11 Free vibrations: one degree of freedomkiranku/Dynamics2017/Files/11/Dynamics...11 Free...
22
11 Free vibrations: one degree of freedom R r O A B ✓ φ A g 11.1 A uniform rigid disk of radius r and mass m rolls without slipping inside a circular track of radius R, as shown in the figure. The centroidal moment of inertia I C of the disk is given by I = 1 2 mr 2 . 1. What is the correct equation of motion for an arbitrary large angle θ? (a) 3 2 (R - r) ¨ θ + g sin θ =0 (b) 3 2 (R + r) ¨ θ + g cos θ =0 (c) 2 3 (R - r) ¨ θ - g sin θ =0 (d) 1 2 (R-r) R ¨ θ + g sin θ =0 (e) 5 2 (R - r) ¨ θ - 2g sin θ =0 2. What is the natural frequency ω n of small oscillations around the equilibrium posi- tion θ = 0? (a) ω n = q g R-r (b) ω n = q 2g 3(R-r) (c) ω n = q 2g 3 (d) ω n = g 3(R-r) (e) ω n = √ 3 3. Given θ(0) = π 10 and ˙ θ(0) = 1, what is the value of θ at t = 3? (hint: use the linearized equation of motion) (a) θ(3) = q 3(R-r) 2g sin q 6g (R-r) + π 10 cos q 6g (R-r) (b) θ(3) = π 10 cos q 6g (R-r) (c) θ(3) = q 3(R-r) 2g sin q 6g (R-r) (d) θ(3) = q (R-r) g sin q 2g (R-r) + π 10 cos q 3g (R-r) (e) θ(3) = q 3(R-r) 2 2g 2 sin q 6g (R-r) + π 10 cos q 6g (R-r) 11-1
Transcript of 11 Free vibrations: one degree of freedomkiranku/Dynamics2017/Files/11/Dynamics...11 Free...

11 Free vibrations: one degree of freedom
Rr
O
A
B
✓
�A
g
11.1 A uniform rigid disk of radius r and massm rolls without slipping inside a circular track ofradius R, as shown in the figure. The centroidalmoment of inertia IC of the disk is given by I =12mr2.
1. What is the correct equation of motion for anarbitrary large angle θ?
(a) 32(R− r)θ + g sin θ = 0
(b) 32(R + r)θ + g cos θ = 0
(c) 23(R− r)θ − g sin θ = 0
(d) 12
(R−r)R
θ + g sin θ = 0
(e) 52(R− r)θ − 2g sin θ = 0
2. What is the natural frequency ωn of small oscillations around the equilibrium posi-tion θ = 0?
(a) ωn =√
gR−r
(b) ωn =√
2g3(R−r)
(c) ωn =√
2g3
(d) ωn = g3(R−r)
(e) ωn =√
3
3. Given θ(0) = π10
and θ(0) = 1, what is the value of θ at t = 3? (hint: use thelinearized equation of motion)
(a) θ(3) =√
3(R−r)2g
sin√
6g(R−r) + π
10cos√
6g(R−r)
(b) θ(3) = π10
cos√
6g(R−r)
(c) θ(3) =√
3(R−r)2g
sin√
6g(R−r)
(d) θ(3) =√
(R−r)g
sin√
2g(R−r) + π
10cos√
3g(R−r)
(e) θ(3) =√
3(R−r)22g2
sin√
6g(R−r) + π
10cos√
6g(R−r)
11-1

11 Free vibrations: one degree of freedom 11-2
Solution question 1
Consider a normal and tangential (n-t) coordinate system as shown. On this diagram,the applied forces are shown as well. In order to derive the equation of motion, we couldapply angular momentum principle about the center of mass C as
HC + vC × P = M extC ,
HC + 0 = M extC .
(11.1)
Since the problem is planar, the angular momentum principle has only one component,which can be written as
ICα = Ffr . (11.2)
where α is the angular acceleration of the body relative to the inertial frame. The angularacceleration of the body written in terms of the θ and φ is
α = φ− θ . (11.3)
Since the disk rolls without slipping, it holds that
rφ = Rθ . (11.4)
By combining (11.3) and (11.4) and substituting into (11.2) we obtain
mr2
2(R
rθ − θ) = Ffr ⇒ Ff =
1
2m(R− r)θ . (11.5)
We can now write the linear momentum principle in the tangential direction as
Pt = Ft ⇒ mvC = Ft (11.6)
where Ft denotes the resultant force in the tangential direction. The velocity vC is simplygiven by
vC = (R− r)θ, (11.7)
and therefore
m(R− r)θ = −Ff −mg sin θ. (11.8)

11 Free vibrations: one degree of freedom 11-3
Then, by substituting (11.5) into (11.8) we obtain the desired equation of motion
3
2m(R− r)θ +mg sin θ = 0 (11.9)
which can be rewritten in the form
θ +2g
3(R− r) sin θ = 0 . (11.10)
Alternative solution: note that the problem could be easily solved also by taking theangular momentum principle w.r.t the contact point. In this way, the effect of the forcesat the contact point is neglected.
By inspecting all the possible answers for question 1, we can easily see that thatoption (d) has inconsistent units. Option (c) and (e) feature negative stiffness coefficients,which contradicts the physics of the problem. Option (b) has a cosine term related to thestiffness term, giving a restoring force for θ = 0, which is not possible.
Solution question 2
If we Taylor expand the equation of motion up to linear order in terms of θ and θ aroundthe equilibrium point (θ, θ) = (0, 0), we obtain the linearized equation of motion
f(θ, θ) = θ +2g
3(R− r) sin θ = f(0, 0) + ∂θf(0, 0)θ + ∂θf(0, 0)θ +O(|θ|3) (11.11)
= θ +2g
3(R− r)θ +O(|θ|3) = 0. (11.12)
Therefore, the equation of motion governing small oscillations is given by
θ + ω2nθ = 0 . (11.13)
where the natural frequency ωn is given by
ωn =
√2g
3(R− r) . (11.14)
Solution question 3
We could immediately exclude options (c), (d) and (e), which have incorrect units. Onehas to solve the problem to select among (a) and (b). Looking at the linearized equationof motion, we know that the solution is of the form:
θ(t) = a sin(ωnt) + b cos(ωnt) , (11.15)
θ(t) = aωn cos(ωnt)− bωn sin(ωnt) . (11.16)
By inserting the initial conditions θ(0) and θ(0), we obtain:
a =1
ωnand b =
π
10. (11.17)
11 Free vibrations: one degree of freedom 11-4
The motion is therefore given by:
θ(t) =1
ωnsin(ωnt) +
π
10cos(ωnt) . (11.18)
And therefore, at t = 3,
θ(3) =
√3(R− r)
2gsin
√6g
(R− r) +π
10cos
√6g
(R− r) . (11.19)
11 Free vibrations: one degree of freedom 11-5
k1 k2
m
g
Parallel
k1
k2
m
g
Series
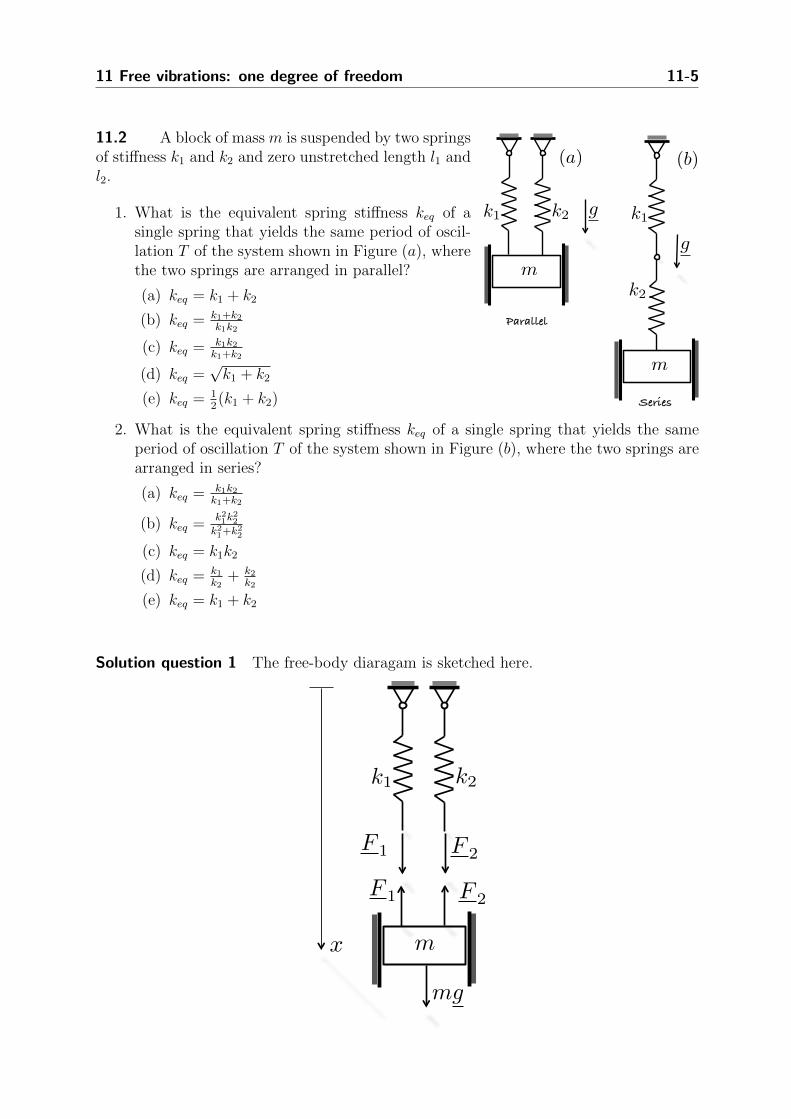
(a) (b)11.2 A block of mass m is suspended by two springsof stiffness k1 and k2 and zero unstretched length l1 andl2.
1. What is the equivalent spring stiffness keq of asingle spring that yields the same period of oscil-lation T of the system shown in Figure (a), wherethe two springs are arranged in parallel?
(a) keq = k1 + k2
(b) keq = k1+k2k1k2
(c) keq = k1k2k1+k2
(d) keq =√k1 + k2
(e) keq = 12(k1 + k2)
2. What is the equivalent spring stiffness keq of a single spring that yields the sameperiod of oscillation T of the system shown in Figure (b), where the two springs arearranged in series?
(a) keq = k1k2k1+k2
(b) keq =k21k
22
k21+k22
(c) keq = k1k2
(d) keq = k1k2
+ k2k2
(e) keq = k1 + k2
Solution question 1 The free-body diaragam is sketched here.
k1 k2
m
mg
F 1 F 2
F 1 F 2
x

11 Free vibrations: one degree of freedom 11-6
The forces of the two springs are given by
F1 = k1x (11.20)
F2 = k2x (11.21)
(11.22)
The linear momentum principle for the mass m is simply given
mx=mg − F1 − F2 (11.23)
=mg − (k1 + k2)x. (11.24)
Introducing the equivalent stiffness
keq = k1 + k2 , (11.25)
we have
mx+ keqx = mg. (11.26)
Introducing
y := x− mg
keq(⇒ y = x), (11.27)
we can shift the origin to the equilibrium position1. We are now back to the familiarequation of motion for undamped, unforced vibrations.
y +keqmy = 0. (11.28)
With ω20 := keq
m, the period of oscillation T becomes
T =2π
ω0
= 2π
√m
k1 + k2
. (11.29)
1You can picture this by thinking of an equivalent spring that has stiffness keq. Once we attach themass m to its end, due to the gravitational force mg, the spring will extend to the new length mg
keq. This
is the term that we subtracted in (11.27).
11 Free vibrations: one degree of freedom 11-7
Analysis of the multiple choice answers Clearly, options (b), (c) and (d) do not havethe correct units.
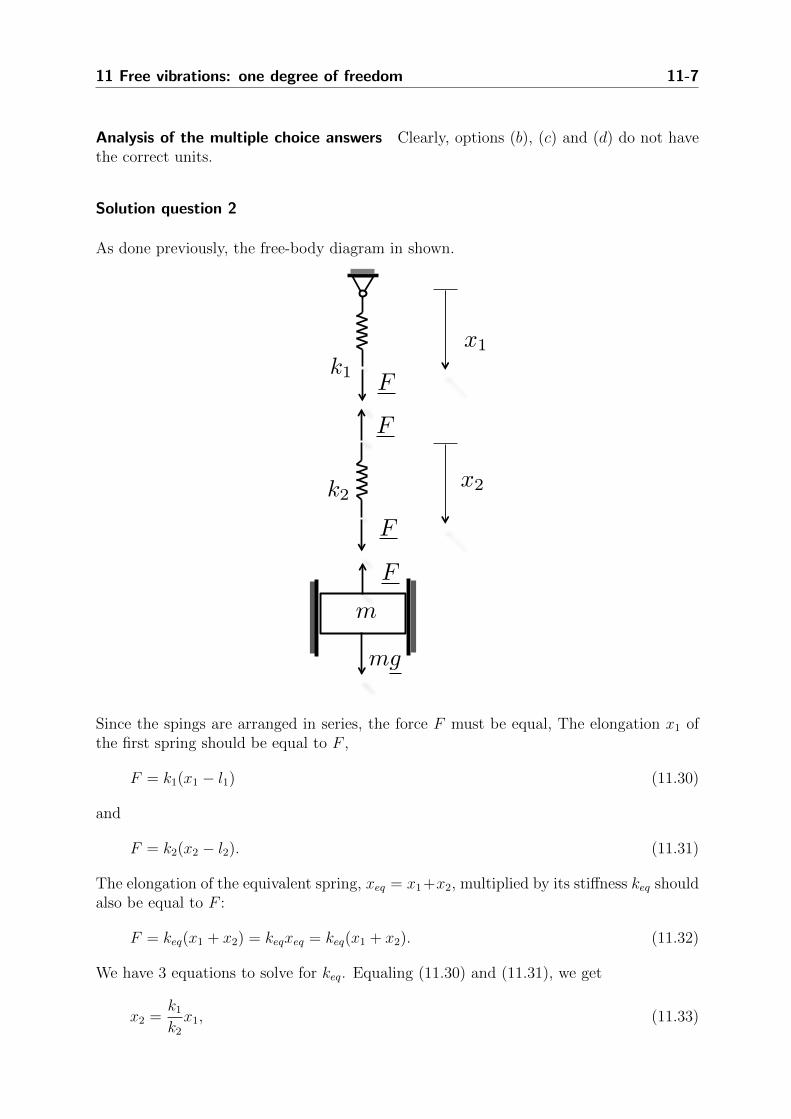
Solution question 2
As done previously, the free-body diagram in shown.
k1
k2
m
mg
x1
x2
F
F
F
F
Since the spings are arranged in series, the force F must be equal, The elongation x1 ofthe first spring should be equal to F ,
F = k1(x1 − l1) (11.30)
and
F = k2(x2 − l2). (11.31)
The elongation of the equivalent spring, xeq = x1+x2, multiplied by its stiffness keq shouldalso be equal to F :
F = keq(x1 + x2) = keqxeq = keq(x1 + x2). (11.32)
We have 3 equations to solve for keq. Equaling (11.30) and (11.31), we get
x2 =k1
k2
x1, (11.33)
11 Free vibrations: one degree of freedom 11-8
and plugging into (11.32),
F = keq(x1 +k1
k2
x1). (11.34)
Comparing this to (11.30), we need
keq(x1 +k1
k2
x1) = k1x1. (11.35)
The result for keq is
keq =k1
1 + k1k2
=k1k2
k1 + k2
. (11.36)
The period of oscillation T is therefore going to be
T = 2π
√m(k1 + k2)
k1k2
. (11.37)

11 Free vibrations: one degree of freedom 11-9
11.3 Consider the following pendulum consisting of a homogeneous thin rod withcenter of mass C, and of a point mass m rigidly attached at the tip B of the rod. The rodhas mass M and length l. It is suspended at point O, and may rotate without frictionabout it. We denote the angular displacement with respect to the vertical axis by ϕ. Amassless spring of stiffness k connects points B and A, as shown. The x and y componentsof the distance between point A and O are given by a and b = l/
√2, respectively. Let
the restoring force of the spring be zero when |rBA| = 0. Gravity is acting downwards, asshown. the centroidal moment of inertia of the rod is given by IC = 1
12Ml2.
gO
Bk
M, l
m
'ex
ey
AC
a
b
ez
1. What is the correct equation of motion of the system?
(a) ϕ = 23kaml
cosϕ+ 38
(√2 km
+ 3gl
)cos2 ϕ
(b) ϕ = 23kaml
cosϕ− 14
(√2 km
+ 3gl
)sinϕ
(c) ϕ = 34
kmal
cosϕ− 38
(√2 km
+ 3gl
)sinϕ
(d) ϕ = 34kaml
sinϕ+ 38
(√2 km
+ 3gl
)sinϕ
(e) ϕ = 34kaml
cosϕ− 38
(√2 km
+ 3gl
)sinϕ
2. What is the value of a that results in an equilibrium at ϕ0 = π4? Assume M = m.
(a) a = l√2
+ 52mgkl
(b) a = l√2
+ 32mgk
(c) a = − l√2− 3
2mgk
(d) a = 0
(e) a = l√2
3. Introduce the new variable x(t) = ϕ(t)−ϕ0. What is the correct linearized equationof motion?
(a) x+ 34
(km
+ 3√2
gl
)x = 0
(b) x− 23
(km
+ 3√2
gl
)x = 0
(c) x+ 34
(k + 3√
2g)x = 0
(d) x+ 34
(km
2+ 3√
2
gl2)x = 0
(e) x− 34
(km
+ 32gl
)x = 0

11 Free vibrations: one degree of freedom 11-10
Solution question 1
We will need the following vectors:
rOC =l
2cosϕex +
l
2sinϕey ≡ rCB, (11.38)
rOB = l cosϕex + l sinϕey, (11.39)
rOA = bex + aey, (11.40)
rBA = rOA − rOB. (11.41)
We could separate the rod from the point mass and highlight the reaction forces R =Rxex +Ryey and T = Txex + Tyey:
O
B
' Cex
ey
ez
T
�T
Mg mg
krBA
R
We can now write the linear momentum principle for mass m as
mrOB = −T +mg + krBA. (11.42)
Differentiating (11.39) twice, using the other expressions from Step I to write out krBA,and then solving for T , we get
Tx = kb+mg − kl cosϕ+ml cos(ϕ)ϕ2 +ml sin(ϕ)ϕ, (11.43)
Ty = ka− kl sinϕ+ml sin(ϕ)ϕ2 −ml cos(ϕ)ϕ. (11.44)
The linear momentum principle for the rod writes
MrOC = R +Mg + T , (11.45)
which yields the following components of the reeaction force R
Rx =−1
2
[2Mg + 2Tx +Ml cos(ϕ)ϕ2 +Ml sin(ϕ)ϕ
], (11.46)
Ry =1
2
[−2Ty −Ml sin(ϕ)ϕ2 +Ml cos(ϕ)ϕ
]. (11.47)
The angular momentum principle for the rod, with respect to its center of mass C, gives
HC = M extC . (11.48)
By introducing the centroidal moment of inertia IC , the angular momentum HC can bewritten as
HC =1
12Ml2 ϕ ez. (11.49)

11 Free vibrations: one degree of freedom 11-11
The external torque M extC is given by
M extC = rCO ×R + rCB × T (11.50)
=l
2[(−Ry + Ty) cosϕ+ (Rx − Tx) sinϕ] ez. (11.51)
By using all the derived relations, the ez-component of the angular momentum principle(11.48) is obtained as
1
12Ml2ϕ = −1
4l (−4ka cosϕ+ 2(2kb+ 2mg +Mg) sinϕ+ l(4m+M)ϕ) . (11.52)
Solving the last equation for ϕ yields
ϕ =3
2· 2ka cosϕ− (2kb+ (2m+M)g) sinϕ
(3m+M)l. (11.53)
Using b = l/√
2 and M = m, this simplifies to
ϕ =3
4
ka
mlcosϕ− 3
8
(√2k
m+ 3
g
l
)sinϕ. (11.54)
Alternative solution: The problem can be easily solved also by considering the mass andthe bar as a unique body, and then by taking the angular momentum principle w.r.t. thehinge O. In this case, only the gravity force and the spring force generate a torque. notethat, in this case, one has to compute the moment of inertia of the assembly w.r.t. O.This is obtained as IO = 1
12Ml2 + 1
4Ml2 +ml2 = (1
3M +m)l2.
Analysis of the multiple choice answers Option (c) has inconsistent units. All theother options are in principle plausible, as it is a priori not possible to infer about thesigns of the various terms by inspection. One has to solve the problem fully to providethe correct answer.
Solution question 2
At equilibrium, we have ϕ = 0 and ϕ = 0. All that needs to be done is to insert thedesired equilibrium value ϕ = ϕ0 into Eq. (11.54) and set the left hand side to zero:
0 =3
4
ka
mlcosϕ0 −
1
8
(3√
2k
m+ 9
g
l
)sinϕ0. (11.55)
With ϕ0 = π4, and thus sin π
4= cos π
4= 1√
2, we get
a =l√2
+3
2
mg
k. (11.56)
With this choice of parameter, the ODE (11.54) becomes
ϕ+3
8
[√2k
m+ 3
g
l
](sinϕ− cosϕ) = 0. (11.57)

11 Free vibrations: one degree of freedom 11-12
Analysis of the multiple choice answers Option (a) has inconsistent units. Also, byinspecting the system, it is clear that a = 0 (option (d)) is not the correct answer.
Now we linearize about ϕ0 = π4
by introducing the new variable x = ϕ − ϕ0. Theexpressions we need to plug into (11.57) are therefore
ϕ = ϕ0 + x =π
4+ x ⇒ ϕ = x ⇒ ϕ = x. (11.58)
We also need the following Taylor expansions about the equilibrium point:
sin(π
4+ x)
=1√2
+1√2x+O(x2), (11.59)
cos(π
4+ x)
=1√2− 1√
2x+O(x2). (11.60)
With these equations, Eq. (11.57) can be expanded as
x+3
8
[√2k
m+ 3
g
l
](1√2
+1√2x− 1√
2+
1√2x+O(x2)
)= 0. (11.61)
The linear ODE is therefore
x+3
4
(k
m+
3√2
g
l
)x = 0, (11.62)
which governs free undamped vibrations of natural frequency
ω0 =
√3
4
(k
m+
3√2
g
l
). (11.63)
Analysis of the multiple choice answers Option (c) and (d) feature inconsistent units.
11 Free vibrations: one degree of freedom 11-13
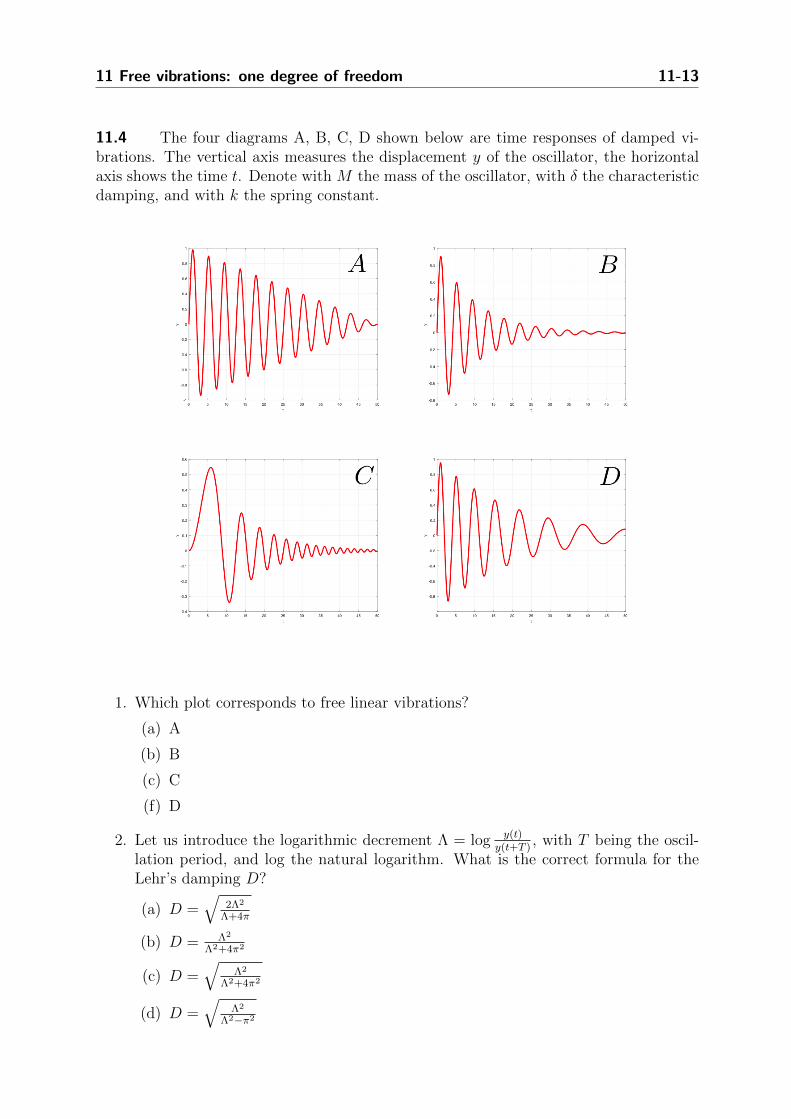
11.4 The four diagrams A, B, C, D shown below are time responses of damped vi-brations. The vertical axis measures the displacement y of the oscillator, the horizontalaxis shows the time t. Denote with M the mass of the oscillator, with δ the characteristicdamping, and with k the spring constant.
1. Which plot corresponds to free linear vibrations?
(a) A
(b) B
(c) C
(f) D
2. Let us introduce the logarithmic decrement Λ = log y(t)y(t+T )
, with T being the oscil-lation period, and log the natural logarithm. What is the correct formula for theLehr’s damping D?
(a) D =√
2Λ2
Λ+4π
(b) D = Λ2
Λ2+4π2
(c) D =√
Λ2
Λ2+4π2
(d) D =√
Λ2
Λ2−π2

11 Free vibrations: one degree of freedom 11-14
(e) D =√
ΛΛ+4π2
3. Consider the response below. What is an approximate value of the Lehr’s dampingD?
(a) D ≈ 0.03
(b) D ≈ 0.3
(c) D ≈ −0.9
(d) D ≈ 10
(e) D ≈ −0.0003
Solution question 1
We see oscillations with decaying amplitudes. We are therefore looking for free, under-damped vibrations. in this case, the general solution can then be written as
y(t) = e−δt (C1 cosωδt+ C2 sinωδt) , (11.64)
where
ωδ =√ω2
0 − δ2, (11.65)
with ω0 =√k/M being the natural frequency of the undamped system. As discussed in
the lecture, eq. (11.64) may also be written as
y(t) = C0 e−δt sin(ωδt+ ϕ0), (11.66)
where ϕ0 is a constant. Clearly, we must have an oscillation with constant period Tδ = 2πωδ
and exponentially decaying amplitude C0 e−δt. By inspecting the given answer options,we observe that
• Curve A decays linearly, and not as C0 e−δt.
• Curve C and D shows oscillations with variable period.
• Curve B is the only choice consistent with (11.66).
11 Free vibrations: one degree of freedom 11-15
Solution question 2
We list the following definitions and identities:
δ=ω0D, (11.67)
Tδ =2π
ωδ, (11.68)
ωδ =√ω2
0 − δ2 = |ω0|√
1−(δ
ω0
)2
= ω0
√1−D2. (11.69)
The expression for the logarithmic decrement Λ is given by:
Λ = logy(t)
y(t+ Tδ)(11.70)
= loge−δt sin(ωδt+ ϕ0)
e−δ(t+Tδ) sin(ωδ(t+ Tδ) + ϕ0)(11.71)
= log eδTδ (11.72)
= δTδ (11.73)
(11.67)−(11.69)=
2πD√1−D2
(11.74)
By solving the last equation for (positive) D, we get
D =
√Λ2
Λ2 + 4π2. (11.75)
(c)
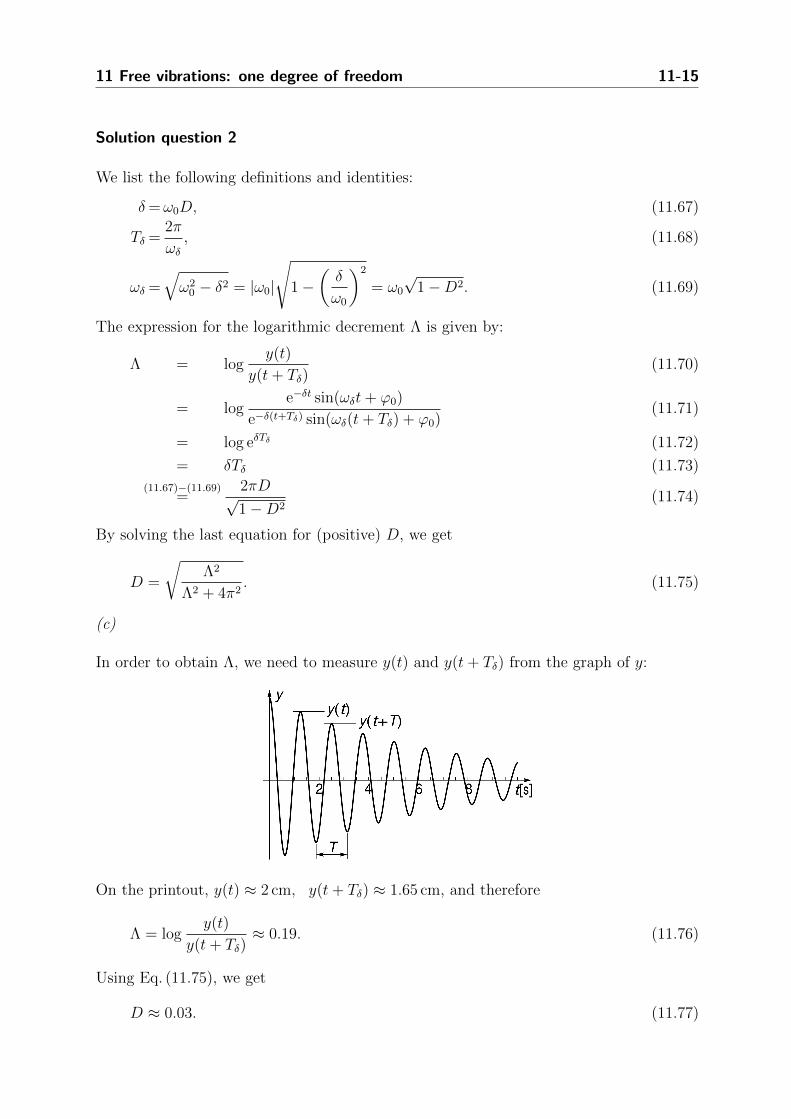
In order to obtain Λ, we need to measure y(t) and y(t+ Tδ) from the graph of y:
On the printout, y(t) ≈ 2 cm, y(t+ Tδ) ≈ 1.65 cm, and therefore
Λ = logy(t)
y(t+ Tδ)≈ 0.19. (11.76)
Using Eq. (11.75), we get
D ≈ 0.03. (11.77)

11 Free vibrations: one degree of freedom 11-16
Analysis of the multiple choice questions Options (c) and (e) are negative: this isin contrast with the decaying behavior depicted. Options (a), (b) and (d) are orders ofmagnitudes apart to cancel the effect of small measuring errors.

11 Free vibrations: one degree of freedom 11-17
R1
R2
m1
m2
m0kb
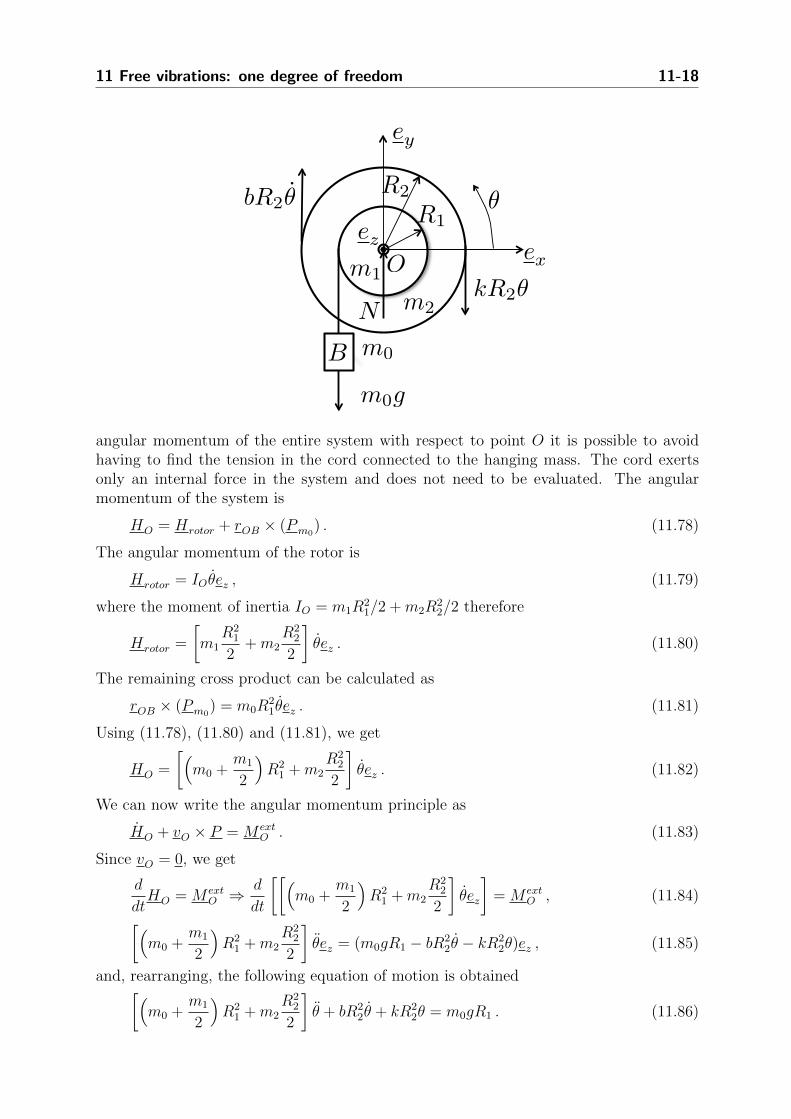
✓11.5 Two uniform cylinders of mass m1 and m2
and radius R1 and R2 are welded together. Thiscomposite object rotates without friction about afixed point O. Two inextensible massless strings arewrapped without slipping around the larger cylin-der. The two ends of the strings are connected tothe ground through a spring of constant k and adamper of damping coefficient b. The smaller cylinderis connected to a block of mass m0 via an inextensiblemassless string wrapped without slipping around thesmaller cylinder. The block is constrained to movevertically; assume the strings are also able to sustaincompressive forces. (Hint: the centroidal moment ofinertia of a disk of mass m and radius r is given byI = 1
2mr2.)
1. What is the equation of motion of the system in terms of the rotation angle θ?
(a)[(m0 + m1
2
)R2
1 +m2R2
2
2
]θ + bR2
2θ + kR22θ = m0gR1
(b)[m0R
21 +m2
R22
2
]θ + bR2
2θ + kR22θ = m0gR1
(c)[(m0 + m1
2
)R2
1 +m2R2
2
]θ + bR2θ + kR2
2θ = m0gR1
(d)[(m0 + m1
2
)R2
1 −m2R2
2
2
]θ − bR2
2θ + kR22θ = m0gR1
(e) m2R2
2
2θ + bR2
2θ + kR22θ = m0gR1
2. Which are the correct values of the natural frequency and characteristic dampingof the system?
(a) ω02 =
kR22(
m0 + m1
2
)R2
1 +m2R2
2
2
, δ =bR2
2
2[(m0 + m1
2
)R2
1 +m2R2
2
2
](b) ω0
2 =
√kR2(
m0 + m1
2
)R2
1 +m2R2
2
2
, δ =
√bR2
2[(m0 + m1
2
)R2
1 +m2R2
2
2
](c) ω0
2 =kR2
2
(m0 +m1 +m2)R21
, δ =bR2
2
(m0 +m1 +m2)R21
(d) ω02 =
k
(m0 +m1 +m2), δ =
b
(m0 +m1 +m2)
(e) ω02 =
kR22(
m0 + m1
2
)R2
1 +m2R2
2
2
, δ = 0
Solution question 1
The reference system and the free-body diagram are shown below. By evaluating the
11 Free vibrations: one degree of freedom 11-18
R1
R2
m1
m2
m0
bR2✓
kR2✓
m0g
N
✓
Oex
ey
ez
B
angular momentum of the entire system with respect to point O it is possible to avoidhaving to find the tension in the cord connected to the hanging mass. The cord exertsonly an internal force in the system and does not need to be evaluated. The angularmomentum of the system is
HO = Hrotor + rOB × (Pm0) . (11.78)
The angular momentum of the rotor is
Hrotor = IOθez , (11.79)
where the moment of inertia IO = m1R21/2 +m2R
22/2 therefore
Hrotor =
[m1
R21
2+m2
R22
2
]θez . (11.80)
The remaining cross product can be calculated as
rOB × (Pm0) = m0R
21θez . (11.81)
Using (11.78), (11.80) and (11.81), we get
HO =
[(m0 +
m1
2
)R2
1 +m2R2
2
2
]θez . (11.82)
We can now write the angular momentum principle as
HO + vO × P = M extO . (11.83)
Since vO = 0, we get
d
dtHO = M ext
O ⇒d
dt
[[(m0 +
m1
2
)R2
1 +m2R2
2
2
]θez
]= M ext
O , (11.84)[(m0 +
m1
2
)R2
1 +m2R2
2
2
]θez = (m0gR1 − bR2
2θ − kR22θ)ez , (11.85)
and, rearranging, the following equation of motion is obtained[(m0 +
m1
2
)R2
1 +m2R2
2
2
]θ + bR2
2θ + kR22θ = m0gR1 . (11.86)

11 Free vibrations: one degree of freedom 11-19
Solution question 2
By definition, the natural frequency of the system is given by
ω02 =
kR22(
m0 + m1
2
)R2
1 +m2R2
2
2
(11.87)
while the characteristic damping is
δ =bR2
2
2((m0 + m1
2
)R2
1 +m2R2
2
2). (11.88)
11 Free vibrations: one degree of freedom 11-20
L
L
L
r
z
✓
g
A
B
C
2⇡/3
2⇡/3
2⇡/3
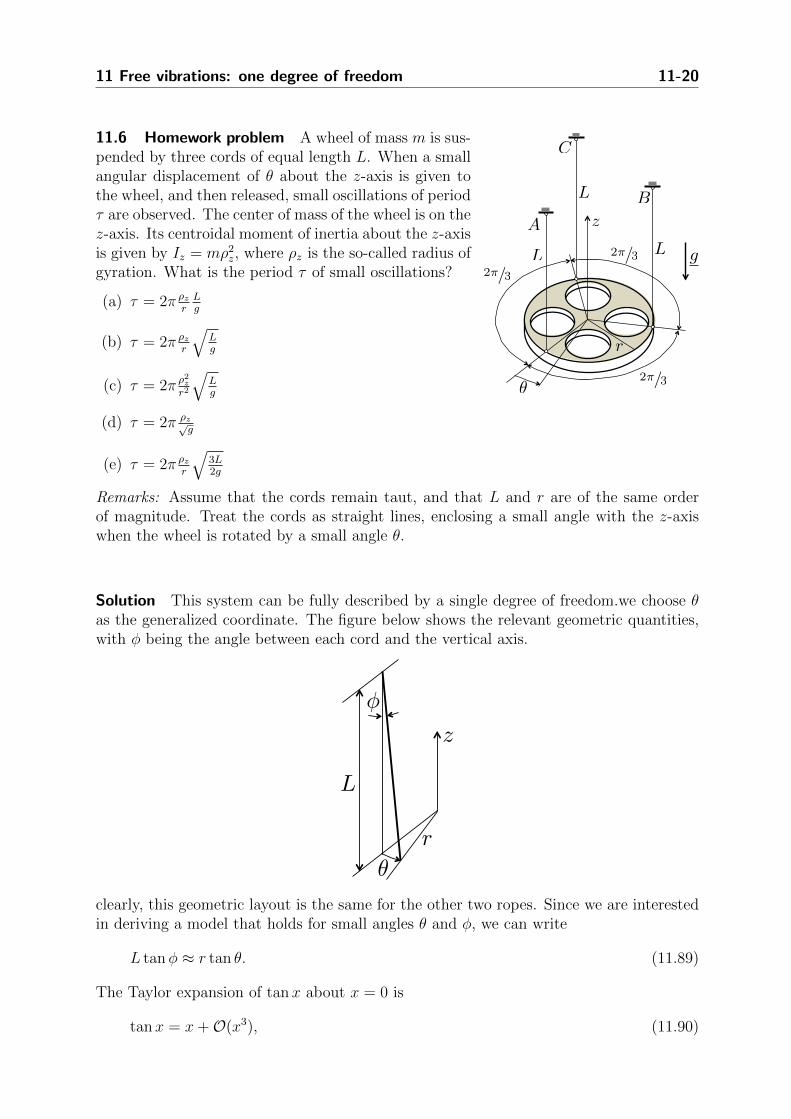
11.6 Homework problem A wheel of mass m is sus-pended by three cords of equal length L. When a smallangular displacement of θ about the z-axis is given tothe wheel, and then released, small oscillations of periodτ are observed. The center of mass of the wheel is on thez-axis. Its centroidal moment of inertia about the z-axisis given by Iz = mρ2
z, where ρz is the so-called radius ofgyration. What is the period τ of small oscillations?
(a) τ = 2π ρzrLg
(b) τ = 2π ρzr
√Lg
(c) τ = 2π ρ2z
r2
√Lg
(d) τ = 2π ρz√g
(e) τ = 2π ρzr
√3L2g
Remarks: Assume that the cords remain taut, and that L and r are of the same orderof magnitude. Treat the cords as straight lines, enclosing a small angle with the z-axiswhen the wheel is rotated by a small angle θ.
Solution This system can be fully described by a single degree of freedom.we choose θas the generalized coordinate. The figure below shows the relevant geometric quantities,with φ being the angle between each cord and the vertical axis.
✓
�
L
r
z
clearly, this geometric layout is the same for the other two ropes. Since we are interestedin deriving a model that holds for small angles θ and φ, we can write
L tanφ ≈ r tan θ. (11.89)
The Taylor expansion of tan x about x = 0 is
tanx = x+O(x3), (11.90)
11 Free vibrations: one degree of freedom 11-21
which is a good approximation (only) for |x| � 1. We use this to approximate Eq. (11.89)as
φ =r
Lθ. (11.91)
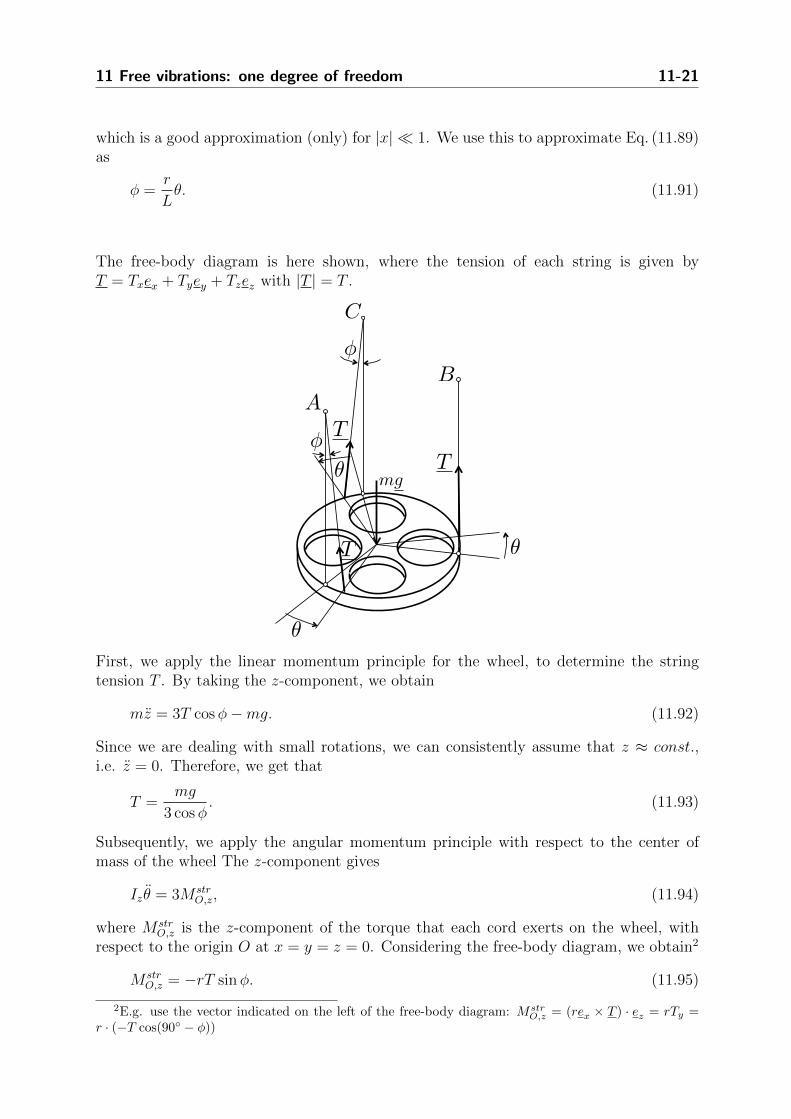
The free-body diagram is here shown, where the tension of each string is given byT = Txex + Tyey + Tzez with |T | = T .
✓
✓
✓ mg
T
T
T
�
�
A
B
C
First, we apply the linear momentum principle for the wheel, to determine the stringtension T . By taking the z-component, we obtain
mz = 3T cosφ−mg. (11.92)
Since we are dealing with small rotations, we can consistently assume that z ≈ const.,i.e. z = 0. Therefore, we get that
T =mg
3 cosφ. (11.93)
Subsequently, we apply the angular momentum principle with respect to the center ofmass of the wheel The z-component gives
Iz θ = 3M strO,z, (11.94)
where M strO,z is the z-component of the torque that each cord exerts on the wheel, with
respect to the origin O at x = y = z = 0. Considering the free-body diagram, we obtain2
M strO,z = −rT sinφ. (11.95)
2E.g. use the vector indicated on the left of the free-body diagram: MstrO,z = (rex × T ) · ez = rTy =
r · (−T cos(90◦ − φ))

11 Free vibrations: one degree of freedom 11-22
Together with Iz = mρ2z, the angular momentum principle yields
mρ2z θ = −3rT sinφ. (11.96)
We eliminate T using (11.93):
mρ2z θ = −rmg sinφ
cosφ. (11.97)
Now we replace φ by θ using (11.91), to obtain a non-linear equation of motion for θ:
θ +gr
ρ2z
tan( rLθ)
= 0. (11.98)
Within the small-angle approximation, we may use tanx = x + O(x3) again and obtainthe linear ODE
θ +gr2
ρ2zLθ = 0. (11.99)
This describes free vibrations with natural circular frequency
ω0 =r
ρz
√g
L, (11.100)
and period of oscillation
τ =2π
ω0
= 2π
(ρzr
√L
g
). (11.101)
Analysis of multiple choices Option (a) is not unit-consistent. Option (d) does notshow any dependency on the length of the strings L, which is in contradiction with thephysics of the problem.