετη εγκατάσταση.
διασταυρούµενη διάταξη, σχ. 2-1β, σε οριζόντια, κεκλιµένη και κάθετη εγκατάσταση. Επιτυγχάνεται
η περιστροφή της κινούµενης ατράκτου µε αντίθετη φορά από αυτή της κινητήριας. Η επαφή των δύο
κλάδων του ιµάντα πρέπει να αποφευχθεί. ∆εν µπορεί να υλοποιηθεί µε τραπεζοειδείς ιµάντες.
ηµιδιασταυρούµενη διάταξη, σχ. 2-1γ, για µετάδοση ισχύος µεταξύ ατράκτων, των οποίων οι άξονες
είναι ασύµβατοι. Και για την συγκεκριµένη διάταξη είναι ακατάλληλοι οι τραπεζοειδείς ιµάντες. (Θα
πρέπει να χρησιµοποιηθούν κυλινδρικές τροχαλίες και να κρατηθούν συγκεκριµένες αποστάσεις).
γωνιακή διάταξη, σχ. 2-1δ, για µετάδοση ισχύος µεταξύ ατράκτων, των οποίων οι άξονες είναι στο
ίδιο επίπεδο και σχηµατίζουν κάποια γωνία. Θα πρέπει να χρησιµοποιούνται οδηγητήριες τροχαλίες
µε µεγάλες διαµέτρους, για να αποφευχθεί υψηλή καµπτική φόρτιση του ιµάντα.
διάταξη πολλαπλής µετάδοσης, σχ. 2-1ε, για την µετάδοση ισχύος από συνήθως µία κινητήρια
άτρακτο σε δύο ή περισσότερες κινούµενες ατράκτους.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
4
ΕΛΚΟΜΕΝΟΣ ΚΛΑ∆ΟΣ
a
β
ΑΠΟΣΤΑΣΗ ΑΤΡΑΚΤΩΝ
ΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
ΚΛΑ∆ΟΣ ΕΛΞΗΣ
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑ
d
1
11
n d
n2
2
2β
Σχ. 2-1α Ανοικτή διάταξη
Σχ. 2-1β ∆ιασταυρούµενη διάταξη
Σχ. 2-1γ Ηµιδιασταυρούµενη διάταξη
Σχ. 2-1δ Γωνιακή διάταξη
ΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
Σχ. 2-1ε Πολλαπλή µετάδοση κίνησης
γ) τον τρόπο προέντασης του ιµάντα σε :

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
5
Σχ. 2-2α Προένταση µε τάνυση του ιµάντα
διάταξη προέντασης µε
τάνυση του ιµάντα, σχ. 2-2α
Ο ιµάντας είναι µικρότερος από
αυτόν που αντιστοιχεί για την
σταθερή απόσταση ατράκτων a,
έτσι ώστε κατά την τοποθέτησή του
καταρχήν τανύεται (επιµηκύνεται
ελαστικά) και κατόπιν εφαρµόζεται.
Αυτός ο τρόπος πολλές φορές επαρκεί για αποστάσεις ατράκτων έως 5m και είναι κατάλληλος και για
κεκλιµένη ή κάθετη εγκατάσταση.
Σχ. 2-2β Προένταση µε βοηθητική τροχαλία
διάταξη προέντασης µε
βοηθητική τροχαλία, σχ. 2-2β.
Τροχαλίες προέντασης, οι οποίες
τοποθετούνται συνήθως κοντά στην
µικρή τροχαλία (και στον ελκόµενο
κλάδο), µε την βοήθεια βαρών ή
ελατηρίων τανύουν τον ιµάντα (ενώ
ταυτόχρονα αυξάνουν την γωνία
τύλιξης και εποµένως, όπως δείχνεται
σε επόµενη παράγραφο, αυξάνει η
δυνατή µεταφερόµενη στρεπτική ροπή).
Αυτή η διάταξη είναι κατάλληλη για µεγάλες µεταφερόµενες ισχείς, όταν η απόσταση των ατράκτων
κατασκευάζεται σταθερή. ∆εν είναι δυνατή η αλλαγή της φοράς περιστροφής.
Σχ. 2-2γ Προένταση µε ολισθαίνουσα βάση
διάταξη προέντασης µε
ολισθαίνουσα βάση, σχ. 2-2γ.
Ο κινητήρας τοποθετείται σε βάση, η
οποία µε την βοήθεια κατάλληλης
διαµόρφωσης δίνει την δυνατότητα
µετατόπισης του κινητήρα.
Με τον τρόπο αυτό είναι δυνατή η αυξοµείωση της αξονικής απόστασης των ατράκτων (µειώνεται η
αξονική απόσταση των ατράκτων - τοποθετείται ο ιµάντας - αυξάνει η αξονική απόσταση και
ταυτόχρονα τανύεται ο ιµάντας). Είναι ο συνηθήστερα χρησιµοποιούµενος τρόπος σε απλές
µεταδόσεις ισχύος.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
6
Σχ. 2-2δ Προένταση µε κυλιόµενη βάση
διάταξη προέντασης µε
κυλιόµενη βάση, σχ. 2-2δ.
Ο κινητήρας συνδέεται σε βάση, η οποία
µπορεί να µετατοπίζεται κυλιόµενη σε
άλλη σταθερή βάση. Η λειτουργία της
διάταξης αυτής είναι παράµοια µε τη
προηγούµενη.
Χρησιµοποιείται συνηθέστερα στην τάνυση µεταφορικών ταινιών.
Σχ. 2-2ε Αυτορυθµιζόµενη διάταξη προέντασης
αυτορυθµιζόµενη διάταξη
προέντασης.
Είναι η ιδανικότερη λύση στο πρόβληµα
της προέντασης, διότι εξασφαλίζει σε
κάθε κατάσταση λειτουργίας την ακριβή
‘ποσότητα’ προέντασης.
Στο σχ. 2-2ε παρουσιάζεται ένας τρόπος
µε αυτορυθµιζόµενη διάταξη προέντασης,
κατά τον οποίο ο κινητήρας εδράζεται µε
τρόπο, ώστε να είναι δυνατή η µερική
περιστροφή του γύρω από διαφορετικό
άξονα από αυτό της κινητήριας τοχαλίας.
Ο συνδιασµός των δυνάµεων, που εµφανίζονται στον ιµαντοκίνηση και αδρανειακών δυνάµεων στον
κινητήρα προκαλεί την µερική περιστροφή του κινητήρα και ταυτόχρονα την τάνυση του ιµάντα.
Αυτός ο τρόπος (ειδικά σε νέες κατασκευές) θα πρέπει να αποφεύγεται διότι µπορεί να οδηγήσει σε
ταλαντώσεις του κινητήρα.
Σε άλλη αυτορυθµιζόµενη διάταξη προέντασης, στην οποία ο κινητήρας είναι σταθερός, η κινητήρια
τροχαλία τοποθετείται έκκεντρα σε σχέση µε την άτρακτο του κινητήρα και παίρνει κίνηση από τον
κινητήρα µέσω ζεύγους οδοντωτών τροχών. Η τάνυση του ιµάντα επιτυγχάνεται µε την µερική
στροφή (εξαιτίας αδρανειακών δυνάµεων) της τροχαλίας.
Είναι δυνατή η κατασκευή ιµαντοκινήσεων µε µεταβλητή σχέση µετάδοσης, οι συνηθέστερες µορφές
των οποίων είναι:

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
7
ΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
ΙΜΑΝΤΑ
Σ
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑ
Σχ. 2-3α ∆ιάταξη µε κλιµακωτή µεταβολή της
σχέσης µετάδοσης
διάταξη µε κλιµακωτή µεταβολή της
σχέσης µετάδοσης, σχ. 2-3α.
Η σχέση µετάδοσης µπορεί να µεταβληθεί
κλιµακωτά εφαρµόζοντας τον ιµάντα σε
διαφορετικό ζεύγος τροχαλιών. Επειδή η
απόσταση των ατράκτων παραµένει η ίδια, θα
πρέπει οι τροχαλίες κάθε ζεύγους να επιλεγούν µε
τρόπο, ώστε το προκύπτον µήκος λειτουργίας του
ιµάντα να είναι το ίδιο για όλα τα ζεύγη. Η
αλλαγή της σχέσης µετάδοσης µπορεί να γίνει
µόνο σε στάση. Η διάταξη αυτή είναι κατάλληλη
και για διασταυρούµενες διατάξεις.
ΤΡΟΧΟΙ Ο∆ΗΓΗΣΗΣ-ΜΕΤΑΤΟΠΙΣΗΣ
ΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
ΙΜΑΝ
ΤΑΣ
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑ
Σχ. 2-3β ∆ιάταξη µε κωνικές τροχαλίες
διάταξη µε κωνικές τροχαλίες, σχ. 2-3β.
Είναι κατάλληλη για συνεχή µεταβολή της
σχέσης µετάδοσης, η οποία µπορεί να λάβει χώρα
και κατά την λειτουργία µε την βοήθεια
κατάλληλου µοχλού. Η κλίση των κωνικών
επιφανειών των δύο τροχαλιών θα πρέπει να είναι
ίδια, έτσι ώστε σε όλες τις δυνατές θέσεις του
ιµάντα να προκύπτει το ίδιο µήκος λειτουργίας
του.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
8
Σχ. 2-3γ ∆ιάταξη µε ρυθµιζόµενες τροχαλίες
ΤΡΟΧΟ
Ι Ο∆ΗΓΗ
ΣΗΣ-ΜΕΤ
ΑΤΟΠΙΣΗΣ
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑ
ΙΜΑΝ
ΤΑΣ
ΕΛΕΥΘΕΡΗ ΤΡΟΧΑΛΙΑ
ΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
Σχ. 2-3δ ∆ιάταξη µε τροχαλία αποµόνωσης
διάταξη µε ρυθµιζόµενες τροχαλίες, σχ. 2-3γ. Είναι επίσης κατάλληλη για συνεχή µεταβολή
της σχέσης µετάδοσης. Χρησιµοποιούνται τροχαλίες, οι οποίες αποτελούνται από κωνικούς δίσκους,
των οποίων η απόσταση είναι δυνατό να ρυθµίζεται. Με τον τρόπο αυτό µεταβάλλεται η ενεργή
διάµετρος τους και εποµένως η σχέση µετάδοσης.
διάταξη µε τροχαλία αποµόνωσης, σχ. 2-3δ. Χρησιµοποιείται για την διακοπή της
µετάδοσης κίνησης (χωρίς διακοπή της λειτουργίας του κινητήρα). Αυτό επιτυγχάνεται µε την
µετατόπιση του ιµάντα (µε την βοήθεια κατάλληλου µοχλού) σε τροχαλία, η οποία µπορεί σε σχέση
µε την κινούµενη άτρακτο να περιστρέφεται ελεύθερα.
2.3 Είδη ιµάντων και χρησιµοποιούµενα υλικά
Οι κατασκευαζόµενοι ιµάντες κατατάσσονται σε τρεις γενικές κατηγορίες ανάλογα µε την µορφή
τους, οι οποίες είναι :
επίπεδοι ιµάντες
τραπεζοειδείς ιµάντες
οδοντωτοί ιµάντες

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
9
Οι απαιτούµενες από τους ιµάντες ιδιότητες, οι οποίες είναι απαραίτητες για την ασφαλή λειτουργία
των ιµαντοκινήσεων και οι οποίες σε γενικές γραµµές προσδιορίζουν τόσο την µορφή όσο και τα
υλικά που χρησιµοποιούνται για την κατασκευή των σύγχρονων ιµάντων, είναι :
υψηλή αντοχή, έτσι ώστε να είναι δυνατή η επίτευξη µεγάλων δυνάµεων προέντασης και αντίστοιχα η
µεταφορά µεγάλων στρεπτικών ροπών.
µεγάλος συντελεστής τριβής µε την τροχαλία, έτσι ώστε ακόµη και µε χαµηλή δύναµη προέντασης να
είναι δυνατή η µεταφορά µεγάλης στρεπτικής ροπής.
µικρή ευαισθησία στις συνθήκες του περιβάλλοντος (σκόνη, υγρασία, θερµοκρασία κ.ά.), έτσι ώστε η
µεταφερόµενη ισχύς να παραµένει κατά το δυνατό σταθερή.
Συνέπεια των παραπάνω επιδιώξεων αλλά και των κατασκευαστικών αναγκών, είναι ότι, όλα τα
παραπάνω είδη (επίπεδοι, τραπεζοειδείς, οδοντωτοί) έχουν γενικά την ίδια περίπου δοµή. Στο
εσωτερικό τους υπάρχουν ίνες από πολυεστέρα, πολυαµίδιο ή ακόµη από χάλυβα ή γυαλί, οι οποίες
είναι υπεύθυνες για την παραλαβή των εφελκυστικών δυνάµεων. Οι ίνες αυτές περιβάλλονται από
ειδικά ελαστοµερή, τα οποία στην περίπτωση των επίπεδων και τραπεζοειδών ιµάντων έχουν ως κύρια
αποστολή την επίτευξη των κατάλληλων συνθηκών τριβής µε την τροχαλία. Από παρόµοια
ελαστοµερή κατασκευάζεται η οδόντωση στην περίπτωση των οδοντωτών ιµάντων.
100
1
Ταχύτητα σε m/s400 20 60 80
0,5
2
P/Pmax3
1,06
4
5
4 ΣΤΕΝΟΙ ΤΡΑΠΕΖΟΕΙ∆ΕΙΣ ΙΜΑΝΤΕΣ
ΕΠΙΠΕ∆ΟΙ ΙΜΑΝΤΕΣ
Ο∆ΟΝΤΩΤΟΙ ΙΜΑΝΤΕΣ
6
5
ΚΑΝΟΝΙΚΟΙ ΤΡΑΠΕΖΟΕΙ∆ΕΙΣ ΙΜΑΝΤΕΣ
Ο∆ΟΝΤΩΤΕΣ ΑΛΥΣΙ∆ΕΣ
ΑΛΥΣΙ∆ΕΣ (ΜΕ ΚΥΛΙΝ∆ΡΙΣΚΟΥΣ)
2
3
1
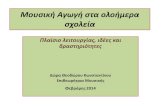
Σχ. 2-4 Χρήση στοιχείων µετάδοσης κίνησης
Σε ότι αφορά την επιλογή
του σωστού για
συγκεκριµµένη εφαρµογή
είδους ιµάντα, θα πρέπει
να τονιστεί ότι άν και στο
θέµα αυτό δεν είναι
σαφής η οριοθέτηση το
σχ. 2-4 (όπου βέβαια
συγκρίνονται και άλλοι
τρόποι µετάδοσης ισχύος)
παρέχει κάποια βοήθεια.
Για τους οδοντωτούς ιµάντες ωστόσο, είναι προφανές ότι χρησιµοποιούνται, όταν προέχει η ακρίβεια
στην µετάδοση κίνησης (π.χ. µετάδοση κίνησης από τον κινητήρα στον εκκεντροφόρο.
2.3.1 Επίπεδοι ιµάντες

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
10
Στη διάρκεια της εξέλιξης των επίπεδων ιµάντων υπήρξαν διάφοροι τύποι, οι περισσότεροι των
οποίων χρησιµοποιούνται σπανιότατα σήµερα, αλλά αναφέρονται εδώ για πληρέστερη ενηµέρωση επί
του θέµατος. Στον πίν. 2-1 παρατίθενται οι ιδιότητες των σηµαντικότερων τύπων επίπεδων ιµάντων,
που συνοπτικά είναι οι εξής:
∆ερµάτινοι ιµάντες. Κατασκευάζονται από καθαρό δέρµα και µπορούν - υπό συνθήκες - να
επιτύχουν µεγάλους συντελεστές τριβής. Η ισχύς, που µπορεί να µεταφερθεί, είναι µικρή και για τον
λόγο αυτό χρησιµοποιούνται πλέον σπάνια.
Υφασµάτινοι ιµάντες. Πλέκονται ίνες, οι οποίες είναι είτε οργανικές (βαµβάκι, µαλλί, µετάξι
κ.ά.) είτε συνθετικές (συνθετικό µετάξι, νάυλον κ.ά). Θα πρέπει να αποφεύγεται επαφή µε (ειδικά
µεταλλικών αντικειµένων) ακµές, διότι υπάρχει κίνδυνος να κοπούν.
Συνθετικοί ιµάντες. Κατασκευάζονται από συνθετικά υλικά (Νάυλον, περλόν κ.ά.), είναι
πρακτικά µη ελαστικά παραµορφώσιµοι και έχουν υψηλή αντοχή. Χρησιµοποιούνται παρά ταύτα
σπάνια, διότι έχουν κακή συµπεριφορά τριβής.
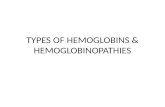
Σύνθετοι ιµάντες πολλαπλών στρωµάτων(σχ. 2-5). Χρησιµοποιούνται - σχεδόν
αποκλειστικά - στην σηµερινή εποχή για την µετάδοση ισχύος. Αποτελούνται συνήθως από τρία
στρώµατα,
L
Z
L
Z
L
D
D
Z
Z
D
Σχ. 2-5 ∆οµή των σύνθετων ιµάντων
το στρώµα εφελκυσµού (Z), κατασκευασµένο από ίνες (πολυαµιδίου, πολυεστέρα, κ.ά.), το
οποίο προσδίδει στον ιµάντα αντοχή εφελκυσµού 450 ÷600 N/mm2 και υψηλό µέτρο ελαστικότητας
το στρώµα τριβής (L), κατασκευασµένο από ειδικό συνθετικό δέρµα για την επίτευξη
µεγάλων συντελεστών τριβής ακόµη και σε δυσµενές περιβάλλον λειτουργίας
και το στρώµα επικάλυψης (D), κατασκευασµένο από ύφασµα εµποτισµένο σε ελαστοµερές
για προστασία του ιµάντα.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
11
Ιµάντες αυτού του τύπου κατασκευάζονται και µε περισσότερα από ένα στρώµατα εφελκυσµού. Είναι
δυνατή ακόµη η κατασκευή του στρώµατος επικάλυψης από το ίδιο υλικό από το οποίο είναι
κατασκευασµένο το στρώµα τριβής και αυτό είναι σκόπιµο, όταν ο ιµάντας θα έλθει σε επαφή µε
τροχαλία µεταδίδοντας κίνηση και από τις δύο πλευρές.
Οι σύνθετοι ιµάντες πολλαπλών στρωµάτων έχουν ευρύτατη εφαρµογή καθώς είναι δυνατή η χρήση
τους για µετάδοση ισχύος έως 60 kW/cm. Είναι ακόµη δυνατή η επίτευξη περιφερειακών ταχυτήτων
έως και 100 m/s (και µεγαλύτερων σε εξαιρετικές περιπτώσεις), πιν. 2-1. Έχουν µεγάλη διάρκεια ζωής
και λειτουργούν µε υψηλούς βαθµούς απόδοσης (≈98%).
Οι επίπεδοι ιµάντες προµηθεύονται είτε σε ατέρµονη µορφή (έτοιµοι για τοποθέτηση) είτε σε µεγάλα
µήκη, από τα οποία κόβεται το κατάλληλο για µια συγκεκριµένη εφαρµογή κοµµάτι. Στην συνέχεια τα
άκρα αυτού συνδέονται µεταξύ τους, έτσι ώστε να προκύψει η ατέρµονη µορφή. Η σύνδεση αυτή
είναι σκόπιµο να γίνεται µε κόλληση/συγκόλληση σύµφωνα µε τις οδηγίες του κατασκευαστή. Από
την ποιότητα αυτής της σύνδεσης εξαρτάται η πλήρης αξιοποίηση των δυνατότητων του ιµάντα. Στο
σχ. 2-6 δείχνονται µερικοί τρόποι σύνδεσης.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
12
Υλικά Ιµάντων σzθ σz,επ Ε Εb ρ x 10-6t b µ (d1/t)min vopt fb,max θmax
N/mm2 N/mm2 N/mm2 N/mm2 Kg/mm3 mm mm - - m/s s-1 oC50 3 …7 20 … 600 3070 8 …12 20 … 1800 3590 14 … 20 20 … 1800 4540 3 …7 20 … 600 2560 8 …12 20 … 1800 3080 14 … 20 20 … 1800 4030 3 …7 20 … 600 2050 8 …12 20 … 1800 2570 14 … 20 20 … 1800 3530 3 …7 20 … 600 2050 8 …12 20 … 1800 2570 14 … 20 20 … 1800 35
Βαµβακερή ύφανση µε καουτσούκ 53 4 900 50 1,2 2,1 … 9,1 20 … 300 30 33 25 70
Βαµβακερή ύφανση µεκαουτσούκ και µπαλάτα
55 4,4 780 50 1,25 2 … 10 20 … 300 29 34 25 45
Βαµβακερή ύφανση µε µπαλάτα 58 4,4 1200 50 1,25 2 … 10 20 … 300 25 34 25 40Ύφανση από τεχνητόµετάξι και µπαλάτα 72 5,5 30 1,25 4 ή 5 60 … 270 20 38 25 40
Εµποτισµένο τεχνητό µετάξι 50 4,2 40 1 2 … 18 0,35 25 37 40 70Επµοτισµένο τεχνητό βαµβάκι 48 4 1,1 2 … 10 0,8 25 34 40 70Nylon ή Perlon 200 9 40 1,1 0,15 25 75 75 75Βαµβάκι 42 3,7 950 40 1,3 4 … 12 0,3 20 31 40 70Ζ : ίνες πολυαµιδίου ή πολυεστέραL : καουτσούκ
14 … 25 600 … 700 300 0,5 … 3,6 10 … 750 0,7 40 … 125 69 90
Ζ : ίνες πολυαµιδίου ή πολυεστέραL : δέρµα
4 … 12 500 … 600 250 0,5 … 3,6 10 … 750 0,6 29 … 100 69 90
Ζ : στρώµατα πολυαµιδίουL : καουτσούκ 6 … 18 500 …
600 250 0,5 … 3,6 10 … 750 0,7 40 … 125 69 90
Ζ : στρώµατα πολυαµιδίουL : δέρµα
4 … 15 400 … 500 200 0,5 … 3,6 10 … 750 0,6 29 … 100 69 90
1500 330 210000 210000 7,8 0,6… 1,1 20 … 250 0,75 1000 118
* Μπαλάτα είναι φυτική ύλη, στην οποία εµβαπτίζονται οι ίνες* Το πάχος t στην περίπτωση των σύνθετων ιµάντων αναφέρεται στο πάχος του στρώµατος εφελκυσµού (L)* Τυποποίηση πλάτους b : 16 20 25 32 40 50 63 71 80 90 100 112 125 140 160 180 200 225 250 280 315 360 400 450 500 560
Κανονικό τύπου F ή S 25 3,9 250 1
Πλευρά κρέατος
: 0,2
2 +
(v /
83)
Πλευρά τριχών
: 0,3
3 +
(v /
50)
v [m
/s]
36 5
44 25
35
∆έρµα
Εύκαµπτο τύπου G 30 1,7 350 0,95 40 10 35
Πολύ εύκαµπτο τύπου HGL 35 5,4 450 450,9
Πολύ εύκαµπτο τύπου HGC 38 5,9 450 0,9 46 25 70
100
Χαλυβδοταινία σε τροχαλία µε επίστρωµα φελού
Καουτσο
ύκΜπαλάτα
0,5
Υφαντοί µε
νήµατα
απ
όΣύνθετοι
ιµάντες
1,1 … 1,4
Πίν. 2-1 Ιδιότητες επίπεδων ιµάντων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
13
Σχ. 2-6 ∆ιάφοροι τρόποι σύνδεσης επίπεδων ιµάντων
2.3.2 Τραπεζοειδείς ιµάντες
Οι τραπεζοειδείς ιµάντες διακρίνονται από την τραπεζοειδή µορφή της διατοµής τους, σχ. 2-7.
Αποτελούνται από :
ένα στρώµα εφελκυσµού, πού είναι µία ή περισσότερες στρώσεις ινών από πολυεστέρα ή
πολυαµίδιο,
τον πυρήνα, ο οποίος βρίσκεται γύρω από το στρώµα εφελκυσµού και κατασκευάζεται από υψηλής
ποιότητας συνθετικό καουτσούκ,
το στρώµα επικάλυψης, το οποίο κατασκευάζεται από εµβαπτισµένο σε ελαστοµερές ύφασµα (από
βαµβακερές ή συνθετικές ίνες) και το οποίο περιβάλλει τον πυρήνα.
(εξαίρεση από το παραπάνω είναι ο τύπος τραπεζοειδούς ιµάντα µε γυµνές παρειές)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
14
α) β) γ)
δ) ε)
ζ)
Σχ. 2-7. ∆ιάφοροι τύποι τραπεζοειδών ιµάντων
Για την ικανοποίηση των αναγκών διαφόρων εφαρµογών αναπτύχθηκαν οι εξής τύποι τραπεζοειδών
ιµάντων :
Κανονικοί τραπεζοειδείς ιµάντες, σχ. 2-7α.
Στενοί τραπεζοειδείς ιµάντες, σχ. 2-7β.
Πλατείς τραπεζοειδείς ιµάντες, σχ. 2-7δ.
∆ίπλοί τραπεζοειδείς ιµάντες, σχ. 2-7ε.
Πολλαπλοί τραπεζοειδείς ιµάντες

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
15
Τραπεζοειδείς ιµάντες µε πτερύγια, σχ. 2-7ζ.
Με σκοπό την επίτευξη µεγαλύτερης ευκαµψίας κατασκευάζονται εγκοπές στην εσωτερική πλεύρά
τραπεζοειδών ιµάντων (που µοιάζουν µε οδόντωση), οπότε προκύπτουν παραλλαγές των παραπάνω
τύπων, σχ. 2-7γ.
Οι συνεργαζόµενες µε τους τραπεζοειδείς ιµάντες τροχαλίες έχουν αντίστοιχη τραπεζοειδή διατοµή,
σχ. 2-7η. Κατά την λειτουργία ο ιµάντας εισχωρεί στην τροχαλία και µε βάση την αρχή της σφήνας
(γωνία σφήνας 32° ÷ 38°) δηµιουργούνται οι απαραίτητες δυνάµεις τριβής στην επιφάνεια των
παρειών ιµάντα και τροχαλίας (η κάτω πλευρά του ιµάντα δεν πρέπει να αγγίζει την τροχαλία).
FW
φ
NF NF
Σχ. 2-7 η
Αναπτυσσόµενες
δυνάµεις κατά την
συνεργασία τραπε-
ζοειδούς ιµάντα µε
αντίστοιχη τροχαλία
Το πλεονέκτηµα των τραπεζοειδών ιµάντων έναντι των επίπεδων είναι το ότι µε µικρές ήδη δυνάµεις
προέντασης (εξαιτίας της αρχής της σφήνας) προκύπτουν σηµαντικές δυνάµεις τριβής. Έτσι η
πρόσθετη φόρτιση των ατράκτων λόγω της δύναµης προέντασης µπορεί να είναι µικρότερη. Από την
άλλη πλευρά, εξαιτίας του µεγαλύτερου σχετικά όγκου, ο οποίος υπόκειται σε παραµόρφωση κατά
την λειτουργία (κάµψη στις τροχαλίες), παράγεται µεγαλύτερο ποσό θερµότητας και εποµένως ο
βαθµός απόδοσης των τραπεζοειδών ιµάντων είναι γενικά µικρότερος από αυτόν των επίπεδων.
Από τους διάφορους τύπους τραπεζοειδών ιµάντων οι τραπεζοειδείς ιµάντες µε πτερύγια έχουν στον
µικρότερο δυνατό βαθµό το παραπάνω µειονέκτηµα. Μπορούν δε να λειτουργήσουν σε µεγάλες
ταχύτητες χωρίς ταλαντώσεις και αθόρυβα. Έχουν κατασκευαστεί ιµάντες αυτού του τύπου, οι οποίοι
λειτουργούν ικανοποιητικά και σε θερµοκρασίες 80 °C, είναι καλοί αγωγοί του ηλεκτρισµού και
ανθεκτικοί σε δύσκολο περιβάλλον εργασίας.
Οι τραπεζοειδείς ιµάντες γενικά προµηθεύονται σε ατέρµονα µορφή (έτοιµοι για εφαρµογή), σε
τυποποιηµένα µήκη, έτσι ώστε δεν είναι δυνατή η υλοποίηση οιασδήποτε απόστασης ατράκτων.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
16
Οι βασικές ιδιότητες και οι εφαρµογές των διάφορων τύπων τραπεζοειδών ιµάντων συνοψίζονται
στον πιν. 2-2.
Κανονικοί τραπεζοειδείς
(DIN 2215)
Στενοί Τραπεζοειδείς
(DIN 7753)
Ιµάντες µε πτερύγια
Pmax
[kW / Ιµάντα] 70 70 201)
vmax [m/s] 30 40 60
fb,max [1/sec] 60 100 90
imax [ - ] 15 10 40
Ιδιότητες, Εφαρµογές
Για ίδιο πλάτος µεταφέρουν µεγαλύτερη ισχύ από τους κανονικούς
Επιτρέπουν την χρήση µικρότερων τροχαλιών – συµπαγείς κατσκευές
1) kW / πτερύγιο
Φαρδείς τραπεζοειδείς ∆ιπλοί Τραπεζοειδείς Ανοικτών πλευρών
Pmax
[kW / Ιµάντα] 85 30 70
vmax [m/s] 30 30 50
fb,max [1/sec] 80 120
imax [ - ] 92) 5 20
Ιδιότητες, Εφαρµογές
Για χρήση σε διατάξεις (σχ. 2.3.γ) µεταβαλόµενης σχέσης µετάδοσης
Για µετάδοση κίνησης σε περισσότερες ατράκτους και µε αντιστροφή της φοράς περιστροφής.
Μικρότερες απαιτούµενες τροχαλίες. Σχετικά φθηνοί.
2) Περιοχή ρύθµισης
Πίν. 2.2 Ενδεικτικές βασικές ιδιότητες και εφαρµογές τραπεζοειδών ιµάντων
2.3.3 Οδοντωτοί ιµάντες
Η λειτουργία των οδοντωτών ιµάντων βασίζεται στην αρχή της µετάδοσης δυνάµεων µε σύνδεση
µορφής. Ο ιµάντας έχει προεξοχές (δόντια) σε συγκεκριµµένη µεταξύ τους απόσταση (σχ. 2-8), οι
οποίες εισχωρούν σε αντίστοιχα διάκενα των τροχαλιών και υλοποιούν την σύνδεση µορφής.
α)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
17
β)
γ)ΠΛΕΥΡΙΚΗ ΣΤΗΡΙΞΗ
ΠΛΕΥΡΙΚΗ ΣΤΗΡΙΞΗ
Σχ. 2-8 Οδοντωντοί ιµάντες. α) µε απλή οδόντωση, β) µε διπλή οδόντωση, γ) σε συνδιασµό µε
αντίστοιχες τροχαλίες
Ο ιµάντας αυτού του είδους αποτελείται, όπως και οι προηγούµενοι από :
το στρώµα εφελκυσµού (χαλύβδινες ή γυάλινες ίνες ή ίνες πολυµερών)
το σώµα του ιµάντα (µείγµα ελαστοµερών), το οποίο σχηµατίζει και τα δόντια
το στρώµα επικάλυψης (πλεγµένες ίνες πολυαµιδίου), το οποίο περιβάλει και προστατεύει
από την φθορά τον ιµάντα.
Ανάλογα µε το προφίλ της οδόντωσης, δικρίνονται δύο τύποι οδοντωτών ιµάντων :
µε τραπεζοειδές προφίλ, σχ.2-9α, κατά DIN7721 και
µε ηµικυκλικό προφίλ, σχ. 2-9β. Οι ιµάντες αυτού του τύπου ονοµάζονται και HTD -
οδοντωτοί ιµάντες (HTD = High Torque Drive) και χρησιµοποιούνται για την µετάδοση µεγάλων
στρεπτικών ροπών σε χαµηλές ταχύτητες.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
18
α) β)
Σχ. 2-9 Κατανοµή των τάσεων σε οδοντωτό ιµάντα µε α) δόντι τραπεζοειδούς µορφής, β) δόντι
ηµικυκλικής µορφής
Το πλεονέκτηµα των οδοντωτών ιµάντων είναι η σύγχρονη µετάδοση κίνησης και ο σταθερή σχέση
µετάδοσης. Απαιτούν ελάχιστη προένταση και έχουν εποµένως ως αποτέλεσµα µικρή φόρτιση των
ατράκτων. Εξαιτίας της ευκαµψίας τους ο βαθµός απόδοσης είναι πολύ υψηλός (η ≈ 0,99).
Τα µειονεκτήµατα αυτού του τρόπου ιµαντοκίνησης είναι :
ακριβή κατασκευή (ιδιαίτερα των τροχαλιών)
ευαισθησία σε ξένα σώµατα, τα οποία µπορούν να εισχωρήσουν ανάµεσα στα δόντια του
ιµάντα και τα διάκενα της τροχαλίας
θόρυβος κατά την λειτουργία (παράγεται από το κτύπηµα των δοντιών στις αντίστοιχες
επιφάνειες της τροχαλίας)
ευαισθησία σε υπερφόρτιση (δεν έχουν την δυνατότητα ολίσθησης)
Για την οδήγηση του οδοντωτού ιµάντα τοποθετούνται τουλάχιστον δύο στεφάνες σε αντίθετες
πλευρές των δύο τροχαλιών (σχ. 2-8γ) ή και από τις δύο πλευρές της µικρής τροχαλίας.
2.4 Υπολογισµός επίπεδων ιµάντων
Η µεθοδολογία υπολογισµού αναπτύσσεται για τους σύνθετους ιµάντες πολλαπλών στρωµάτων, διότι
από τα διάφορα είδη επίπεδων ιµάντων αυτοί εφαρµόζονται σχεδόν αποκλειστικά στις σύγχρονες
κατασκευές. Θα πρέπει όµως να σηµειωθεί ότι :
η θεωρητική ανάλυση, που ακολουθεί, ισχύει για κάθε τύπο επίπεδων ιµάντων και µε µερικές
τροποποιήσεις και για τους τραπεζοειδείς ιµάντες
ένας ακριβής (στα πλαίσια των αναγκαιοτήτων των πρακτικών εφαρµογών) υπολογισµός του
ιµάντα θα πρέπει να λαµβάνει υπόψη τις ενδεχόµενες ιδιαιτερότητες ενός συγκεκριµµένου ιµάντα και
εδώ απαιτείται η συνδροµή του κατασκευαστή του ιµάντα, ο οποίος πιθανώς έχει αναπτύξει και
ιδιαίτερο τρόπο υπολογισµού.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
19
2.4.1 Θεωρητικά στοιχεία για τον υπολογισµό ιµάντων
∆υνάµεις στην ιµαντοκίνηση
Με µία διάταξη ιµαντοκίνησης µπορεί να µεταδοθεί ισχύς, µόνο όταν η δύναµη τριβής FR ανάµεσα
στον ιµάντα και την τροχαλία είναι ίση ή µεγαλύτερη από την περιφερειακή δύναµη Ft . Θα πρέπει
δηλαδή να ισχύεί :
F F FR N t= ⋅ ≥µ (2.1)
µ : Συντελεστής τριβής, ο οποίος εξαρτάται από τον τύπο του ιµάντα, την επιφάνεια
επαφής της τροχαλίας και πολλαπλώς από την ταχύτητα του ιµάντα. Κάποιες αρχικές τιµές
του µ δίνονται στον πίν. 2-1.
FN : η αναγκαία κάθετη στην περιφέρεια της τροχαλίας δύναµη πίεσης, η οποία πιέζει τον
ιµάντα στην επιφάνεια της τροχαλίας και δηµιουργείται από την προένταση του ιµάντα.
β1
ΕΛΚΟΜΕΝΟΣ ΚΛΑ∆ΟΣ
W
2n
F22F
WF1n , T1
1dF
1F
, T β2
d 2
2
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑΚΙΝΟΥΜΕΝΗ ΤΡΟΧΑΛΙΑ
ΚΛΑ∆ΟΣ ΕΛΞΗΣ
1F
Σχ. 2-10α Ανοικτή διάταξη – αναπτυσσόµενες δυνάµεις

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
20
NRd
FR
R
NF1T
R
,1n
1
ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑ
Σχ. 2-10β ∆υνάµεις στην Τροχαλία
N1β
F2
RF
F
ΜΕ ΤΗΝ ΚΙΝΗΤΗΡΙΑ ΤΡΟΧΑΛΙΑΤΜΗΜΑ ΤΟΥ ΙΜΑΝΤΑ ΣΕ ΕΠΑΦΗ
1F
Σχ. 2-10γ ∆υνάµεις στον Ιµάντα
Εάν η κινητήρια τροχαλία έχει διάµετρο d1 (σχ. 2-10) και στρεπτική ροπή T1 , τότε η περιφερειακή
δύναµη Ft , η οποία θα πρέπει να µεταδοθεί στον ιµάντα είναι F Tdt =⋅2 1
1.
Στους δύο κλάδους του ιµάντα αναπτύσσονται οι δυνάµεις F1 και F2, οι οποίες συνδέονται µε την
δύναµη Ft µε την εξίσωση ισορροπίας ως προς το σηµείο M1
F d F d F dt ⋅ + ⋅ − ⋅ =1
21
11
2 2 20 . Έτσι προκύπτει ότι :
F F Ft = −1 2 (2.2)
Σύµφωνα µε τα παραπάνω, η διάταξη µπορεί να µεταδόσει ισχύ, µόνο όταν η δύναµη F1 (>Ft) στον
κλάδο έλξεως είναι µεγαλύτερη από την δύναµη F2 (<Ft) του ελκόµενου κλάδου. (Αυτή η ‘εκφόρτιση’
του ελκόµενου κλάδου φαίνεται και στην πράξη από κάποια βύθιση - ‘κοιλιά’, που εµφανίζει ο
ελκόµενος κλάδος.
dβ dFN
dβ/2
F
RdF
F+dF
Σχ. 2-10δ ∆υνάµεις σε στοιχειώδες τµήµα του
ιµάντα – Τύπος Eytelwein

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
21
Εάν υποτεθεί, ότι η µετάδοση της δύναµης λαµβάνει χώρα σε όλο το µήκος επαφής του ιµάντα µε την
τροχαλία (που είναι το µήκος του τόξου β1), τότε µπορεί να εφαρµοσθεί ο τύπος του Eytelwein :
FF
e m1
2
1
21= = =⋅σ
σµ β (2.3)
e = 2.718 βάση φυσικών λογαρίθµων
µ συντ. τριβής µεταξύ ιµάντα και τροχαλίας (πίν. 2-1)
β π β1
1180
=⋅ °
° γωνία τύλιξης του ιµάντα στην µικρή τροχαλία [rad]
m σχέση δυνάµεων τάνυσης
σ1, σ2 εφελκυστικές τάσεις στον κλάδο έλξης και στον ελκόµενο κλάδο αντίστοιχα.
Εάν στην σχέση (2.2) αντικατασταθεί η F2 = F1 / m, τότε προκύπτει :
F F Fm
F mm
Ft = − = ⋅−
= ⋅11
1 11 κ (2.4)
όπου η ποσότητα κ =−mm
1 ονοµάζεται συντελεστής εκµετάλλευσης και εξαρτάται από τα µ και β1.
Σηµείωση : Σε µία διάταξη ιµαντοκίνησης η µεταφερόµενη δύναµη αυξάνει µε τη αύξηση του συντ.
εκµετάλλευσης (µεγάλος συντ. τριβής και µεγάλη γωνία τύλιξης).
Κατά την λειτουργία της ιµαντοκίνησης εµφανίζονται στα τµήµατα του ιµάντα, τα οποία διέρχονται
από µία τροχαλία, φυγοκεντρικές δυνάµεις. Αυτές έχουν σαν συνέπεια µία περαιτέρω τάνυση του
ιµάντα αλλά ταυτόχρονα ελάττωση της πίεσης, που ασκεί ο ιµάντας στην τροχαλία. Θα πρέπει δε να
ληφθούν υπόψη στους υπολογισµούς ιδιαίτερα όταν η ταχύτητα κίνησης του ιµάντα είναι µεγάλη. Η
συνισταµένη των δυνάµεων αυτών είναι :
F SZ ≈ ⋅ ⋅ ⋅ −ρ υ2 310 (2.5)
FZ [N] : Φυγοκεντρική δύναµη
S [mm2] : Εµβαδόν διατοµής του ιµάντα
ρ [Kg/mm3] : Πυκνότητα του υλικού του ιµάντα, τιµές συµφωνα µε πίν. 2-1

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
22
υ [m/s] : Ταχύτητα κίνησης του ιµάντα
β1
FZ
Zf
FZK
ZKF
Σχ. 2-10ε Φυγοκεντρικές δυνάµεις
Για να εξασφαλίζεται σε κάθε κατάσταση λειτουργίας η απαραίτητη συνθήκη FR ≥ Ft , θα πρέπει η
πίεση του ιµάντα στην τροχαλία, που προέρχεται από την προένταση να είναι αρκετά υψηλή. Αυτή
δρά ακτινικά στην τροχαλία και φορτίζει εποµένως αντίστοιχα την άτρακτο της τροχαλίας (εποµένως
δεν θα πρέπει να είναι και αναίτια υψηλή). Η συνισταµένη των δυνάµεων πίεσης, που είναι η δύναµη
φόρτισης της ατράκτου FW, µπορεί να υπολογισθεί, όπως φαίνεται στο σχ. 2-10α, (σχ. 2-10β RN και RR
είναι συνιστώσες της FW) και είναι
F F F F FW = + − ⋅ ⋅ ⋅12
22
1 2 12 cosβ . (2.6α)
Αν δε αντικατασταθούν οι F2 = F1 / m και
F1 = Ft ⋅ m / (m-1) τότε προκύπτει :
F Fm m
mk FW t t= ⋅
+ − ⋅ ⋅−
= ⋅2
11 21
cosβ (2.6β)
Η παραπάνω δύναµη φόρτισης της ατράκτου είναι στην κατάσταση λειτουργίας της ιµαντοκίνησης
(και εξασφαλίζει την απαραίτητη δύναµη πίεσης). Στην στάση (ή πριν την έναρξη λειτουργίας) η
φόρτιση της ατράκτου είναι κατά την φυγοκεντρική δύναµη µεγαλύτερη. Έτσι λοιπόν η δύναµη
φόρτισης της ατράκτου σε στάση FWo (η οποία θα πρέπει να ληφθεί υπόψη στον υπολογισµό της
ατράκτου) είναι :
F F F k F FWo W Z t Z= + = ⋅ + (2.6γ)
Ολίσθηση λόγω παραµόρφωσης, ολίσθηση υπερφόρτισης και σχέση µετάδοσης

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
23
Εξαιτίας των διαφορετικών δυνάµεων F1 και F2 , που εφαρµόζονται στον κλάδο έλξης και στον
ελκόµενο κλάδο αντίστοιχα, προκύπτουν διαφορετικές τάσεις σ1 και σ2, οι οποίες µε την σειρά τους
προκαλούν µεταβολή της παραµόρφωσης του ιµάντα. Αυτό σηµαίνει, ότι κατά τη διέλευση του
ιµάντα από την τροχαλία λαµβάνει χώρα µια σχετική κίνηση (του ιµάντα ως προς τη τροχαλία). Το
φαινόµενο αυτό ονοµάζεται ολίσθηση λόγω παραµόρφωσης και εξαρτάται από τις ελαστικές ιδιότητες
του ιµάντα και από την διαφορά των δυνάµεων F1 και F2 .
Εάν κατά την διάρκεια της λειτουργίας συµβεί να ισχύει η συνθήκη Ft > FR , τότε ο ιµάντας ολισθαίνει
συνολικά σε σχέση µε την τροχαλία (δεν µεταδίδεται πλέον ισχύς). Η κατάσταση αυτή ορίζεται ως
ολίσθηση υπερφόρτισης. Επειδή έχει καταστροφικές συνέπειες για τον ιµάντα, θα πρέπει η διάρκεια
της να είναι κατά το δυνατό περιορισµένη.
Ενώ λοιπόν η ολίσθηση υπερφόρτισης είναι µη κανονική κατάσταση, η ολίσθηση λόγω
παραµόρφωσης είναι ένα αναπόφευκτο φαινόµενο συνδεδεµένο µε την λειτουργία της ιµαντοκίνησης.
Έχει σαν συνέπεια την φθορά του ιµάντα και επηρεάζει την σχέση µετάδοσης. Συγκεκριµένα η
περιφερειακή ταχύτητα της κινητήριας τροχαλίας υ π1 1 1= ⋅ ⋅d n είναι κατά τι µεγαλύτερη από την
περιφερειακή ταχύτητα της κινούµενης τροχαλίας υ π2 2 2= ⋅ ⋅d n . Εάν δε ορισθεί ως ολίσθηση λόγω
παραµόρφωσης ψ
( )ψ υ υ υ= − ⋅1 2 2100 / (2.7)
προκύπτει η πραγµατική σχέση µετάδοσης (λαµβάνοντας υπόψη και το πάχος του ιµάντα t, το οποίο
στις συνήθεις εφαρµογές µπορεί να αγνοηθεί) :
i nn
d td t
= =++
⋅−
1
2
2
1
100100 ψ
(2.8)
Όπως ήδη αναφέρθηκε, εάν σε µία εφαρµογή είναι απαραίτητη η διατήρηση µιάς συγκεκριµµένης
σχέσης µετάδοσης µε ακρίβεια (όπως για παράδειγµα η κίνηση του εκκεντροφόρου σε ΜΕΚ), τότε για
την παραπάνω αιτία δεν πρέπει να χρησιµοποιηθούν επίπεδοι ή τραπεζοειδείς ιµάντες αλλά
οδοντωτοί.
Σε όλες τις άλλες περιπτώσεις η σχέση µετάδοσης υπολογίζεται από την σχέση :
i nn
dd
= ≈1
2
2
1 (2.9)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
24
Η σχέση µετάδοσης i στις ιµαντοκινήσεις επιλέγεται από τον παρακάτω πίνακα:
i ≤ 6 για ανοικτές διατάξεις µε επίπεδους ιµάντες
i ≤ 15 όταν υπάρχουν τροχαλίες προέντασης
i ≤ 20 ειδικές περιπτώσεις µε σύνθετους επίπεδους ιµάντες πολαπλών στρωµάτων
i ≤ 15 για διατάξεις µε τραπεζοειδείς ιµάντες
Τα παραπάνω είναι γενικές συστάσεις.
Τάσεις, ελαστική συµπεριφορά
Η µεγαλύτερη φόρτιση του ιµάντα εµφανίζεται στο σηµείο είσοδου του στην µικρή τροχαλία, σχ. 2-
11. Η συνολική τάση σtot στο σηµείο αυτό συντίθεται (µε την προϋπόθεση, ότι το υλικό του ιµάντα
είναι οµογενές και ότι ισχύει πλήρως η σχέση του Eytelwein) από τις εξής επιµέρους τάσεις :
Εφελκυστική τάση σ1
Εµφανίζεται λόγω της δύναµης F1 και είναι :
σκ1
1= =⋅
FS
FS
t (2.10)
Καµπτική τάση σb
Εµφανίζεται στην περιοχή ανάµεσα στην είσοδο του ιµάντα στην τροχαλία και στην έξοδό του απ’
αυτή, καθώς ο ιµάντας κάµπτεται γύρω από την τροχαλία. Είναι δε:
σ εb b b bE E td
= ⋅ ≈ ⋅1
(2.11)
όπου Eb το µέτρο ελαστικότητας σε κάµψη του ιµάντα, τιµές πιν. 2-1
t/d1 Ο λόγος του πάχους του ιµάντα πρός την διάµετρο της µικρής
τροχαλίας.
Συνιστώµενες τιµές δίνονται στον πίν. 2-1. Εάν ληφθούν µεγαλύτερες τιµές, προκύπτει ελάττωση της
διάρκειας ζωής του ιµάντα και της µεταφερόµενης ισχύος.
Τάση λόγω φυγοκεντρικών δυνάµεων σf
Εξαιτίας της αλλαγής της διεύθυνσης της κίνησης του ιµάντα στην τροχαλία, αναπτύσσονται
φυγοκεντρικές δυνάµεις, οι οποίες έχουν συνέπεια αντίστοιχες τάσεις και οι οποίες, ειδικά όταν οι

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
25
ταχύτητες είναι µεγάλες, δεν µπορούν να αγνοηθούν. Η τάση λόγω των φυγοκεντικών δυνάµεων
υπολογίζεται :
σ ρ υfZFS
= = ⋅ ⋅ −2 310 (2.12)
όπου FZ , S, ρ, υ όπως στην εξίσωση (2.5).
Έτσι η συνολική τάση στο σηµείο επαφής της µικρής τροχαλίας και του κλάδου έλξης και ταυτόχρονα
η συνθήκη ελέγχου της αντοχής του ιµάντα είναι :
επσσσσσ ,1 Zfbtot ≤++= (2.13)
όπου σZ,επ η µέγιστη επιτρεπόµενη τάση του ιµάντα, πίν. 2-1
Σε διατάξεις µε στέβλωση του ιµάντα (διασταυρούµενες, γωνιακές κ.λ.π.) αυξάνει η συνολική τάση
κατά την τάση στρέβλωσης σS , η οποία προέρχεται από την επιπρόσθετη επιµήκυνση των ακµών του
ιµάντα. Προσεγγιστικά µπορεί να θεωρηθεί ότι είναι ( )2abES ⋅=σ για διασταυρούµενες διατάξεις
και ( )22
2 adbES ⋅⋅⋅=σ για ηµιδιασταυρούµενες διατάξεις µε απόσταση ατράκτων a σε mm.
Με την χρήση τάσεων στις εξισώσεις (2.2) και (2.4) προκύπτει η έννοια της ωφέλιµης τάσης σΝ, από
την οποία προσδιορίζεται η µέγιστη µεταφερόµενη ισχύς.
σ σ σ σ κN = − = ⋅1 2 1 (2.14)
και αντικαθιστώντας την εξισώση (2.13) στην (2.14) προκύπτει :
( ) κσσσσ επ ⋅−−= fbZN , (2.15)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
26
d
σ b22 σ
σ
ΕΛΚΟΜΕΝΟΣ ΚΛΑ∆ΟΣ
Nf σ
d
n2
n11
b1σ
2
ΚΛΑ∆ΟΣ ΕΛΞΗΣ
Σχ. 2-11 Αναπτυσσόµενες τάσεις σε ανοικτή διάταξη
Μεταφερόµενη ισχύς, βέλτιστη ταχύτητα ιµάντα
Από την γενική σχέση P F= ⋅υ , λαµβάνοντας υπόψη ότι F S b t= ⋅ = ⋅ ⋅σ σ , είναι δυνατός ο
υπολογισµός της µέγιστης ισχύος, που µπορεί να µεταδοθεί. Με την χρήση της ωφέλιµης τάσης από
την εξίσωση (2.15) προκύπτει µεταφερόµενη ισχύς :
3321, 1010 −− ⋅⋅⋅⋅⋅
⋅⋅−
⋅−= υκυρσ επ tbd
tEP bZ (2.16)
όπου
σZ,επ [N/mm2] µέγιστη επιτρεπόµενη τάση του ιµάντα, πίν. 2-1
Eb [N/mm2] µέτρο ελαστικότητας σε κάµψη, πίν 2-1
t [mm] πάχος του ιµάντα
b [mm] πλάτος ιµάντα
ρ [Kg/dm3] πυκνότητα του υλικού του ιµάντα
d1 [mm] διάµετρος της µικρής τροχαλίας
υ [m/s] ταχύτητα του ιµάντα
κ [ - ] συντ. εκµετάλλευσης
Με την βοήθεια της εξίσωσης (2.16) είναι εύκολο να αναγνωρισθεί, ότι αν παραµείνουν τα υπόλοιπα
µεγέθη σταθερά, τότε η µεταφερόµενη ισχύς είναι συνάρτηση της ταχύτητας. Με αυξανόµενη

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
27
ταχύτητα η µεταφερόµενη ισχύς αυξάνει φθάνοντας την οριακή τιµή της, η οποία ονοµάζεται µέγιστη
δυνατή µεταφερόµενη ισχύς Pmax . Η αντίστοιχη τιµή της ταχύτητας ονοµάζεται βέλτιστη ταχύτητα υopt
και δίνεται από την σχέση
υσ
ρoptZ zul bE t
d=
⋅ − ⋅
⋅
10
3
31,
(2.17)
οι µονάδες των διάφορων µεγεθών είναι όπως στην σχέση (2.16)
Με περαιτέρω αύξηση της ταχύτητας γίνεται σηµαντική η επίδραση των φυγοκεντρικών δυνάµεων
και η µεταφερόµενη ισχύς µειώνεται µε τελική τιµή το 0.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
28
2.4.2 Πρακτικός υπολογισµός των επίπεδων ιµάντων τύπου Extremultus 80/85
Ο πρακτικός υπολογισµός των σύνθετων ιµάντων πολλαπλών στρωµάτων, οι οποίοι έχουν και την
µεγαλύτερη σηµασία για τις διάφορες εφαρµογές, βασίζεται στις συστάσεις των κατασκευαστών των
ιµάντων. Αυτός ο τρόπος παραουσιάζεται εδώ στην περίπτωση του ιµάντα Extremultus 80/85.
Σχ. 2-12 Αλγόριθµος επιλογής επίπεδων ιµάντων
Τονίζεται, ότι στην περίπτωση που
πρόκειται να χρησιµοποιηθεί
διαφορετικού τύπου ιµάντας, θα
πρέπει να ληφθούν οδηγίες για τον
υπολογισµό του από τον αντίστοιχο
κατασκευαστή
Επίσης θα πρέπει να γίνει κατανοητό,
ότι ο παρακάτω τρόπος υπολογισµού
ισχύει ακριβώς για ανοιχτές διατάξεις
µε δύο τροχαλίες. Σε διαφορετικές
διατάξεις θα πρέπει επίσης να δοθούν
οδηγίες από τον κατασκευαστή.
Ο τρόπος υπολογισµού µε την µορφή
αλγόριθµου παρουσιάζεται στο σχ. 2-
12 και για τα επιµέρους βήµατα
ισχύουν τα εξής:
Tύπος ιµάντα
Ανάλογα µε τις συνθήκες λειτουργίας
επιλέγεται από τον πίν. 2-2 ο τύπος
του ιµάντα.
∆ιάµετρος τροχαλιών
Εάν οι διάµετροι των τροχαλιών δεν
είναι δεδοµένες, τότε προεπιλέγεται η
διάµετρος της µικρής τροχαλίας από
τον πιν. 2-3 ως συνάρτηση της
µεταφερόµενης ισχύος και των
στροφών.
ΕΝΑΡΞΗ
ΕΠΙΛΟΓΗ ΤΥΠΟΥ ΙΜΑΝΤΑ
ΕΠΙΛΟΓΗ ∆ΙΑΜΕΤΡΟΥ ΤΡΟΧΑΛΙΩΝ
ΕΠΙΛΟΓΗ ΑΡΧΙΚΗΣ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ
ΠΡΟΣ∆ΙΟΡΙΣΜΟΣ ΤΟΥ ΜΗΚΟΥΣ ΤΟΥ ΙΜΑΝΤΑ
ΥΠΟΛΟΓΙΣΜΟΣ ΤΕΛΙΚΗΣ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ
ΕΠΙΛΟΓΗ ΕΙ∆ΙΚΟΥ ΤΥΠΟΥ ΙΜΑΝΤΑ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΥΠΟΛΟΓΙΣΜΟΣ v, fB, FW
ΝΑΙ
ΟΧΙ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΤΕΛΟΣΝΑΙ
ΟΧΙ

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
29
Ακολούθως µε την σχέση (2.9) υπολογίζεται η διάµετρος της µεγάλης τροχαλίας. Για αµφότερες τις
τροχαλίες επιλέγονται τελικά διάµετροι κατά DIN 111 (πίν. 2-7), έτσι ώστε να ισχύει η σχέση i = n1 /
n2 ≈ d1 / d2.
Τύπος Υλικό Κατασκευής ΧρήσειςΣτρώµαέλξης
Στρώµατριβής
Στρώµα κάλυψης
80 LT PA Ch PgΜετάδοση κίνησης σε µίακατεύθυνση Κανονικές συνθήκες και πιθανή
80 LL PA Ch ChΜετάδοση κίνησης και προςτις δύο κατευθύνσεις επίδραση λιπών
85 GT PA E PgΜετάδοση κίνησης σε µία κατεύθυνση Κανονικές συνθήκες και πιθανή
85 GG PA E EΜετάδοση κίνησης και προς τις δύο κατευθύνσεις επίδραση υγρασίας, σκόνης
Πίν. 2-2 Ειδικοί τύποι επίπεδων ιµάντων Extremultus
P/n d P/n d P/n dkW.min mm kW.min mm kW.min mm
0,00075 63 0,008 140 0,14 3150,009 71 0,01 160 0,17 3550,001 80 0,015 180 0,2 400
0,0016 90 0,04 200 0,25 4500,0018 100 0,06 224 0,3 500
0,003 112 0,1 250 0,4 5600,0045 125 0,12 280 0,44 630
Πίν. 2-3 Επιλογή διαµέτρου µικρής τροχαλίας
Απόσταση ατράκτων, Μήκος ιµάντα, Προένταση
Αν η απόσταση των ατράκτων δεν είναι δεδοµένη και η σχέση µετάδοσης είναι i > 1, τότε ο
κατασκευαστής συνιστά την µικρότερη δυνατή απόσταση
( ) 2min 0,1...8,0 da ⋅≈ (2.18)
Αυτή η απόσταση πολλές φορές δεν µπορεί να υλοποιηθεί εξαιτίας των διαστάσεων των µηχανών,
που συνδέονται µε την ιµαντοκίνηση. Γενικά είναι σκόπιµο να επιλέγουµε την αξονική απόσταση
ατράκτων από την σχέση
( ) ( )210,2...7,0 dda +⋅≈ (2.19)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
30
Με την βοήθεια της γωνίας τύλιξης β1 στην µικρή τροχαλία (σχ. 2-10)
⋅−
⋅=add
2arccos2 12
1β (2.20)
προκύπτει το υπολογιστικό µήκος του ιµάντα
( ) ( )121
121
1801
222sin2 ddddaLr −⋅
−⋅++⋅+
⋅⋅=
βππβ (2.21)
Μετά τον επιλογή του πραγµατικού µήκους (παραγγελίας) του ιµάντα L, ακολουθεί ο προσδιορισµός
της πραγµατικής απόστασης των ατράκτων e
( ) ( ) ( )88484
212
2
2121ddddLddLa −
−
+⋅−++⋅−≅′
ππ (2.22)
Για να γίνει δυνατή η µετάδοση της ισχύος, θα πρέπει ο ιµάντας να προενταθεί. Για τον ιµάντα
Extremultus ο κατασκευαστής συνιστά επιµήκυνση 2% για οµαλά φορτία και 3% όταν υπάρχουν
ισχυρά κρουστικά φορτία. Θα πρέπει λοιπόν να προβλεφθεί στην κατασκευή η δυνατότητα αύξησης
της απόστασης των ατράκτων (=µετατόπιση πρόεντασης) sSp σε σχέση µε την υπολογισθείσα τιµή :
2001LsSp ⋅≥ ε (2.23)
όπου ε1, ειδική επιµήκυνση του ιµάντα, σχ. 2-13.
Άν η απόσταση των ατράκτων δεν επιτρέπεται να µεταβληθεί, θα πρέπει να µειωθεί το µήκος
παραγγελίας του ιµάντα σε :
′ = ⋅−L L 100
1001ε (2.23α)
Ειδικός τύπος ιµάντα

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
31
Η επιλογή του ειδικού τύπου του ιµάντα γίνεται από το σχ. 2.13 µε την βοήθεια της διαµέτρου της
τροχαλίας d1 και της γωνίας τύλιξης β1 . Σε οριακές τιµές (που βρίσκονται κοντά σε δύο ειδικούς
τύπους ιµάντα) θα πρέπει ο υπολογισµός να γίνεται και για τους δύο τύπους, η δε οριστική επιλογή να
γίνεται µε βάση τα τελικά αποτελέσµατα.
Περιφερειακή δύναµη
Λαµβάνοντας υπόψη τις δυναµικές συνθήκες λειτουργίας, αφού η στρεπτική ροπή είναι T=P/ω, η
αναγκαία περιφεριακή δύναµη Ft για την µετάδοση συγκεκριµµένη ισχύος P είναι :
11
6101,192 nd
Pcd
TcF BBt ⋅
⋅⋅⋅≅
⋅= (2.24)
cB [ - ] : Συντελεστής συνθηκών λειτουργίας, σχ. 2-32
P [kW] : Η µεταφερόµενη ισχύς
d1 [mm] : ∆ιάµετρος της µικρής τροχαλίας
n1 [rpm] : Στροφές ανά λεπτό της µικρής τροχαλίας
Πλάτος ιµάντα
Με την ειδική περιφερειακή δύναµη ( )F f dt' , ,= 1 1β ιµαντας , σχ. 2-13, προκύπτει το υπολογιστικό
πλάτος του ιµάντα b΄ :
′ =b F Ft t' (2.25)
Ακολούθως από τον πίν. 2.4 επιλέγεται το αµέσως µεγαλύτερο τυποποιηµένο πλάτος b και το
κατάλληλο πλάτος της τροχαλίας B.
Σηµειώνεται, ότι η ειδική περιφερειακή δύναµη µπορεί για τους συγκεκριµένους ιµάντες να υπολογιστεί
προσεγγιστικά και από την σχέση 114' 1095,6 β⋅⋅⋅≅ − dFt .
Πλάτοςιµάντα b 20 25 32 40 50 71 90 112 125Πλάτοςτροχαλίας B 25 32 40 50 63 80 100 125 140Πλάτοςιµάντα b 140 160 180 200 224 250 280 315 355Πλάτοςτροχαλίας B 160 180 200 224 250 280 315 355 400
Πίν. 2-4 Αντιστοίχηση πλάτους ιµάντα - τροχαλίας

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
32
250
F [N
/mm
]
8071
63
10
5
1d [mm]
125 24022020018016014011290224210190170150130120100
' t 30
25
20
15
40
35
Ειδ. Τ. 28
2.2170°
Ειδ. Τ. 10
2.42.22.01.7
300260280
Ειδ. Τ. 20
Ειδ. Τ. 14
2.0
1.82.4
2.2
2.0
1.82.4
2.22.0
120°130°
140°150°
160°
1ε
Ειδ. Τ. 40
1.8
2.41β =180°
130°
d [mm]550
31525
300
30
1
380 420 450 480 520355 400 440 460 500 530
340
40
45
50
35
2.4
1.8
600560 630
2.0
2.2
Ειδ. Τ. 28
120° 1.82.4
2.2
2.0
1.8
Ειδ. Τ. 40
β =180°
70
65
55
60
' tF [N
/mm
]
1
Ειδ. Τ. 80
140°
150°
160°
170°
2.4
2.2
2.0
1ε
Ειδ. Τ. 54
Σχ. 2-13 Ειδική περιφερειακή δύναµη & ειδική επιµήκυνση σε στάση
Συχνότητα καµπτικών εναλλαγών

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
33
Η διάρκεια ζωής του ιµάντα εξαρτάται σε σηµαντικό βαθµό από την συχνότητα καµπτικών
εναλλαγών (υψηλές τιµές συχνότητας καµπτικών εναλλαγών έχουν σαν συνέπεια αύξηση της
θερµοκρασίας του ιµάντα). Μετά τον προσδιορισµό λοιπόν των γεωµετρικών στοιχείων της
ιµαντοκίνησης θα πρέπει να ελεγθεί η συχνότητα καµπτικών εναλλαγών fB :
επυ
,
310BB f
Lzf ≤⋅⋅
= (2.26)
υ [m/s] : ταχύτητα του ιµάντα
z [ - ] : αριθµός τροχαλιών
L [mm] : µήκος (παραγγελία) του ιµάντα
fB,επ [s-1] : µέγιστη επιτρεπόµενη συχν. καµπτικών εναλλαγών, πίν. 2-1.
Φόρτιση ατράκτου
Η δύναµη που λόγω της προέντασης φορτίζει την άτρακτο είναι :
( ) bKFWo ′⋅⋅+= 121 εε (2.27)
ε1 [%] : ειδική επιµήκυνση του ιµάντα στην κατάσταση στάσης, σχ. 2.13
ε2 [%] : ειδική επιµήκυνση του ιµάντα εξαιτίας των φυγοκεντρικών δυνάµεων,
πίν. 2-6
Κ1 [ - ] : συντελεστής ειδικού τύπου ιµάντα, πίν. 2-5
Η δύναµη φόρτισης της ατράκτου, για την ανοικτή διάταξη, για την οποία ισχύει και η σχέση 2-27,
είναι ανεξάρτητη από την στιγµιαία περιφερειακή δύναµη και µπορεί προσεγγιστικά να εκτιµηθεί
Fwo≈(2÷2,5 . Ft ). Η δύναµη αυτή λαµβάνεται υπόψη στον υπολογισµό της ατράκτου.
Συντ. Κ1 10 14 20 28 40 54 80Ον. διαµ. DN 100 140 200 280 400 540 80080 LT 2,2 2,7 3 3,7 4,5 5,7 7,580 LL 3,1 3,6 4 4,8 685 GT 1,7 1,9 2,5 3 3,7 4,6 5,985 GG 1,9 2,1 2,4 2,9 3,5
Πίν. 2-5 Ονοµαστική διάµετρος και πάχη ιµάντων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
34
Ταχύτητα ιµάντα v [m/s] Τύπος ιµάντα
10 20 30 40 50 60 70
GT 10 0,093 0,3 0,6 0,9 GG 10 N 0,7 1,0 LT 10
0,04 0,2 0,4 0,8 1,1
LL 10 0,06 0,3 0,6 1,0 - GT 14 GG 14 N
0,03 0,3 0,5 0,8
LT 14 0,04 0,1
0,4 0,7 1,0 LL 14 0,07 0,3 0,6 1,1 - GT 20 GG 20 N
0,2 0,4 0,7
LT 20 0,03 0,1
0,3 0,6 0,9 LL 20 0,05 0,2 0,5 0,8 -
GT 28 GG 28 N
0,02 0,2 0,4 0,6 0,8
LT 28 0,03 0,1
0,8 1,0 LL 28 0,04 0,2
0,3 0,6 0,9 -
GT 40 GG 40 N
0,2 0,3 0,5 0,7
LT 40 0,02
0,7 0,9 LL 40 0,03
0,3 0,5 0.8 1,1
GT 54 0,2 0,3 0,5 0,7 0,9 LT 54 0,3 0,5 0,7 0,9 1,1 GT 80 0,2 0,3 0,5 0,7 0,9 LT 80
0,02
0,1
0,3 0,5 0,7 0,9 1,1 Πίν. 2-6 Ειδική επιµήκυνση εξαιτίας φυγοκεντρικών δυνάµεων ε2
d 40 50 63 71 80 90 100 112 125 140
Bmin 25 32 40 50 63
Bmax 50 100 140 200
h 0,3 0,4
d 16
0
180 200 224 250 280 315 355 400 450
Bmin 63
Bmax 200 315 400
h 0,5 0,6 0,8 1,0
d 50
0
560 630 710 800 900 100
0
112
0
125
0
140
0
Bmin 63 100 125
Bmax 400
d
h
bB
h 1,0 1,2 1,2* 1.5**
* Για Β>250 : h =1,5. ** Για Β>250 : h = 2,0
Πίν. 2.7 Τροχαλίες επίπεδων ιµάντων – ∆ιαστάσεις κατά DIN 111

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
35

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
36
2.5 Υπολογισµός τραπεζοειδών ιµάντων
Οι τραπεζοειδείς ιµάντες είναι τυποποιηµένα στοιχεία, των οποίων οι διαστάσεις καθορίζονται από
προδιαγραφές (DIN 2215 : Κανονικοί τραπεζοειδείς ιµάντες, DIN 7753 : Στενοί τραπεζοειδείς
ιµάντες). Για την ανοικτή διάταξη ο τρόπος υπολογισµού δίνεται στον αλγόριθµο του σχ. 2-14.
Σχ. 2-14 Αλγόριθµος επιλογής τραπεζοειδών ιµάντων
Είναι τυποποιηµένος τόσο για τους
κανονικούς όσο και για τους στενούς
τραπεζοειδείς ιµάντες (DIN 2218 και
DIN 7753 T1 αντίστοιχα). Αυτός ο
τρόπος υπολογισµού ισχύει γενικά για
τους τραπεζοειδείς ιµάντες αλλά
συνίσταται να χρησιµοποιούνται οι
µεθοδολογίες των κατασκευαστών,
όπου αυτές είναι διαθέσιµες, διότι οι
κατασκευαζόµενοι ιµάντες έχουν σε
πολλές περιπτώσεις µεγαλύτερες
δυνατότητες από τις ελάχιστες, οι
οποίες δίνονται στις προδιαγραφές.
2.5.1 Υπολογισµός γεωµετρικών
στοιχείων ιµαντοκίνησης
Καταρχήν αποφασίζεται η χρήση
κανονικών ή στενών τραπεζοειδών
ιµάντων σύµφωνα και µε τα στοιχεία
του πίν. 2-2. Ακολούθως µε βάση την
ισχύ υπολογισµού P΄=cB . P και τον
αριθµό στροφών της µικρής
τροχαλίας n1 , από το διάγραµµα, σχ.
2-15 (στενοί 2-16) γίνεται η επιλογή
του ειδικού τύπου του ιµάντα.
ΕΝΑΡΞΗ
ΙΣΧΥΣ ΥΠΟΛΟΓΙΣΜΟΥ, ΑΡΙΘΜΟΣ ΣΤΡΟΦΩΝ ΜΙΚΡΗΣ ΤΡΟΧΑΛΙΑΣ
ΕΠΙΛΟΓΗ ΕΙ∆ΙΚΟΥ ΤΥΠΟΥ (∆ιάγραµµα)
ΕΠΙΛΟΓΗ ∆ΙΑΜΕΤΡΟΥ ΜΙΚΡΗΣ ΤΡΟΧΑΛΙΑΣ – ΥΠΟΛΟΓΙΣΜΟΣ ∆ΙΑΜΕΤΡΟΥ ΜΕΓΑΛΗΣ
ΑΡΧΙΚΗ ΕΚΤΙΜΗΣΗ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ - ΥΠΟΛΟΓΙΣΜΟΣ ΤΟΥ ΜΗΚΟΥΣ ΤΟΥ ΙΜΑΝΤΑ
ΕΠΙΛΟΓΗ ΤΥΠΟΠΟΙΗΜΕΝΟΥ ΜΗΚΟΥΣ ΙΜΑΝΤΑ - ΥΠΟΛΟΓΙΣΜΟΣ ΤΕΛΙΚΗΣ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ
ΥΠΟΛΟΓΙΣΜΟΣ ΑΝΑΓΚΑΙΟΥ ΠΛΗΘΟΥΣ ΙΜΑΝΤΩΝ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΕΛΕΓΧΟΣ v, fB, FW
ΝΑΙ
ΟΧΙ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΤΕΛΟΣΝΑΙ
ΟΧΙ

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
37
Στην οριακή περιοχή µεταξύ δύο ειδικών τύπων ιµάντα είναι σκόπιµο να γίνεται ο υπολογισµός µε
ίδια διάµετρο µικρής τροχαλίας και για τον µικρότερο ιµάντα. Θα πρέπει να δίνεται προσοχή στην
ελάχιστη επιτρεπόµενη διάµετρο dmin. Επιλογή µικρότερων τιµών έχει ως συνέπεια σηµαντική
ελάττωση της διάρκειας ζωής του ιµάντα. Οι σχέσεις, που ακολουθούν, δίνονται για του κανονικούς
τραπεζοειδείς ιµάντες, ο υπολογισµός των οποίων βασίζεται στην λεγόµενη ενεργή διάµετρο της
τροχαλίας dw, DIN 2211T (πίν. 2-8). Οι ίδιες σχέσεις ισχύουν και για τους κανονικούς τραπεζοειδείς
ιµάντες, όπου όµως χρησιµοποιείται η λεγόµενη κανονική διάµετρος της τροχαλίας dr , DIN 2217 T1
(πίν. 2-9).
d =
80 έως 1
00
d =
50 έως 7
1
13
d =
112 έως
140
d =
80 έως 1
00
3.15
Αριθµός
στροφ
ών
µικρής
τροχαλίας
1.0 1.6 2.52.01.250.8
200
160
125
100
w1
w1w1
n [m
in
]-1
1600
1250
1000
800
630
500
400
315
250
d =
450 έως
500
d =
355 έως
400
d =
250 έως
355
w1
160ΙΣΧΥΣ ΥΠΟΛΟΓΙΣΜΟΥ
w1
w1
'P [kW]6.3 10.0 16.0 25.0 40.0 63.0 1004.0
12580.050.031.520.012.58.05.0250
200
40
d =
200 έως
315
w1w1d =
160 έως
280w1 w1d =
125 έως
140 22 3217
10
5000
4000
3150
2500
2000
Σχ. 2-15 ∆ιάγραµµα επιλογής κανονικών τραπεζοειδών ιµάντων
SPA
ΙΣΧΥΣ ΥΠΟΛΟΓΙΣΜΟΥ
Αριθµός
στροφ
ών
µικρής
τροχαλίας
15108.06.03.0 4.0
400
300
200
r1d = 63 έως 180SPZ
-1n
[min
]
4000
3000
2000
1500
1000
800
600
19
3002001501008060403020
r1d = 224 έως 630
SPC
P [kW]'
r1d =
180 έως
500
r1d = 140 έως 400r1d =
90 έως 2
50 SPB
Σχ. 2.16 ∆ιάγραµµα επιλογής στενών τραπεζοειδών ιµάντων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
38
DIN Ονοµασία 6 10 13 17 22 32 40 Ειδικός τύ- πος ιµάντα
ISO Ονοµασία Y Z A B C D E Πλάτος στην πάνω πλευρά b0 ≈
6
10
13
17
22
32
40
Ενεργό πλάτος bW ≈ 5,3 8,5 11 14 19 27 32 Ύψος ιµάντα h ≈ 4 6 8 11 14 20 25 Απόσταση hW ≈ 1,6 2,5 3,3 4,2 5,7 8,1 12 Εσωτερικό µήκος δια-βαθµισµένο σύµφωνα µε την σειρά R20, DIN 323
185 έως 850
300 έως 2800
560 έως 5300
670 έως 7100
1180 έως 18000
2000 έως 18000
3000 έως 18000
Ονοµαστικό µήκος LWN 319 824 1732 2282 3811 6380 7184
ΙΜΑΝΤΕ
Σ
∆ιαφορά µήκους ∆L = LW-Li
15
22
30
43
52
75
82
Ενεργό πλάτος bW 5,3 27 32 Πλάτος αυλακώσεων b1 ≈ 6,3 32 40
c 1,6 8,1 12 e 8±0,3 38±0,6 44,5±0,7 f 6±0,5 24±2 29±2 t 7±0,6 28+0,6 33+0,6
Max. αριθµός αυλακώσεων z
7
12
12
Min. ενεργή διάµ. τρο dW,min
28
355
500
Max. ενεργή διάµ. τροχ. dW,max
125
> 2000
> 2000
Γωνία αυλακ. α =32°, dW ≤ 63 - - Γωνία αυλακ. α =34°, dW - - - Γωνία αυλακ. α =36°, dW > 63 ≤ 500 ≤ 630 Γωνία αυλακ. α =38°, dW -
Για ιµαντοκινήσεις µε αυτούς τους ειδικούς τύπους χρησιµοποιούνται οι ίδιες Τροχαλίες, µε αυτές των στενών τραπεζοειδών ιµάντων κατά DIN 2211 T1
>500 >630
ΤΡΟΧΑ
ΛΙΕΣ
∆ιαβάθµ. ενεργής διαµ. dW σύµφωνα µε την σειρά R20, DIN 323
στρογγυλεµένες ακµές
d
f f
b
b
h t
w
w
b
h0
w
c
b w1
α
fe
fe
Πίν. 2-8 ΚΑΝΟΝΙΚΟΙ ΤΡΑΠΕΖΟΕΙ∆ΕΙΣ ΙΜΑΝΤΕΣ κατά DIN 2215 και ΤΡΟΧΑΛΙΕΣ κατά DIN 2217

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
39
Ειδικός τύπος ιµάντα
ISO Ονοµασία SPZ SPA SPB SPC
Πλάτος στην πάνω πλευρά b0 ≈
9,7
12,7
16,3
22
Ενεργό πλάτος bW ≈ 8,5 11 14 19 Ύψος ιµάντα h ≈ 8 10 13 18 Απόσταση hW ≈ 2 2,8 3,5 4,5 Ενεργό µήκος δια-βαθµισµένο σύµφωνα µε την σειρά R20, DIN 323
630 έως 3550
800 έως 4500
1250 έως 8000
2000 έως
12500
ΙΜΑΝΤΕ
Σ
Ονοµαστικό µήκος LWN 1600 2500 3550 5600 Στενοί κατά DIN 7753 SPZ SPA SPB SPC Κανονικοί κατά DIN 2215 10 13 17 22 Z A B C Ενεργό πλάτος br 8,5 11 14 19 Πλάτος αυλακώσεων b1 ≈ 9,7 12,7 16,3 22
c 2 2,8 3,5 4,8 e 12±0,3 15±0,3 19±0,4 25,5±0,5 f 8±0,6 10±0,6 12,5±0,8 17±1 t 11+0,6 14+0,6 18+0,6 24+0,6
Max. αριθµός αυλακώσεων z
12
12
12
12
Min. ενεργή διάµ. τροχ. dr,min
63
50
90
71
140
112
224
180
Max. ενεργή διάµ. τροχ. dr,max
710
1000
1600
2000
ΤΡΟΧΑ
ΛΙΕΣ
Γωνία αυλακ. α =34°, dr ≤ 80 ≤ 118 ≤ 190 ≤ 315 Γωνία αυλακ. α =38°, dr > 80 > 118 > 190 > 315 ∆ιαβάθµ. ενεργής διαµ. dr σύµφωνα µε την σειρά R20, DIN 323
th
b d
στρογγυλεµένες ακµές
w
r
b 1bff
h0
w
c
rb
α
fe
fe
Πίν. 2-9 ΣΤΕΝΟΙ ΤΡΑΠΕΖΟΕΙ∆ΕΙΣ ΙΜΑΝΤΕΣ κατά DIN 7753 και ΤΡΟΧΑΛΙΕΣ κατά DIN 2211

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
40
Η απόσταση ατράκτων, στην περίπτωση που δεν δίδεται, συνίσταται να επιλέγεται στην περιοχή :
( ) ( )212...7,0 ww dda +⋅≈ (2.28)
Το ενεργό µήκος του ιµάντα είναι προσεγγιστικά :
( ) ( )add
ddaL wwwwwr ⋅
−++⋅+⋅≈
422
212
21π
(2.29)
Με την βοήθεια της γωνίας τύλιξης στην µικρή τροχαλία
⋅−
⋅=add ww
2arccos2 12
1β (2.30)
υπολογίζεται ακριβώς το ενεργό µήκος του ιµάντα
( ) ( )121
211
1801
222sin2 wwwwwr ddddaL −⋅
−⋅++⋅+
⋅⋅=
βππβ (2.31)
Τα µήκη των ιµάντων είναι τυποποιηµένα (πίν. 2-8 και πίν. 2-9) και για τους στενούς τραπεζοειδείς
ιµάντες δίδεται προς παραγγελία το πλησιέστερο προς το ενεργό τυποποιηµένο µήκος. Στους
κανονικούς τραπεζοειδείς ιµάντες τυποποιηµένο είναι το εσωτερικό µήκος Li το οποίο υπολογίζεται
από το ενεργό µε την σχέση
L L Li w= − ∆ (2.32)
∆L από πίν. 2-8
Με το τυποποιηµένο µήκος, που έχει τελικά επιλεγεί, υπολογίζεται προσεγγιστικά η αντίστοιχη
απόσταση ατράκτων
( ) ( ) ( )212
2
2121 224
124
1wwwwwwww ddddLddLa −⋅−
+⋅−⋅+
+⋅−⋅≈′
ππ (2.33)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
41
Για την τοποθέτηση του ιµάντα θα πρέπει να προβλεφθεί η δυνατότητα µείωσης της απόστασης των
ατράκτων κατά
s LV w≥ ⋅0 015, . (2.34)
Για την προένταση του ιµάντα θα πρέπει να υπάρχει η δυνατότητα αύξησης της απόστασης των
ατράκτων κατά
s LSp w≥ ⋅0 03, . (2.35)
2.5.2 Υπολογισµός ισχύος, δυνάµεων
Κανονικοί τραπεζοειδείς ιµάντες
Για την ασφαλή µετάδοση της ισχύος υπογισµού P΄ = cB . P υπολογίζεται το πλήθος των ιµάντων που
πρέπει να χρησιµοποιηθούν
21 ccPPc
zN
B⋅⋅
⋅≥ (2.36)
c1 : Συντελεστής διόρθωσης γωνίας τύλιξης µικρής τροχαλίας, σχ. 2-17α
c2 : Συντελεστής διόρθωσης µήκους, σχ. 2-17β
PN : Ονοµαστική ισχύς ενός ιµάντα [kW], σχ. 2-18
Γωνία
τύλιξης β1
Συντελεστής
c1
Γωνία
τύλιξης β1
Συντελεστής
c1
180 1 120 0,82
170 0,98 110 0,78
160 0,95 100 0,74
150 0,92 90 0,69
140 0,89 80 0,64
130 0,86 70 0,58
Σχ. 2-17α Συντελεστής
γωνίας τύλιξης c1
Μπορεί να υπολογισθεί και από
την σχέση
( )[ ]180/1 15125,1 β−−⋅≅c

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
42
112ywLxc ⋅≅
Ειδικός
τύπος
x1 y1
6 0,283 0,219
10 0,231 0,22
17 0,191 0,214
22 0,174 0,213 L [m]
3
1.0
WΕνεργό µήκος ιµάντα
2c 0.9
0.80.7
210.80.60.40.30.2
17
1.3
1.2
1.1106
10 1412864
22
Σχ. 2-17β Συντελεστής µήκους c2
6
n [min ]-1Αριθµός στροφών µικρής τροχαλίας
Ονο
µαστική ισχύς
0,06
800
0,050,04
0,03
0,02
0,0120001000600400300200100 60004000
d = 31,5
d = 28
w1
P
[kW
]N
0,4
0,2
0,10,08
w1d
= 40
w1w1d
= 50
Ενεργή
διάµετρος
µικρής
τροχαλίας
w1d = 63
0,8
0,6
P
[kW
]
d = 63
Ενεργή
διάµετρος
µικρής
τροχαλίας
Αριθµός στροφών µικρής τροχαλίας
400200100
NΟνο
µαστική ισχύς
0,50,40,3
0,2
0,10,08
0,054000800
600020001000600
n [min ]-1
w1d = 50
w1
2,0
1,00,8
10d
= 80
w1
w1d = 100
0,4
n [min ]-1Αριθµός στροφών µικρής τροχαλίας
20001000800600400200100 60004000
P
[kW
]
Ενεργή διάµετρος
µικρής
τροχαλίας
NΟνο
µαστική ισχύς
3,0
2,0
1,00,8
0,6
w1d = 125
8,0
6,0
4,0 d = 160
w1
d = 200
w1w1d =
25017
800300020001000600400300200100
Αριθµός στροφών µικρής τροχαλίας n [min ]-1
Ενεργ
ή διάµετρος
µικρής τροχαλίας
P
[kW
]Ονο
µαστική ισχύς
N 6,0
4,0
2,0
1,0
15,0
10,08,0
22
d = 250
w1
d = 250
w1
w1d = 315w1d = 400
Σχ. 2-18 Ονοµαστική ισχύς κανονικών τραπεζοειδών ιµάντων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
43
Στενοί τραπεζοειδείς ιµάντες
Εδώ το πλήθος των ιµάντων που πρέπει να χρησιµοποιηθούν υπολογίζεται από
z c PP c c
B
N≥
⋅⋅ ⋅1 3
(2.37)
c1 : Συντελεστής διόρθωσης γωνίας τύλιξης µικρής τροχαλίας, πίν. 2-17α
c3 : Συντελεστής διόρθωσης µήκους, πίν. 2-19
PN : Ονοµαστική ισχύς ενός ιµάντα [kW], σχ. 2-20
223ywLxc ⋅≅
Ειδικός
τύπος
x2 y2
SPZ 0,248 0,187
SPA 0,258 0,173
SPB 0,232 0,178
SPC 0,213 0,179
1,0 SPCSPZ SPA
Ενεργό µήκος ιµάντα0,8
0,70,8
0,9
3c
0,60,40,30,2 1
WL [m]
14104 86 122 3
1,1
1,2
1,3
SPB
Σχ. 2-19 Συντελεστής µήκους c3
Αν από τον υπολογισµό προκύψουν πολλοί ιµάντες θα πρέπει να εξεταστεί και το ενδεχόµενο να
χρησιµοποιηθούν επίπεδοι ιµάντες ή τραπεζοειδείς ιµάντες µε πτερύγια.
Σε ένα τελευταίο βήµα θα πρέπει να ελεγθεί η συχνότητα καµπτικών εναλλαγών
fLB
w=
⋅2 υ (2.38)
και η ταχύτητα
6011 nd w ⋅⋅
=π
υ (2.38α)
οι οποίες δεν θα πρέπει να υπερβαίνει τις αντίστοιχες µέγιστες επιτρεπόµενες τιµές, πίν. 2-2.
Στους τραπεζοειδείς ιµάντες η φόρτιση της ατράκτου είναι (µικρότερη από αυτή των επίπεδων) FW ≈
(1,5 έως 2) . Ft , η δε δύναµη Ft υπολογίζεται όπως στους επίπεδους ιµάντες.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
44
Ονο
µαστική ισχύς
0,6
Αριθµός στροφών µικρής τροχαλίας
1000
0,50,4
0,3
0,2
800600400200100
n [min ]-1600040002000
d =
160
NP
[kW
]SPZ
Ενεργή
διάµετρος
µικρής
τροχαλίας
9,07,06,05,04,0
3,0
2,0
1,5
1,00,8
d = 63
r1
d = 80
r1
d =
100
r1d
= 12
5
r1
r1
Αριθµός στροφών µικρής τροχαλίας
SPA
Ενεργή
διάµετρος
µικρής
τροχαλίας
Ονο
µαστική ισχύς
0,80,6
0,4
100
NP
[kW
]
20,015,0
10,08,06,0
4,03,0
2,01,5
1,0
n [min ]-14000
600020001000800
600400200
d =
100
r1
d =
125
r1
d =
160
r1
d =
200
r1
r1d = 250
d = 25
0d
= 315
Ενεργή
διάµετρος
µικρής
τροχαλίας
Αριθµός στροφών µικρής τροχαλίας
1000
d = 14
0d = 20
0
Ονο
µαστική ισχύς
P
[kW
]N
10,08,0
6,0
4,0
3,0
2,0
1,5
1,0
800600400200100
r1
r1
r1r1
-1n [min ]6000
40002000
d = 400
r1
30,0
20,0
15,0SPB
µικρής τροχαλίας
Αριθµός στροφών µικρής τροχαλίας
Ονο
µαστική ισχύς 10,0
8,0
6,05,04,0
3,0
2,0100
n [min ]-1800
400020001000600400200
SPCNP
[kW
]40,0
30,0
20,0
15,0d =
250
r1
d = 315
r1d =
400
r1
r1d = 500
Ενεργή
διάµετρος
r1d = 630
Σχ. 2-20 Ονοµαστική ισχύς στενών τραπεζοειδών ιµάντων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
45
2.6 Υπολογισµός τραπεζοειδών ιµάντων µε πτερύγια
Ο υπολογισµός των τραπεζοειδών ιµάντων µε πτερύγια (οι οποίοι περιγράφονται στο DIN 7867) δεν
είναι τυποποιηµένος. Συνίσταται να ακολουθούνται οι τρόποι υπολογισµού, που προτείνουν οι
διάφοροι κατασκευαστές. Γενικά όµως και στην περίπτωση που δεν υπάρχουν αντίστοιχες
πληροφορίες από τον κατασκευαστή του ιµάντα, µπορεί να ακολουθηθεί η υπολογιστική διαδικασία,
Σχ. 2-21 Αλγόριθµος επιλογής τραπεζοειδών ιµάντων µε
πτερύγια
που περιγράφεται στο σχ. 2-21.
2.6.1 Υπολογισµός γεωµετρικών
στοιχείων ιµαντοκίνησης
Η µεθοδολογία υπολογισµού καθώς
και οι σχέσεις, που δίνονται
παρακάτω, ισχύουν κατά βάση για
την ανοικτή διάταξη του σχ. 2-1α.
Η επιλογή του κατάλληλου ιµάντα
γίνεται και πάλι µε παραµέτρους την
ισχύ υπολογισµού P΄= cB . P και τον
αριθµό στροφών της µικρής
τροχαλίας n1 , από το διάγραµµα 2-22.
Σε οριακές περιπτώσεις ανάµεσα σε
δύο γειτονικά προφίλ, θα πρέπει
αρχικά να γίνεται ο υπολογισµός για
το µικρότερο, διότι αυτό θα οδηγήσει
σε κατασκευή µικρότερου όγκου.
Οι διάµετροι αναφοράς dB των
τροχαλιών για τους ιµάντες αυτού του
τύπου επιλέγονται από τον πίν. 2-10,
έτσι ώστε να υλοποιείται - κατά το
δυνατό ακριβώς - η επιθυµητή σχέση
µετάδοσης
i = n1 / n2 y db2 / db1 y dw2 / dw1.
ΕΝΑΡΞΗ
ΙΣΧΥΣ ΥΠΟΛΟΓΙΣΜΟΥ, ΑΡΙΘΜΟΣ ΣΤΡΟΦΩΝ ΜΙΚΡΗΣ ΤΡΟΧΑΛΙΑΣ
ΕΠΙΛΟΓΗ ΕΙ∆ΙΚΟΥ ΤΥΠΟΥ (∆ιάγραµµα)
ΕΠΙΛΟΓΗ ∆ΙΑΜΕΤΡΟΥ ΜΙΚΡΗΣ ΤΡΟΧΑΛΙΑΣ – ΥΠΟΛΟΓΙΣΜΟΣ ∆ΙΑΜΕΤΡΟΥ ΜΕΓΑΛΗΣ
ΑΡΧΙΚΗ ΕΚΤΙΜΗΣΗ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ - ΥΠΟΛΟΓΙΣΜΟΣ ΤΟΥ ΜΗΚΟΥΣ ΤΟΥ ΙΜΑΝΤΑ
ΕΠΙΛΟΓΗ ΤΥΠΟΠΟΙΗΜΕΝΟΥ ΜΗΚΟΥΣ ΙΜΑΝΤΑ - ΥΠΟΛΟΓΙΣΜΟΣ ΤΕΛΙΚΗΣ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ
ΥΠΟΛΟΓΙΣΜΟΣ ΑΝΑΓΚΑΙΟΥ ΠΛΗΘΟΥΣ ΠΤΕΡΥΓΙΩΝ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΕΛΕΓΧΟΣ v, fB, FW
ΝΑΙ
ΟΧΙ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΤΕΛΟΣΝΑΙ
ΟΧΙ

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
46
310
Αριθµός
στροφ
ών
µικρής
τροχαλίας
PM
100
160
250
'P [kW]ΙΣΧΥΣ ΥΠΟΛΟΓΙΣΜΟΥ4,02,01,00,50,2 17080402010
n [m
in
]-1
5700
3450
2100
1300
450
750
PJ
PL
Σχ. 2-22 ∆ιάγραµµα επιλογής
τραπεζοειδών ιµάντων µε πτερύγια
Θα πρέπει βέβαια, πάντοτε, να λαµβάνεται υπόψη η ελάχιστη επιτρεπόµενη διάµετρος dbmin, η οποία
αναφέρεται στον πίν. 2-10. Θα πρέπει ακόµη να είναι γνωστό, ότι η επιλογή µικρών διαµέτρων
οδηγεί σε ιµάντες µε πολλά πτερύγια. Αυτό πάλι έχει ως συνέπεια να απαιτούνται τροχαλίες µε
µεγαλύτερο πλάτος.
Η απόσταση ατράκτων, στην περίπτωση που δεν δίδεται, συνίσταται να επιλέγεται στην περιοχή :
( ) ( )212...7,0 bb dda +⋅≈ (2.39)
Το ενεργό µήκος του ιµάντα είναι προσεγγιστικά :
( ) ( )add
ddaL bbbbbr ⋅
−++⋅+⋅≈
422
212
21π
(2.40)
Επειδή τα µήκη αυτού του τύπου των ιµάντων είναι τυποποιηµένα (πίν. 2-11), επιλέγεται το
πλησιέστερο στο αποτέλεσµα της παραπάνω σχέσης τυποποιηµένο µήκος Lb. Με βάση αυτό
προκύπτει η τελική απόσταση ατράκτων :
α) προσεγγιστικά
bbrbbr
brbbrb
LLLL
aa
LLLL
aa
>−
+≈′
>−
+≈′
οταν
οταν
,2
,2 (2.41)
β) ακριβέστερα
( ) ( ) ( )84
2/4
2/ 212
22121 bbbbbbbb ddddLddL
a−
−
+⋅−+
+⋅−=′
ππ (2.42)
Ι Ειδικός Τύπος PH PJ* PK PL* PM*

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
47
Απόσταση πτερυγίων s 1,6±0,2 2,34±0,2 3,56±0,2 4,7±0,2 9,4±0,2
Ύψος ιµάντα hmax1) 3 4 6 10 17
Πλήθος πτερυγίων z 2) 2 …31 2 …50 2 …50 2 …60 2 …45
Πλάτος ιµάντα b b = s . z
Ακτίνα ποδός rg max 0,15 0,20 0,25 0,40 0,75
Ακτίνα κεφαλής rk min 0,30 0,40 0,50 0,40 0,75
Min 559 330 559 954 2286 Τυποποιηµένο µήκος
Lb 2) Max 2155 2489 3492 6096 15266
Επιτρεπόµενη ταχύτητα vmax2) 60 m/s 50 m/s 50 m/s 40 m/s 30 m/s
Συντοµογραφία H J K L M Απόσταση αυλάκων e 1,6±0,0
3
2,34±0,0
3
3,56±0,0
5
4,7±0,0
5
9,4±0,0
8
Συνολική απόσταση c c=(πλήθος πτερυγίων -1).e Ανοχές για c =±0,30
∆ιάµετρος αναφοράς db min 13 20 45 75 180
Τυποποίηση Κατά την σειρά αριθµών R 20
Εσωτερική ακτίνα ri max 0,30 0,40 0,50 0,40 0,75
Εξωτερική ακτίνα ra min 0,15 0,20 0,25 0,40 0,75
Βάθος tmin 1,33 2,06 3,45 4,92 10,03
Απόσταση από άκρη fmin 1,3 1,8 2,5 3,3 6,4
Ενεργή διάµετρος dw dw = db + 2.hb
ΤΡΟΧΑ
ΛΙΕΣ
ΚΑΤΑ
DIN
786
7
Ύψος αναφοράς hb 0,8 1,25 1,6 3,5 6,4
* Να προτιµώνται 1), 2) Σύµφωνα µε τον κατασκευαστή
t
h
C
fe
d
d b
w BA
h
s
BfP
R Af
b
r
40 0,5
r
oo±
i
a
r k
gr
Πίν. 2-10 Τραπεζοειδείς ιµάντες µε πτερύγια και αντίστοιχες τροχαλίες κατά DIN 7867

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
48
Ειδικός τύπος PJ Ειδικός τύπος PL Ειδικός τύπος PM
Lb c2 sSp sV Lb c2 sSp sV Lb c2 sSp sV
330 0,76 954 0,83 2286 0,87
356 0,78 991 0,84 15
2388 0,88 30
381 0,79 1075 0,86 2515 0,89
406 0,80 1270 0,89 2693 0,91
432 0,82 1371 2832
457 0,83 1397 2921 0,92
35
40
483 0,84
10 10
1422
0,91
20
3010 0,93
508 0,85 1562 0,93 3124 0,94
559 0,87 1664 3327 0,95
610 0,89 1715
0,95
3531 0,96
660 0,90 1764 0,96 3734 0,98
45
711 0,92 1841 0,97 4089
762 0,93 1943 4191 1,0
813 0,95 19810,98
25
4470 1,01
864 0,96 2070 0,99 4648 1,02
55
45
914 0,97 2096 5029 1,04
965 0,98
15
21341,0
5410 1,06 65 50
1016 1,0 2197 1,01 6121 1,08
1092 1,01 2324 1,02 6883 1,11 85 55
1123 1,02 2476
30
25
7646 1,13
1168 1,03 25151,03
8408 1,16 100 60
1244 1,04 2705 1,05 9169 1,18
1285 2845 1,06 9931 1,19 115 65
1321 1,05 2921 1,07
35
1069
3
1,21 130 75
1397 1,06 3086 1,08 1221
7
1,24 150 80
1473 1,08
20
3289 1,09 1374
1
1,27
1549 1,09 3327 1,10 1526
6
1,30 165 90
1651 1,10 3696 1,12
45
30
1752 1,12 4051 1,14
1854 1,13 4191 1,15
1956 1,14
25
15
4470 1,16
2083 1,16 4622 1,17
55
2210 1,17
30 20
5029 1,19 65
35

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
49
2337 1,18 5385 1,21
2489 1,20
6096 1,24 85
Πίν. 2-11 Τραπεζοειδείς ιµάντες µε πτερύγια – Τυποποιηµένα µήκη, συντελεστής µήκους c2, απόσταση
τάνυσης ssp, απόσταση τοποθέτησης sv
Για την τοποθέτηση του ιµάντα θα πρέπει να είναι δυνατή η ελάττωση της απόστασης των ατράκτων
κατά sV και για την προένταση η αύξηση της αξονικής απόστασης κατά sSp. Και για τα δύο µεγέθη
δίνονται συστάσεις στον πίν. 2-11, αλλά για ακόµη µία φορά, σηµειώνεται, ότι εδώ θα πρέπει να
ακολουθούνται οι υποδείξεις των κατασκευαστών.
Η γωνία τύλιξης στην µικρή τροχαλία είναι
⋅−
⋅=add bb
2arccos2 12
1β (2.43)
και για έλεγχο µπορεί να υπολογιστεί ακριβώς το ενεργό µήκος του ιµάντα
( ) ( )121
211
1801
222sin2 bbbbbr ddddaL −⋅
−⋅++⋅+
⋅⋅=
βππβ (2.44)
Η ταχύτητα του ιµάντα υ ανειγµένη στην ενεργή ζώνη (πιν. 2-10) είναι :
( )υ =⋅
=+ ⋅ ⋅d n d h nw b b1 1 1 1
191002
19100 (2.45)
dw1 [mm] : ενεργή διάµετρος της µικρής τροχαλίας
db1 [mm] : διάµετρος αναφοράς της µικρής τροχαλίας
hb [mm] : Υψος αναφοράς, πίν. 2-10
n1 [rpm] : αριθµός στροφών της µικρής τροχαλίας
και δεν επιτρέπεται να ξεπερνά τις τιµές του πίν. 2-10.
2.6.2 Υπολογισµός ισχύος, δυνάµεων
Η ονοµαστική ισχύς PN ανά πτερύγιο µπορεί µε βάση τα db1, n1 και i να ληφθεί από τον πίν. 2-13. Στην
περίπτωση που i ≠ 1, η ονοµαστική ισχύς διαφοροποιείται κατά το ποσό UZ (Προσαύξηση σχέσης
µετάδοσης, πίν. 2-13), ενώ η επίδραση της γωνίας τύλιξης β1 και του µήκους Lb λαµβάνονται υπόψη
µε τους συντελεστές c1 (πίν. 2-12) και c2 (πίν. 2-11) αντίστοιχα. Ο απαραίτητος αριθµός πτερυγίων z
υπολογίζεται τότε από :

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
50
( )z P c
P U c cB
N Z=
⋅+ ⋅ ⋅1 2
(2.46)
Γωνία τύλιξης β1 180 170 160 150 140 130 120 110 100 90 80 70
Συντ. γων.τύλιξης c1 1,0 0,99 0,99 0,98 0,97 0,95 0,93 0,91 0,89 0,86 0,83 0,8
Πίν. 2.12 Συντελεστής γωνίας τύλιξης
Σύµφωνα µε την Optibelt (κατασκευαστής ιµάντων) κατά την λειτουργία η δύναµη F1 στον κλάδο
έλξης είναι
F P cc
B1
1
1030=
⋅ ⋅⋅υ
(2.47)
και η δύναµη F2 στον ελκόµενο κλάδο
( )Fc P c
cB
21
1
1000 1 03=
⋅ − ⋅ ⋅⋅
,υ
(2.48)
P [kW], υ [m/s], F [N]
Με την βοήθεια των παραπάνω δυνάµεων µπορεί να υπολογιστή η φόρτιση της ατράκτου της
τροχαλίας 1 κατά την λειτουργία :
F F F F Fw1 12
22
1 2 12= + − ⋅ ⋅ ⋅ cosβ (2.49)
Στην άτρακτο της τροχαλίας 2 δρά ίση και αντίθετη δύναµη.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
51
Αριθµός στροφών µικρής τροχαλίας n1 [min-1]
100 300 599 700 950 1450 2850
180 0,79 2,0 3,07 4,04 5,16 7,1 10,16
190 0,85 2,17 3,33 4,4 5,62 7,74 10,98
200 0,91 2,33 3,59 4,75 6,07 8,36 11,74
224 1,06 2,73 4,21 5,58 7,15 9,82 13,34
250 1,21 3,15 4,88 6,46 8,28 11,34 14,65
280 1,39 3,63 5,63 7,47 9,56 13,0 15,59
315 1,6 4,18 6,5 8,62 11,0 14,8 15,89
355 1,83 4,81 7,47 9,90 12,59 16,68
400 2,09 5,5 8,55 11,29 14,29 18,53
450 2,37 6,26 9,72 12,79 16,06 20,23
500 2,64 7,01 10,86 14,23 17,71 21,52
560 2,99 7,9 12,19 15,88 19,51 22,48
630 3,37 8,91 13,69 17,69 21,33 22,71
710 3,81 10,05 15,34 19,58 23,03
800 4,29 11,3 17,09 21,47 24,39
∆ιά
µετρος
αναφο
ράς της
µικρής
τροχαλίας
d b1 [
mm
]
1000 5,35 13,95 20,59 24,68 25,02
1,01 …1,05 0,01 0,02 0,04 0,06 0,08 0,12 0,24
1,06 …1,26 0,03 0,1 0,17 0,24 0,33 0,5 0,98
1,27 …1,57 0,05 0,14 0,23 0,33 0,45 0,68 1,34
Προσα
ύξησ
η
Üz [
kW]
για
i
> 1,57 0,06 0,18 0,3 0,42 0,56 0,86 1,69
Πίν. 2-13α Ονοµαστική ισχύς PN [kW] ανά πτερύγιο για ιµάντες PM

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
52
Αριθµός στροφών µικρής τροχαλίας n1 [min-1]
100 300 500 700 950 1450 2850
75 0,11 0,27 0,42 0,56 0,73 1,04 1,79
80 0,11 0,29 0,45 0,6 0,78 1,12 1,93
90 0,13 0,34 0,53 0,71 0,92 1,32 2,29
100 0,15 0,39 0,61 0,81 1,06 1,51 2,64
112 0,17 0,45 0,7 0,94 1,22 1,75 3,05
125 0,19 0,51 0,8 1,07 1,39 2,0 3,48
140 0,22 0,58 0,91 1,22 1,59 2,28 3,95
160 0,25 0,67 1,05 1,41 1,85 2,66 4,56
180 0,29 0,76 1,2 1,61 2,1 3,02 5,13
200 0,32 0,85 1,34 1,8 2,35 3,38 5,66
224 0,36 0,96 1,51 2,03 2,65 3,79 6,24
250 0,4 1,07 1,69 2,27 2,97 4,23 6,8
280 0,45 1,2 1,9 2,55 3,32 4,72 7,33
315 0,51 1,35 2,14 2,87 3,73 5,26 7,8
355 0,57 1,53 2,4 3,23 4,19 5,85 8,1
∆ιά
µετρος
αναφο
ράς της
µικρής
τροχαλίας
d b1 [
mm
]
400 0,64 1,72 2,7 3,62 4,68 6,46 8,13
1,01 …1,05 - - - 0,01 0,01 0,01 0,03
1,06 …1,26 - 0,01 0,02 0,03 0,04 0,06 0,11
1,27 …1,57 0,01 0,02 0,03 0,04 0,05 0,08 0,16
Προσα
ύξησ
η
Üz [
kW]
για
i
> 1,57 0,01 0,02 0,03 0,05 0,07 0,1 0,2
Πίν. 2-13β Ονοµαστική ισχύς PN [kW] ανά πτερύγιο για ιµάντες PL

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
53
Αριθµός στροφών µικρής τροχαλίας n1 [min-1]
100 300 500 700 950 1450 2850
20 0,01 0,02 0,03 0,04 0,05 0,06 0,11
25 0,01 0,03 0,04 0,05 0,07 0,09 0,16
31,5 0,01 0,03 0,05 0,07 0,09 0,13 0,23
35,5 0,02 0,04 0,06 0,08 0,11 0,15 0,28
40 0,02 0,05 0,07 0,1 0,13 0,18 0,32
45 0,02 0,05 0,08 0,11 0,14 0,21 0,38
50 0,02 0,06 0,09 0,13 0,16 0,24 0,43
63 0,03 0,08 0,12 0,16 0,21 0,31 0,56
71 0,03 0,09 0,14 0,18 0,24 0,35 0,64
80 0,04 0,1 0,16 0,21 0,28 0,4 0,72
90 0,04 0,11 0,18 0,24 0,31 0,45 0,82
100 0,05 0,12 0,2 0,26 0,35 0,51 0,91
112 0,05 0,14 0,22 0,3 0,39 0,57 1,02
125 0,06 0,16 0,25 0,33 0,44 0,63 1,14
140 0,06 0,17 0,27 0,37 0,49 0,71 1,27
∆ιά
µετρος
αναφο
ράς της
µικρής
τροχαλίας
d b1 [
mm
]
160 0,07 0,2 0,31 0,42 0,56 0,81 1,43
1,01 …1,05 - - - - - - -
1,06 …1,26 - - - - - 0,01 0,01
1,27 …1,57 - - - - 0,01 0,01 0,02
Προσα
ύξησ
η
Üz [
kW]
για
i
> 1,57 - - - 0,01 0,01 0,01 0,02
Πίν. 2-13γ Ονοµαστική ισχύς PN [kW] ανά πτερύγιο για ιµάντες PJ

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
54
2.7 Υπολογισµός οδοντωτών ιµάντων
Σχ. 2-23 Αλγόριθµος υπολογισµού οδοντωτών ιµάντων
Ο υπολογισµός των οδοντωτών
ιµάντων δεν είναι
προτυποποιηµένος. Έτσι και εδώ
συνίσταται να χρησιµοποιούνται οι
µεθοδολογίες υπολογισµού των
κατακετυαστών. Ο αλγόριθµος, ο
οποίος αναπτύσσεται παρακάτω
και περιγράφεται στο σχ. 2-23,
ισχύει κατά βάση µόνο για την
ανοικτή διάταξη (σχ. 2-24) και για
τους ιµάντες Mulco-Synchroflex-
Zahnriemen. ∆εν θα πρέπει να
χρησιµοποιείται χωρίς
διαφοροποιήσεις για ιµάντες
άλλων κατασκευαστών.
Ειδικός τύπος ιµάντα
Με την βοήθεια τη ισχύος
υπολογισµού P΄=cB . P και του
αριθµού στροφών της µικρής
τροχαλίας n1 επιλέγεται ο
κατάλληλος ιµάντας από τον σχ. 2-
25. Σε οριακές περιπτώσεις
συνίσταται ο υπολογισµός να
γίνεται και µε τους δύο ιµάντες και
η απόφαση να λαµβάνεται στο
τέλος.
Εδώ θα πρέπει να σηµειωθεί, ότι σε ιµάντες µε µεγαλύτερο βήµα αυξάνει η µέγιστη δυνατή
περιφερειακή δύναµη αλλά ταυτόχρονα αυξάνει η αναγκαία διάµετρος της τροχαλίας καθώς και ο
θόρυβος λειτουργίας.
ΕΝΑΡΞΗ
ΕΠΙΛΟΓΗ ΕΙ∆ΙΚΟΥ ΤΥΠΟΥ
ΑΡΙΘΜΟΣ Ο∆ΟΝΤΩΝ ΤΡΟΧΑΛΙΩΝ
ΕΠΙΛΟΓΗ ΑΡΧΙΚΗΣ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ
ΑΡΙΘΜΟΥΣ Ο∆ΟΝΤΩΝ ΤΟΥ ΙΜΑΝΤΑ
ΥΠΟΛΟΓΙΣΜΟΣ ΤΕΛΙΚΗΣ ΑΠΟΣΤΑΣΗΣ ΑΤΡΑΚΤΩΝ
ΠΡΟΣ∆ΙΟΡΙΣΜΟΣ ΠΛΑΤΟΥΣ ΙΜΑΝΤΑ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΥΠΟΛΟΓΙΣΜΟΣ v, Ft, fB, FW
ΝΑΙ
ΟΧΙ
ΙΚΑΝΟΠΟΙΗΤΙΚΑ ΑΚΟΤΕΛΕΣΜΑΤΑ ;
ΤΕΛΟΣΝΑΙ
ΟΧΙ

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
55
p
dd
l
a
dd
d
w1
a1f1
T
n ,z2 2,z11n
w2
a2d
f2
Σχ. 2-24 Ανοικτή διάταξη µετάδοσης κίνησης µε οδοντωτό ιµάντα
5.0
n [min ]
100005000
T 2,5
ΙΣΧΥΣ
ΥΠΟΛΟΓΙΣΜ
ΟΥ
0.1
0.20.3
0.5
1.0
2.03.0
Αριθµός στροφών µικρής τροχαλίας -1
40 10002000400200100302010
T 10
T 5
'P
[kW
]
200.0
100.0
50.0
30.020.0
10.0 T 20
Σχ. 2.25 Επιλογή ειδικού τύπου οδοντωντών ιµάντων
Αριθµός οδόντων
Ο αριθµός οδόντων δεν επιτρέπεται να
είναι µικρότερος από τις παρατιθέµενες
στον πίν. 2-15 τιµές. Για n1 > 3000 rpm
θα πρέπει να λαµβάνεται zmin 30%
µεγαλύτερο από αυτό, που αναφέρει ο
πίνακας. Με την σχέση µετάδοσης i =
n1 / n2 = z2 / z1 προκύπτει z2 = z1 / i (σε
αύξηση των στροφών είναι i < 1 και
πρέπει z2 > zmin).
Κατά τον προσδιορισµό του αριθµού
οδόντων των τροχαλιών θα πρέπει να
προτιµώνται τα µεγέθη, που διατηρεί σε
απόθεµα ο κατασκευαστής.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
56
Τύπος ιµάντα
Pmax[kW]
nmax[rpm]
vmax[m/s] Τυπικές εφαρµογές
T 2,5 0,5 40000 80Μεταδόσεις κίνησης σε µικροµηχανισµούς µε µεγάλες απαιτήσεις ακρίβειας
T 5 5 40000 80 Μηχανές γραφείου, κουζίνας, ρυθµιστικοί µηχανισµοί
T 10 30 15000 60Εργαλειοµηχανές, Υφαντουργικές και τυπογραφικές µηχανές
T 20 100 6000 40 ∆οµικά µηχανήµατα, αντλίες, συµπιεστέςΠίν. 2-14 Περιοχές εφαρµογών οδοντωτών ιµάντων
Τύπος ιµάντα
Βήµα (∆ιαίρεση)
Ύψος οδόντων Μήκος Lw
Αριθµός τροχαλίαςzmin
οδόντων
zmax
Ελάχιστος αριθµός οδόντων σε περίπτωση αντίθετης κάµψης
[mm] [mm] [mm]T 2,5 2,5 0,7 190…950 10 114 18T 5 5 1,2 100 …1380 10 114 15T 10 10 2,5 260… 4780 12 114 20T 20 20 5 1260 … 3620 15 114 25 Πίν. 2-15 Χαρακτηιστικά τροχαλιών οδοντωτών ιµάντων
∆ιάµετρος τροχαλιών
Με το βήµα p σε mm της οδόντωσης και από την σχέση dw . π = p . z προκύπτει η ενεργή διάµετρος
των τροχαλιών 1 και 2 :
2,12,1 zpdw ⋅=π
(2.50α)
καθώς και η διάµετρος κεφαλής των τροχαλιών 1 και 2 :
d pz
ca1 21 2
,,= ⋅ −
π (2.50β)
c [ - ] : σταθερά, η οποία εξαρτάται από τον ειδικό τύπο ιµάντα
Εδικός τύπος ιµάντα 2,5 5 10 20
c 0,201 0,162 0,186 0,142
Μήκος ιµάντα, απόσταση ατράκτων, διάστηµα προέντασης
Στην περίπτωση που η απόσταση ατράκτων δεν είναι δεδοµένη, µπορεί να επιλεγεί στο διάστηµα
( ) ( )210,25,0 ww dda +⋅÷≈ (2.51)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
57
Με την επιλεγµένη απόσταση ατράκτων υπολογίζεται προσεγγιστικά το µήκος του ιµάντα µε την
εξίσωση (2.29). Αντικαθιστώντας στην εξίσωση (2.29) την (2.50α) προκύπτει :
( )2
122
21 222
⋅−
⋅++⋅+′⋅≈πzz
apzzpeLwr (2.52)
Με την βοήθεια της γωνίας τύλιξης β1 στην µικρή τροχαλία (σχ. 2-20)
( )
⋅⋅−
⋅=π
βa
zzp2
arccos2 121 (2.53)
προσδιορίζεται το ακριβές υπολογιστικό µήκος του ιµάντα :
( ) ( )
−⋅
°−++⋅+
⋅⋅= 12
121
1180
122
sin2 zzzzpaLwrββ
(2.54)
Ο υπολογιστικός αριθµός οδόντων του ιµάντα προκύπτει από
z LpRrwr= (2.55)
Με το ακέραιο µέρος της παραπάνω πράξης, που είναι ο πραγµατικός αριθµός οδόντων zR,
υπολογίζεται το ενεργό µήκος του ιµάντα
L z pw R= ⋅ (2.56)
(Στον προσδιορισµό του ενεργού µήκους του ιµάντα, θα πρέπει πάλι να δίνεται προβάδισµα στα µήκη,
που διατηρεί σε απόθεµα ο κατασκευαστής)
Για το τελικά επιλεχθέν ενεργό µήκος του ιµάντα υπολογίζεται η αντίστοιχη απόσταση ατράκτων µε
την εξίσωση :
( ) ( ) ( )2
12
2
2121 224
124
1
−⋅⋅−
+⋅−⋅+
+⋅−⋅≈ zzpzzpLzzpLa ww π
(2.57)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
58
Για να είναι δυνατή η τοποθέτηση του ιµάντα θα πρέπει η απόσταση των ατράκτων να µπορεί να
µειωθεί κατά το διάστηµα, που δίνει η εξίσωση (2.58). Η απαραίτητη (µικρή όµως) προένταση του
ιµάντα επιτυγχάνεται µε αύξηση της απόστασης των ατράκτων κατά το διάστηµα
s LSp w≥ ⋅0 01, (2.58)
Πλάτος ιµάντα
Στους οδοντωτούς ιµάντες επιτυγχάνεται η µετάδοση της ισχύος µε σύνδεση µορφής. Στην περίπτωση
αυτή η επιφανειακή πίεση, η οποία εξαρτάται από τον αριθµό στροφών καθορίζει τις δυνάµεις, οι
οποίες κατά µέγιστο µπορούν να µεταφερθούν.
Αν ο αριθµός των οδόντων του ιµάντα, που κάθε χρονική στιγµή βρίσκονται σε επαφή µε αντίστοιχα
της τροχαλίας είναι
z ze =
⋅°
1 1360β
(2.59)
τότε το απαιτούµενο πλάτος του ιµάντα είναι :
b c PP z
B
spez e≥
⋅⋅
(2.60)
Pspez [kW/mm] : Ονοµαστική ισχύς του ιµάντα, πίν. 2-17
Τελικά το πλάτος του ιµάντα επιλέγεται µε την βοήθεια του πίν. 2-16. Για την αντιµετώπιση του
προβλήµατος µε την βοήθεια υπολογιστή µπορεί για τον προσδιορισµό του πλάτους να
χρησιµοποιηθεί ο τύπος
b c Pp p h z n
B
Fl z≈
⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅
21 6 109
12
1 1
,β
(2.61)
p n n nFl = − ⋅
+ ⋅
− ⋅
1 55 2 8810000
3 0210000
1 0510000
1 12
13
, , , ,
hz [mm] : Ύψος οδόντων, πίν.2-15
b, p [mm] - P [kW] - n1 [rpm] - pFl [N/mm2]
β1 [ ° ]

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
59
Στο τελικό στάδιο θα πρέπει να αποδειχθεί, ότι η περιφερειακή ταχύτητα υ και η περιφερειακή δύναµη
δεν υπερβαίνουν τις τιµές στους πίν. 2-14 και 2-16. Ακόµη θα πρέπει να ελεγθεί η συχνότητα
καµπτικής ταλάντωσης, η οποία υπολογίζεται µε την σχέση (2.26), να είναι fB < 100 1/s.
Η φόρτιση της ατράκτου υπολογίζεται προσεγγιστικά ( )F Fwo t≈ ÷ ⋅1 5 2 0, , ,max .
Τύπος Eπιτρεπόµενη περιφερειακή δύναµη [N] ως προς το πλάτος του ιµάντα b σε mmιµάντα 4 6 10 16 25 32 50 75 100T 2,5 39 65 117 195T 5 165 315 540 877 1140 1810T 10 709 1250 2070 2710 4340 6610 8890T 20 2160 3660 4830 7830 12000 16160
Πίν. 2-16 Πλάτη ιµάντων και επιτρεπόµενη περιφερειακή δύναµη

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
60
Τύπος Ονοµαστική ισχύς ανά ενεργό δόντι σε W/mm, για n1 rpmιµάντα z1 100 300 600 1000 1500 2000 3000 4000 5000 6000 7000 8000 10000 12000 15000
10 0,035 0,11 0,21 0,29 0,44 0,59 0,72 0,89 1,05 1,19 1,24 1,26 1,34 1,39 1,4812 0,044 0,14 0,23 0,35 0,53 0,7 0,88 1,07 1,25 1,37 1,45 1,48 1,6 1,71 1,8
T 2,5 15 0,055 0,16 0,29 0,45 0,68 0,89 1,14 1,36 1,55 1,66 1,78 1,83 2,11 2,19 2,820 0,074 0,22 0,41 0,62 0,95 1,25 1,55 1,9 2,18 2,39 2,58 2,67 2,96 3,08 3,2330 0,11 0,32 0,6 0,9 1,4 1,86 2,33 2,8 3,11 3,4 3,62 3,73 4,14 4,35 4,4640 0,14 0,43 0,8 1,25 1,88 2,5 3 3,75 4,28 5 5,37 5,53 5,86 5,98 6,2510 0,1 0,4 0,8 1,2 1,8 2,2 3,1 3,9 4,4 5,1 5,7 6,3 7,4 8,3 9,415 0,2 0,6 1,2 1,9 2,7 3,4 4,8 5,9 6,8 7,8 8,7 9,6 11,3 12,8 14,5
T 5 20 0,3 0,9 1,6 2,6 3,7 4,6 6,4 7,9 9,2 10,5 11,8 13 15,3 17,2 19,530 0,5 1,3 2,5 3,9 5,5 7 9,7 12 13,9 15,9 17,8 19,6 23,1 26 29,540 0,6 1,7 3,3 5,2 7,4 9,4 13 16,1 18,6 21,3 23,8 26,3 30,9 34,8 39,550 0,8 2,2 4,2 6,5 9,3 11,7 16,3 20,2 23,3 26,8 29,9 33 38,8 43,6 49,412 0,7 2 3,7 5,7 8 9,9 13,3 16 18,6 21 22,5 24,2 27 30,2 32,915 0,9 2,6 4,7 7,2 10,1 12,5 16,8 20,2 23,5 26,5 28,4 30,6 34,1 38,1 41,520 1,2 3,4 6,4 9,7 13,5 16,8 22,6 27,3 31,7 35,7 38,3 41,2 46 51,3 55,9
T 10 30 1,9 5,2 9,7 14,6 20,5 25,5 34,2 41,3 48 54 58 62,4 69,6 77,840 2,5 7 12,9 19,6 27,5 34,1 45,8 55,3 64,3 72,4 77,7 83,650 3,1 8,8 16,2 24,6 34,5 42,8 57,5 69,4 80,7 90,8 97,415 3,6 9,6 17,1 23,8 32,8 40,4 52,7 60,8 68,9 74,120 4,9 12,9 23 31,9 44,1 54,3 70,9 81,7 92,6
T 20 30 7,3 19,5 34,7 48,2 66,1 82 107,1 123,540 9,8 26,1 46,5 64,6 89,1 109,8 143,350 12,3 32,8 58,2 80,9 111,6 137,560 14,8 39,4 70 97,2 134,1 165,2
Πίν.2-17 Ειδική ισχύς Pspez οδοντωτών ιµάντων

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
61
2.8 ∆ιαµόρφωση των ιµανοκινήσεων
2.8.1 Γενικά
Η κατασκευαστική διαµόρφωση των στοιχείων, που λαµβάνουν µέρος στις ιµανοκινήσεις είναι για
την βέλτιστη λειτουργία του συστήµατος το ίδιο σηµαντική όπως και η επιλογή ιµάντα.
Προϋποθέσεις για ήσυχη λειτουργία της ιµαντοκίνησης είναι :
το µέσο του ιµάντα θα πρέπει να συµπίπτει µε το µέσο της τροχαλίας (ιδιαίτερα σε
διασταυρούµενες και ηµιδιασταυρούµενες διατάξεις
ακριβής ζυγοστάθµιση ατράκτων και τροχαλιών
ακρίβεια στην περιστροφική κίνηση των τροχαλιών
2.8.2 Κυριώτερες διαστάσεις τροχαλιών
Οι κυριώτερες διαστάσεις των τροχαλιών, όπως διάµετρος, πλάτος και αυλακώσεις στεφάνης και
µερικές φορές διαστάσεις της πλύµνης ειναι καθορισµένες από σχετικά πρότυπα. Αντίθετα
λεπτοµέρειες, όπως πλήθος και διαστάσεις βραχιόνων κ.ά. αφήνονται στον κατασκευαστή.
Τροχαλίες επίπεδων ιµάντων
Οι κυριώτερες διαστάσεις των τροχαλιών αυτών είναι τυποποιηµένες κατά DIN 111. Οι αριθµητικές
τιµές της εξωτερικής διαµέτρου d, του πλάτους της στεφάνης B, του ύψους κύρτωσης h και το µέγιστο
επιτρεπόµενο πλάτος του ιµάντα b δίνονται στον πίν. 2-7.
Τροχαλίες κανονικών τραπεζοειδών ιµάντων
Οι κυριώτερες διαστάσεις αυτών είναι τυποποιηµένες κατά DIN 2217 Τ1. Αριθµητικές τιµές της
ενεργής διαµέτρου dw και του τραπεζοειδούς προφίλ δίνονται στον πίν. 2-8.
Τροχαλίες στενών τραπεζοειδών ιµάντων
Οι κυριώτερες διαστάσεις αυτών είναι τυποποιηµένες κατά DIN 2211 Τ1. Αριθµητικές τιµές της
κανονικής διαµέτρου dr και του τραπεζοειδούς προφίλ δίνονται στον πίν. 2-9.
Τροχαλίες τραπεζοειδών ιµάντων µε πτερύγια

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
62
Οι κυριώτερες διαστάσεις είναι τυποποιηµένες κατά DIN 7867, πίν. 2-10.
Τροχαλίες οδοντωτών ιµάντων
Οι κυριώτερες διαστάσεις είναι τυποποιηµένες κατά DIN 7721 T2.
2.8.3 Υλικά και κατασκευαστική διαµόρφωση των τροχαλιών
Γιια την κατασκευή τροχαλιών χρησιµοποιείται συνήθως χυτοσίδηρος (GG-15, GG-20). Για υψηλά
φορτιζόµενες τροχαλίες χρησιµοποιείται χυτοχάλυβας (GS-38, GS-45) ή και χάλυβας. Ελάχιστα
φορτιζόµενες τροχαλίες µπορούν να κατασκευαστούν και από ελαφρά µέταλλα, ξύλο ή πολυµερή
υλικά.
Μικρές τροχαλίες κατασκευάζονται ενιαία (µε χύτευση ή από συµπαγές υλικό και µετά τόρνευση) και
έως την διάµετρο 355 mm η στεφάνη συνδέεται µε την πλύµνη µέσω ενός δίσκου (σχ. 2.27). Σε
µεγαλύτερες τροχαλίες πλύµνη και στεφάνη συνδέονται µε την βοήθεια βραχιόνων. Το αναγκαίο
πλήθος των βραχιόνων υπολογίζεται µε βάση την εµπειρική σχέση ( )z d mm≈ ⋅ ≥0 15 4, . Οι
βραχίονες έχουν συνήθως ελλειπτική διατοµή (λόγος ακτίνων ≈ 1: 2), η οποία από την στεφάνη προς
την πλύµνη αυξάνει µε την σχέση ≈ 4: 5 . Για τις διαστάσεις της πλύµνης ισχύει, ότι ισχύει γενικά για
την σύνδεση ατράκτων πλυµνών.
Το ελάχιστο πάχος της στεφάνης πρέπει να είναι s ≈ d/300+2 mm ≥ 3 mm. Η επιφάνεια της
τροχαλίας, στην οποία λειτουργεί ο ιµάντας θα πρέπει να είναι κατά το δυνατό λεία. Η ίδια επιφάνεια
θα πρέπει να κατασκευάζεται µε κύρτωση (σχ. 2-27), έτσι ώστε να οδηγείται ο ιµάντας και να
παραµένει κατά την λειτουργία στο µέσον της τροχαλίας. Ενώ για την µικρότερη καταπόνηση του
ιµάντα θα πρέπει η κύρτωση να κατασκευάζεται στην µεγάλη τροχαλία, συνήθως κατασκευάζεται για
οικονοµικούς λόγους στην µικρή τροχαλία. Για ταχύτητες ιµάντα υ ≥ 20 m/s καθώς και σε διατάξεις
µε κατακόρυφες ατράκτους (οριζόντιες τροχαλίες) θα πρέπει και οι δύο τροχαλίες να
κατασκευάζονται µε κύρτωση.
Μεγάλες τροχαλίες κατασκευάζονται διαιρούµενες (σχ. 2-28b), έτσι ώστε να διευκολύνεται η
τοποθέτηση τους.
Όταν το πλήθος των προς παραγωγή τροχαλιών είναι µικρό, αυτές κατασκευάζονται συγκολλητές (σχ.
2-29). Για την κατασκευή χρησιµοποιούνται χαλύβδινα δοµικά στοιχεία µε απλές διατοµές π.χ. λάµες,
γωνιές κ.λ.π.

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
63
Τέλος στο σχ. 2-30 δίνονται µερικές κατασκευαστικές δυνατότητες για τροχαλίες τραπεζοειδών
ιµάντων και στο σχ.2-31 για τροχαλίες οδοντωτών ιµάντων.
ΗΜΕΡΗΣΙΑ
∆ΙΑΡΚΕ
ΙΑ
ΛΕΙΤΟ
ΥΡΓΙΑΣ
ΣΤΟΙΧΕΙΟ
ΜΕΤΑ
∆ΟΣΗ
Σ ΚΙΝΗΣΗ
Σ
ΕΝΤΑ
ΣΗ ΦΟΡΤΙΟΥ
ΚΑΙ Κ
ΡΟΥΣΤ
ΙΚΩΝ
∆ΡΑΣΕ
ΩΝ
ΡΥΘ
ΜΟΣ
ΕΚΚΙΝΗΣΕ
ΩΝ
ΕΙ∆ΟΣ ΚΙΝΗΤΗ
ΡΙΑΣ
ΜΗΧΑΝΗΣ
Ατµοµηχανή4-κύλινδρη ΜΕΚ
2-κύλινδρη ΜΕΚ
Υδροστρόβιλος
ΑτµοστρόβιλοςΗλεκτροκινητήρας
1-κύλινδρη ΜΕΚ
Βαριές
και
συχνές
Μέτριος
ρυθ
µός
Ελαφρ
ές ή
σπάνιες
1,5
1,0
3,0
2,5
2,0
Πλήρες φο
ρτίο
- Ισχυρά
κρουστικά φο
ρτία
Πλήρες φο
ρτίο
- Χω
ρίς
κρουστικά φο
ρτία
Πλήρες φο
ρτίο
- Μέτρια
κρουστικά φο
ρτία
Ατέρµων κοχλίας
(υπερθέρµανση
)
Οδον.
τροχοί (επιφ
. φθορά
)
Ιµάντες,
αλυσίδες,
τροχοί τριβής
Οδον.
τροχοί (θραύση
) &
συµπ
λέκτες
Σπάνια
πλήρες φο
ρτίο
3,5
24 h
8 h
3 h
1 h
cB
Σχ. 2-32 ∆ιάγραµµα Richter- Ohlendorf επιλογής συντελεστή συνθηκών λειτουργίας cB
1,0 1,12 1,25 1,4 1,6 1,8 2,0 2,24 2,5 2,8
3,15 3,55 4,0 4,5 5,0 5,6 6,3 7,1 8,0 9,0
Πίν. 2-18 Τυποποιηµένοι αριθοί σύµφωνα µε την σειρά R20

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
64
3000 O1500 3000 1500 1000 750 3000 1500 3000 1500
71 71 90 112 45 M6 0,37 0,25 - - 0,00034 0,00054 2 1,971 71 90 112 45 M6 0,55 0,37 0,18 - 0,00039 0,00068 2,4 2,2580 80 100 125 50 M8 0,75 0,55 0,37 - 0,00089 0,00134 2,2 280 80 100 125 50 M8 1,1 0,75 0,55 - 0,0012 0,00182 2,4 2,3
90S 90 100 140 56 M8 1,5 1,1 0,75 - 0,0021 0,00316 2,6 2,290L 90 125 140 56 M8 2,2 1,5 1,1 - 0,0025 0,00383 3 2,6100L 100 140 160 63 M10 3 2,2 3) 1,5 0,75 3) 0,00325 0,00488 2,8 2,4112M 112 140 190 70 M10 4 4 2,2 1,5 0,0055 0,0094 3,3 2,5132S 132 140 216 89 M10 5,5 3) 5,5 3 2,2 0,008 0,018 3,4 3,4132M 132 178 216 89 M10 - 7,5 4 3) 3 - 0,0318 - 3,1160M 160 210 254 108 M12 11 11 7,5 4 3) 0,023 0,045 4 3,6160L 160 254 254 108 M12 18,5 15 11 7,5 0,0615 0,101 2,9 2,7180M 180 241 279 121 M12 22 18,5 - - 0,0753 0,118 3 2,9180L 180 279 279 121 M12 - 22 15 11 - 0,141 - 3200L 200 305 318 133 M16 30 3) 30 18,5 3) 15 0,142 0,222 2,6 2,7225S 225 286 356 149 M16 55x110 60x140 - 37 - 18,5 - 0,356 - 2,8225M 225 311 356 149 M16 55x110 60x140 45 45 30 22 0,27 0,461 3 2,8250M 250 349 406 168 M20 60x140 65x140 55 55 37 30 0,424 0,677 2,7 2,7280S 280 368 457 190 M20 65x140 75x140 75 75 45 37 0,816 1,06 3,2 2,7280M 280 419 457 190 M20 65x140 75x140 90 90 55 45 0,957 1,26 3,2 2,7315S 315 406 508 216 M24 65x140 80x170 110 110 75 5 1,19 2 3,2 2,8315M 315 457 508 216 M24 65x140 80x170 132 132 90 75 1,45 2,35 3,2 2,8
Άκρο ατράκτου d x l 1)
σε ns [min-1]
ΜΕΓ
ΕΘΟΣ
ΚΙΝΗΤΗ
ΡΑ
h [mm]
a [mm]
b [mm]
55x110
Ισχύς P [kW] σε σύγχρονο αριθµό στροφών ns [min-1] 2)
Μαζική ροπή αδράνειας ρότορα
J [Kgm2] 4)
σε ns [min-1]
Ροπή ανατροπής προς ονοµαστική ροπή TKi/TN σε ns
[min-1] 4) 5)
42x11042x11048x11048x110
28x6028x6038x8038x80
19x4019x4024x5024x50
14x3014x30
w1
[mm]s
1) Ανοχές : όταν dO 48 : k6, dP55 : m6 2) ns σε ασύγχρονους κινητήρες περίπου 0,5 … 10 % (µεγάλοι … µικροί κινητήρες) µικρότερος 3) ή επόµενη µεγαλύτερη ισχύς 4) κατά AEG 5) απ’ ευθείας σύνδεση
Πίν. 2-19 Χαρακτηριστικά κινητήρων εναλασσοµένου ρεύµατος κατά DIN 42673 T1 (Τύπος IM B3 µε έδρανα κύλισης)

ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ - ΙΜΑΝΤΟΚΙΝΗΣΕΙΣ
65
x=0F0 [kN]
x=lFl [kN]
Ειδικόςτύπος
dr [mm] ΑυλάκιαPeriflex
Μέγεθος 7)
Hadeflex XW
Μέγεθος 7)
71 0,45 0,53 - - - 1 2471 0,45 0,53 - - - 1 2480 0,52 0,63 SPZ 63 1 1 2480 0,52 0,63 SPZ 63 1 1 24
90S 0,78 0,92 SPZ 71 1 2 2490L 0,78 0,92 SPZ 71 2 2 24100L 1,06 1,31 SPZ 90 2 2 28112M 1,04 1,27 SPZ 112 2 2 28132S 1,53 1,94 SPZ 125 2 6 38132M 1,53 1,94 SPZ 140 3 6 38160M 1,59 2,04 SPZ 140 4 16 42160L 1,59 2,04 SPZ 140 5 16 48180M 1,95 2,35 SPZ 160 5 16 48180L 1,95 2,35 SPA 180 4 16 55200L 2,75 3,35 SPA 180 5 40 55225S 2,95 3,75 SPA 200 5 40 60225M 2,95 3,75 SPB 224 4 40 65250M 3,6 4,4 SPB 224 4 40 75280S 7,2 8,7 - - - 63 75280M 7,2 8,7 - - - 63 85315S 8,1 9,9 - - - 125 85315M 8,1 9,9 - - - 125 100
Επιτρεπόµενη φόρτιση ατράκτου 6) για ns = 1500 min-1 όταν η δύναµη εφαρµόζεται
Τροχαλία στενών τραπεζοειδών ιµάντων DIN 2211
7) για ns=1500 min-1
Συµπλέκτης για ns=1500 min-1
π.χ.
ΜΕΓ
ΕΘΟΣ
ΚΙΝΗΤΗ
ΡΑ
l0
0
l
F
FF
x
dr
sb
1
h
d
wa
6) κατά SIEMENS. Όταν η δύναµη εφαρµόζεται σε ενδιάµεση θέση τότε η επιτρεπόµενη τιµή της δύναµης είναι Fy F0 + (Fl-F0).x/l
7) για κανονικές συνθήκες λειτουργίας
Πίν. 2-19 Χαρακτηριστικά κινητήρων εναλασσοµένου ρεύµατος κατά DIN 42673 T1 (Τύπος IM B3 µε έδρανα κύλισης)(συν.)