
1 Operatori negli spazi di Hilbert - moby.mib.infn.itmoby.mib.infn.it/~zaffaron/operatori.pdf · 1...
26
1 Operatori negli spazi di Hilbert 1.1 Operatori lineari in spazi normati Definizione 1 Una mappa lineare (operatore) tra spazi normati f : X → Y ` e una mappa che preserva la struttura lineare f (αx + βy)= αf (x)+ βf (y), x, y ∈ X, α, β ∈ C (1) Un operatore che abbia come immagine C (X → C) viene anche chiamato funzionale lineare. Definizione 2 Una mappa lineare tra spazi normati f : X → Y si dice limitata se esiste una costante K tale per cui kf (x)k≤ K kxk ∀x ∈ X. (2) Una mappa limitata manda insiemi limitati in insiemi limitati. Infatti, un insieme ` e limitato se ` e contenuto in una sfera di raggio r (kxk≤ r); l’immagine della sfera di raggio r ` e per`o contenuta nella sfera di raggio Kr a causa della definizione 2 (kf (x)k≤ Kr). Negli spazi normati il concetto di limitatezza ` e equivalente a quello di continuit` a. Vale infatti il seguente teorema, Teorema 1 Sia f : X → Y una mappa lineare tra spazi normati. Le seguenti affermazioni sono tra loro equivalenti: a) f ` e limitata b) f ` e continua c) f ` e continua in un punto Dim: a) → b): da kf (y) - f (x)k = kf (y - x)k≤ K kx - yk, segue che x → y implica f (x) → f (y). b) → c): ovvio. c) → a): f sia continua in x 0 . Per ogni esiste un δ tale per cui kf (x + x 0 ) - f (x 0 )k = kf (x)+ f (x 0 ) - f (x 0 )k = kf (x)k < (3) per ogni kxk <δ . Fissato e un generico y ∈ X , x = δy (2kyk) soddisfa kxk = δ 2 <δ . Quindi kf ( δy 2kyk )k < e, di conseguenza, kf (y)k < 2 δ kyk. f ` e quindi limitata. ✷ Definizione 3 Si definisce norma della mappa lineare f il pi` u piccolo dei numeri K per cui l’identit` a (2) ` e valida. La norma di f viene indicata con kf k. Vale quindi kf (x)k≤kf kkxk (4) 1
Transcript of 1 Operatori negli spazi di Hilbert - moby.mib.infn.itmoby.mib.infn.it/~zaffaron/operatori.pdf · 1...

1 Operatori negli spazi di Hilbert
1.1 Operatori lineari in spazi normati
Definizione 1 Una mappa lineare (operatore) tra spazi normati f : X → Y e una
mappa che preserva la struttura lineare
f(αx+ βy) = αf(x) + βf(y), x, y ∈ X, α, β ∈ C (1)
Un operatore che abbia come immagine C (X → C) viene anche chiamato funzionale
lineare.
Definizione 2 Una mappa lineare tra spazi normati f : X → Y si dice limitata se
esiste una costante K tale per cui
‖f(x)‖ ≤ K‖x‖ ∀x ∈ X. (2)
Una mappa limitata manda insiemi limitati in insiemi limitati. Infatti, un insieme e
limitato se e contenuto in una sfera di raggio r (‖x‖ ≤ r); l’immagine della sfera di raggio
r e pero contenuta nella sfera di raggio Kr a causa della definizione 2 (‖f(x)‖ ≤ Kr).
Negli spazi normati il concetto di limitatezza e equivalente a quello di continuita.
Vale infatti il seguente teorema,
Teorema 1 Sia f : X → Y una mappa lineare tra spazi normati. Le seguenti affermazioni
sono tra loro equivalenti:
a) f e limitata
b) f e continua
c) f e continua in un punto
Dim: a) → b): da ‖f(y) − f(x)‖ = ‖f(y − x)‖ ≤ K‖x − y‖, segue che x → y implica
f(x) → f(y). b) → c): ovvio. c) → a): f sia continua in x0. Per ogni ε esiste un δ tale
per cui
‖f(x+ x0)− f(x0)‖ = ‖f(x) + f(x0)− f(x0)‖ = ‖f(x)‖ < ε (3)
per ogni ‖x‖ < δ. Fissato ε e un generico y ∈ X, x = δy(2‖y‖) soddisfa ‖x‖ = δ
2< δ. Quindi
‖f( δy2‖y‖)‖ < ε e, di conseguenza, ‖f(y)‖ < 2ε
δ‖y‖. f e quindi limitata. 2
Definizione 3 Si definisce norma della mappa lineare f il piu piccolo dei numeri K per
cui l’identita (2) e valida. La norma di f viene indicata con ‖f‖. Vale quindi
‖f(x)‖ ≤ ‖f‖‖x‖ (4)
1

per ogni x ∈ X. Poiche f e lineare, questa identita si puo riscrivere come ‖f( x‖x‖)‖ ≤ ‖f‖.
La formula (4) e quindi equivalente a
‖f(x)‖ ≤ ‖f‖, ‖x‖ = 1 (5)
e ‖f‖ puo anche essere definito come
‖f‖ = sup‖x‖=1‖f(x)‖. (6)
L’insieme degli operatori continui tra due spazi normati X e Y
B(X, Y ) = f : X → Y |f lineare limitato (7)
munito della mappa f → ‖f‖ e uno spazio vettoriale normato.
Teorema 2 B(X, Y ) e uno spazio vettoriale normato. E completo se Y e completo.
Dim: E immediato verificare che ‖f‖ definisce una norma. Sia An una successione di
Cauchy in B(X, Y ). Vale quindi ‖An − Am‖ < ε per n,m > n0. Da
‖An(x)− Am(x)‖ = ‖(An − Am)(x)‖ ≤ ‖An − Am‖‖x‖ < ε‖x‖ (8)
concludiamo che ‖An(x)‖ e una successione di Cauchy in Y per ogni x fissato. Poiche Y
e completo, An(x) convergera a un vettore in Y che chiamiamo A(x). A e ovviamente
un operatore lineare ed e anche continuo; infatti passando al limite nell’equazione (8)
otteniamo ‖A(x)−An(x)‖ ≤ ε‖x‖ e ‖A(x)‖ = ‖(A(x)−An(x))+An(x)‖ ≤ (ε+‖An‖)‖x‖.Quindi A ∈ B(X, Y ). Infine dalle stesse equazioni segue che ‖An − A‖ ≤ ε e che la
successione An converge ad A nella norma di B(X, Y ). 2
Ricordiamo che uno spazio vettoriale normato completo si chiama spazio di Banach.
Se Y e uno spazio di Banach anche B(X, Y ) lo e. In particolare, B(H) ≡ B(H,H), cioe
lo spazio vettoriale degli operatori lineari continui in uno spazio di Hilbert, e uno spazio
di Banach.
1.2 Isomorfismo tra spazi di Hilbert
Definizione 3: Un isomorfismo tra spazi normati (o spazi di Hilbert) e una mappa
lineare biunivoca che preserva la norma: ‖f(x)‖ = ‖x‖.
Osservazioni: una mappa che preserva la norma si chiama anche isometria. In gen-
erale, un isomorfismo tra spazi e una mappa biunivoca che preserva le proprieta (alge-
briche, topologiche, etc...) che sono definite su questi spazi. Nel caso particolare in cui lo
spazio normato sia anche uno spazio di Hilbert sembrerebbe piu naturale definire un iso-
morfismo come una mappa lineare che preserva il prodotto scalare: (f(x), f(y)) = (x, y).
2

Le due definizioni sono in realta equivalenti: qualora in uno spazio siano definiti sia un
prodotto scalare che l’associata norma, una mappa lineare che preserva l’uno preserva
anche l’altra, e viceversa. Infatti, norma e prodotto scalare si possono ricostruire una
dall’altro attraverso le identita
‖x‖2 = (x, x)
4(x, y) = ‖x+ y‖2 − ‖x− y‖2 + i(‖x+ iy‖2 − ‖x− iy‖2) (9)
Esempio 1: Ogni spazio di Hilbert H separabile e isomorfo a l2. Ricordiamo che uno
spazio di Hilbert si dice separabile quando possiede un sistema ortonormale completo
(s.o.n.c.) numerabile. In uno spazio di Hilbert separabile, scelto un s.o.n.c. xi, ogni
x ∈ H si scrive in maniera unica come x =∑aixi. Questa identificazione induce una
mappa H → l2 : x → ai che e un isomorfismo di spazi di Hilbert. Innanzitutto, la
mappa e ben definita ed e un’isometria perche∑|ai|2 = ‖x‖2. La mappa e iniettiva
per l’unicita dei coefficienti di Fourier, ed e suriettiva perche, per ogni successione in l2
vale∑|ai|2 < ∞ e di conseguenza la formula x =
∑aixi definisce un elemento di H.
L’isomorfismo in questione non e naturale perche richiede la scelta di una base.
Esempio 2: La trasformata di Fourier puo essere pensata come una mappa lineare da
L2(R) in L2(R). Preserva la norma ‖f‖ = ‖f‖ (teorema di Parseval) ed e biunivoca. E
pertanto un isomorfismo.
1.3 Il teorema di Riesz
Il teorema di Riesz caratterizza i funzionali lineari continui in uno spazio di Hilbert.
Ricordiamo dall’algebra lineare che l’insieme dei funzionali lineari in uno spazio vettoriale
V e anch‘esso uno spazio vettoriale che prende il nome di spazio duale V ∗. Nel caso di
spazi normati e utile modificare la definizione richiedendo che V ∗ sia lo spazio vettoriale
dei funzionali lineari continui. Dal teorema 2, segue che V ∗ e uno spazio vettoriale
normato completo. Nel caso finito-dimensionale, V e V ∗ hanno la stessa dimensione e
sono quindi banalmente isomorfi. La struttura di spazio di Hilbert consente di definire
un isomorfismo naturale tra H e il suo duale H∗ per ogni spazio di Hilbert. Per ogni
x0 ∈ H possiamo definire un particolare funzionale lineare continuo H → C : x→ (x, x0).
Il teorema di Riesz garantisce che ogni funzionale continuo ha questa forma e stabilisce
un’isomorfismo tra H e H∗.
Teorema 3 (Riesz): Ogni funzionale lineare continuo L su uno spazio di Hilbert H si
puo scrivere in maniera univoca come L(x) = (x, x0). Vale inoltre ‖L‖ = ‖x0‖.
3

Dimostrazione: Nel caso particolare L = 0, x0 = 0 e il teorema e ovvio. Possiamo
quindi supporre L 6= 0. Definiamo M = x ∈ H|Lx = 0. Poiche L e lineare e continuo,
M e un sottospazio chiuso di H ed ammette quindi un complemento ortogonale M⊥.
Scegliamo un particolare z ∈ M⊥ con ‖z‖ = 1. Definito u = L(x)z − L(z)x, abbiamo
che L(u) = L(x)L(z) − L(z)L(x) = 0; quindi u ∈ M . Visto che u ∈ M e z ∈ M⊥,
0 = (u, z) = L(x)(z, z) − L(z)(x, z). Ne segue che L(x) = L(z)(x, z) = (x, L(z)z).
Quindi il teorema vale con x0 = L(z)z. Da |L(x)| = |(x, x0)| ≤ ‖x‖‖x0‖ segue che
‖L‖ ≤ ‖x0‖. Visto che |L(x0)| = ‖x0‖2, la disuguaglianza precedente e certamente
saturata e ‖L‖ = ‖x0‖. L’unicita segue dal fatto che, se L(z) = (x, x0) = (x, x′0), allora
(x, x0−x′0) = 0; x0−x′0 e quindi nullo perche ortogonale a qualunque vettore nello spazio
di Hilbert. 2
1.4 Esempi di operatori negli spazi di Hilbert
Consideremo operatori lineari A : H → H. Per semplicita le parentesi tonde in A(x)
saranno a volte omesse: Ax sta per A(x). Se non altrimenti specificato, useremo lettere
maiuscole dell’alfabeto latino per indicare operatori negli spazi di Hilbert, lettere minus-
cole (della parte finale) dell’alfabeto latino per indicare vettori in H e lettere greche per
indicare scalari.
Esempio 1: caso finito dimensionale. A : H → H, dimH = N . Scegliamo una
base ei, i = 1, ..., N . Consideriamo lo sviluppo di x e di Ax: x =∑N
i=1 xiei e Ax =∑Ni=1(Ax)iei. Si ha che
(Ax)i = (Ax, ei) = (A(N∑j=1
xjej), ei) =N∑j=1
xj(Aej, ei) (10)
Vediamo che A, in termini delle coordinate rispetto alla base scelta, e rappresentato da
una matrice
(Ax)i =N∑j=1
Aijxj, Aij = (Aej, ei) (11)
Gli operatori negli spazi infinito dimensionali generalizzano il concetto di matrice.
Come dimostrano i seguenti esempi, molte proprieta valide negli spazi di dimensione
finita sono false negli spazi di dimensione infinita.
Esempio 2: operatore di shift in H = l2. A(a1, a2, ....) = 0, a1, a2, .... definisce un
operatore lineare continuo con norma 1. E infatti un’isometria: ‖Ax‖ = ‖x‖. E iniettivo
ma non suriettivo: l’elemento z = 1, 0, 0, .... non e infatti nell’immagine di A. A mappa
4

H biunivocamente in un suo sottoinsieme proprio A(H) = (z)⊥. Questo e possibile
solo perche H e infinito-dimensionale. A si puo rappresentare come una matrice infinita
Aij, i, j = 1, 2.... le cui sole entrate non nulle sono Ai+1,i = 1, i = 1, 2....
Esempio 3: gli operatori posizione e momento della Meccanica Quantistica. Definiamo
in L2[a, b] −∞ ≤ a < b ≤ ∞ gli operatori
x : xf(x) = xf(x)
p : pf(x) = −i dfdx
(x) (12)
I due operatori soddisfano le regole di commutazione di Heisenberg [x, p] = i come segue
dal semplice calcolo
xpf(x)− pxf(x) = −ix ddxf(x) + i
d
dx(xf(x)) = if(x) (13)
Esistono operatori A e B che soddisfano l’algebra astratta di Heisenberg [A,B] = i
soltanto in spazi infinito dimensionali. Infatti, in uno spazio di dimensione finita N ,
A e B sarebbero rappresentabili da matrici N per N e l’equazione [A,B] = i sarebbe
inconsistente, come si vede prendendo la traccia:
0 = Tr[A,B] = Tr(AB)− Tr(BA) = Tr(AB)− Tr(AB) ≡ N (14)
dove si e usata la properieta di ciclicita della traccia.
Esempio 4: operatori differenziali in H = L2(X), X sottoinsieme di Rn. Per semplicita
consideriamo X = (a, b),−∞ ≤ a < b ≤ ∞ e il piu semplice degli operatori differen-
ziali: A = −i∂x. L’operatore A ha due seri problemi: 1) Non e continuo. Consideriamo
ad esempio yn(x) = e−nx in L2[0, π]. Ayn = inyn e di conseguenza ‖Ayn‖/‖yn‖ = n
non puo essere limitato. 2) Non e nemmeno definito ovunque. Infatti non tutte le fun-
zioni a quadrato sommabile sono derivabili con derivata ancora appartenente allo stesso
spazio. A e definito solo su un sottoinsieme D(A) di H che prende il nome di dominio
dell’operatore. D(A) contiene almeno tutte le funzioni C1[a, b] ed e un sottoinsieme denso
di L2[a, b]. I problemi 1)+2) sono comuni a tutti gli operatori differenziali.
Osservazione sul dominio: l’esempio 4 descrive una caratteristica generale della teoria
degli operatori negli spazi di Hilbert: gli operatori di maggior interesse non sono continui
e non sono nemmeno definiti sull’intero H. Gli operatori continui possono sempre estesi
all’intero H. Se un operatore continuo A e definito in un dominio D(A) puo sempre
essere esteso a D(A) per continuita. Vale infatti
5

Teorema 4: Un operatore lineare A in uno spazio normato completo X che sia definito
e continuo in un sottoinsieme denso U puo essere esteso ad un operatore continuo definito
sull’intero X.
Dim: Vale ‖Ax‖ ≤ ‖A‖‖x‖ in U . Poiche U e denso in X, ogni x ∈ X sara limite di una
successione di elementi xn in U . Poiche xn converge, sara di Cauchy, quindi ‖xn−xm‖ < ε
per n,m sufficientemente grandi. Da ‖Axn −Axm‖ = ‖A(xn − xm)‖ ≤ ‖A‖‖xn − xm‖ <ε‖A‖ segue che la successioneAxn e di Cauchy, e quindi, per la completezza diX, converge
ad un elemento che chiamiamo Ax. Prendendo il limite dell’equazione ‖Axn‖ ≤ ‖A‖‖xn‖otteniamo ‖Ax‖ ≤ ‖A‖‖x‖. La mappa x → Ax definisce quindi un’estensione di A
all’intero spazio X. L’estensione e ancora un operatore continuo con la stessa norma di
A definito in U .2
A si puo poi estendere ad H in molti modi possibili. Il piu semplice e richiedere, ad
esempio, che si annulli in D(A)⊥
. In questo modo si ottiene un’estensione continua di A
all’intero H. Nel seguito supporremo pertanto che ogni operatore continuo sia definito
sull’intero H.
Come abbiamo visto, gli operatori non continui sono invece definiti solo su un sottoin-
sieme di H e, in generale, non sono estendibili all’intero H. In questo caso e importante
specificare il dominio di definizione. Poiche le proprieta degli operatori possono variare
a seconda dell’insieme di definizione, nel seguito, la parola operatore implicitamente in-
dichera la coppia (A,D(A)). E ragionevole richiedere almeno che il dominio D(A) sia
un sottoinsieme denso di H. La mancanza di continuita viene solitamente rimpiazzata
da una condizione piu debole ma sufficiente per molte applicazioni, la chiusura. Un
operatore si dice chiuso se le due condizioni xn → x e Axn → y implicano y = Ax1. Richiederemo sempre agli operatori non continui di essere densamente definiti (cioe
D(A) = H) e chiusi.
1.5 Operatori autoaggiunti e unitari
Dato un operatore (A,D(A)) densamente definito inH (cioeD(A) = H) esiste l’operatore
aggiunto (A∗,D(A∗)) che soddisfa
(Ax, y) = (x,A∗y), x ∈ D(A), y ∈ D(A∗) (15)
ed e definito in
D(A∗) = y ∈ H|Ly : H → C, x→ (Ax, y) funzionale lineare continuo (16)
1Nel caso di operatori continui la sola condizione xn → x implica Axn → Ax. Nel caso di operatori
non continui Axn potrebbe anche non convergere. Per operatori chiusi, se xn converge a x e Axnconverge, quest’ultimo deve convergere a Ax. La definizione di chiusura si puo riformulare in maniera
piu semplice cosı: un operatore A si dice chiuso se il suo grafico, cioe l’insieme delle coppie (x,Ax),e un sottoinsieme chiuso di H ×H.
6

Nel caso di operatori continui l’equazione (15) vale per tutti gli x, y ∈ H. Nel caso di
operatori non continui, l’aggiunto e definito nel dominio indicato, che potrebbe essere
diverso da quello di A.
L’esistenza dell’aggiunto e garantita dal teorema di Riesz. Per y ∈ D(A∗) fissato, la
mappa Ly : D(A) → C : x → (Ax, y) e un funzionale lineare continuo definito in
D(A). Poiche D(A) e denso in H, il teorema 4 garantisce che Ly si puo estendere ad
un funzionale continuo su H. Per il teorema di Riesz, esiste allora z ∈ H tale per cui
Ly(x) = (Ax, y) = (x, z) per ogni x. z dipendera da y: chiamiamolo z = A∗y. La mappa
A∗ che associa ad ogni y uno z e un operatore lineare che soddisfa l’equazione (15).
Esempio 1 Ogni operatore A in CN e associato ad una matrice Aij. Calcoliamo la
matrice associata a A∗. Usando l’equazione (11): (A∗)ij = (A∗ej, ei) = (ej, Aei) =
(Aei, ej) = Aji. La matrice dell’aggiunto di A e quindi la matrice aggiunta (o coniugata
hermitiana), cioe la matrice trasposta coniugata: A∗ij = Aji.
Non e difficile dimostrare che
Teorema 3: Se A e continuo anche A∗ e un operatore continuo e ‖A∗‖ = ‖A‖. Inoltre
A∗∗ = A.
Dim: Se A e continuo, e anche limitato: ‖A‖ < ∞. Usando l’identita di Schwarz,
otteniamo:
|(A∗x, y)| = |(x,Ay)| ≤ ‖x‖‖Ay‖ ≤ ‖x‖‖A‖‖y‖ (17)
Scegliendo y = A∗x otteniamo: ‖A∗x‖2 ≤ ‖x‖‖A‖‖A∗x‖ cioe ‖A∗x‖ ≤ ‖x‖‖A‖; ne segue
che A∗ e limitato, quindi continuo, con
‖A∗‖ ≤ ‖A‖. (18)
In particolare, visto che A∗ e continuo, anche A∗∗ esiste ed e continuo; l’equazione (15)
ci dice che (A∗∗x, y) = (x,A∗y) = (Ax, y) per ogni x, y e quindi A∗∗ = A. La disug-
uaglianza (18) applicata a A∗∗ ci dice che ‖A‖ = ‖A∗∗‖ ≤ ‖A∗‖, da cui ‖A∗‖ = ‖A‖.2
Si puo dimostrare [1] che il teorema precedente vale per operatori illimitati nella seguente
forma: se A e chiuso e densamente definito, A∗ e anch‘esso chiuso e densamente definito
e soddisfa A∗∗ = A.
Considereremo tre classi importanti di operatori:
1. Operatori autoaggiunti. A si dice autoaggiunto se A = A∗.
7

Osservazione importante: nella definizione di autoaggiuntezza, l’affermazione A = A∗
va intesa come: (A,D(A)) = (A∗,D(A∗)). puo succedere che, dato A definito su D(A), A∗
esista e coincida con A in D(A) ma sia definito in un dominio piu ampio D(A∗) ⊃ D(A).
In questo caso l’operatore e solo formalmente autoaggiunto. Possiamo quindi definire
due forme di autoaggiuntezza:
A e simmetrico se vale
(Ax, y) = (x,Ay), x, y ∈ D(A) (19)
Questa condizione garantisce semplicemente che A∗ esiste e coincide con A in D(A). In
generale A∗ sara un’estensione di A: D(A∗) ⊃ D(A).
A e autoaggiunto se vale A ≡ A∗, cioe se A e A∗ coincidono come operatori (dominio
incluso!): D(A) = D(A∗).
Come vedremo, gli operatori autoaggiunti hanno proprieta che gli operatori simmetrici
non possiedono. Per operatori continui, che non hanno problemi di dominio, autoaggiun-
tezza e simmetria coincidono.
Esempio 1: nel caso finito-dimensionale, A e autoaggiunto se lo e la matrice corrispon-
dente: Aij = Aji. Una matrice con questa proprieta si chiama anche simmetrica (nel
caso reale) o hermitiana (nel caso complesso).
Esempio 2: un altro esempio importante di operatore autoaggiunto e l’operatore A =
−i∂x in L2[a, b], −∞ ≤ a < b ≤ ∞. L’operatore non e continuo. Consideriamo la formula
(15) per funzioni f, g molto regolari, in modo che tutte le formule e le manipolazioni
formali abbiano senso (notare che la i nella definizione di A e importante):
(−i∂xf, g) =
∫ b
a
(−if ′(t)g(t))dt = −ifg|ba +
∫ b
a
f(t)(−ig′(t))dt = −ifg|ba + (f,−i∂xg)
(20)
Condizione necessaria perche l’operatore sia autoaggiunto e che il termine di bordo si
annulli. E quindi necessario specificare un dominio D(A), ovvero dire quali sono le
condizioni al contorno delle funzioni considerate. In particolare, l’annullarsi dei termini
di bordo per tutte le funzioni f, g ∈ D(A) garantisce l’equazione
(Af, g) = (f, Ag), f, g ∈ D(A) (21)
garantisce cioe che l’operatore e simmetrico. A∗ e quindi un’estensione di A. Tipicamente
D(A) viene inizialmente scelto sulla base del problema in considerazione, in modo da
8

annullare i termini al bordo. Se una considerazione piu attenta mostra che in realta A∗ e
definito su un dominio piu ampio, si puo tentare di estendere il dominio di A sperando che
quello di A∗ si restringa. Per approssimazioni successive si puo arrivare ad un operatore
autoaggiunto: D(A) ⊂ D(A1) ⊂ ... ⊂ D(Aaut) ⊂ ... ⊂ D(A∗1) ⊂ D(A∗), dove Aaut ≡A∗aut, dominio incluso. Esistono molti domini diversi in cui A risulta simmetrico, mentre
ne esiste uno solo in cui A e autoaggiunto.
Consideriamo, ad esempio, l’operatore −i∂x in L2(R). Ogni funzione in L2(R) si annulla
all’infinito e i termini al bordo nell’equazione (20) si annullano automaticamente. Occorre
pero scegliere ancora il dominio dell’operatore imponendo opportuni requisiti di regolarita
alle funzioni. La scelta piu semplice di un dominio denso in L2(R) composto da funzioni
molto regolari e S(R). L’operatore −i∂x non e pero autoaggiunto S(R). Esistono infatti
funzioni g /∈ S(R) che soddisfano la condizione (−i∂f, g) = (f,−i∂g) per ogni f ∈ S(R).
Si puo dimostrare che −i∂x in L2(R) e simmetrico nel dominio S(R) e autoaggiunto nel
dominio fAC , f ′′ ∈ L2(R) 2.
Consideriamo ora l’operatore−i∂x definito sull’intervallo limitato [0, 1]. Definiamo cinque
operatori diversi, che differiscono solo per la scelta del dominio :
AL = −i∂x D(AL) = hAC , h′ ∈ L2[0, 1]|h(0) = 0AR = −i∂x D(AR) = hAC , h′ ∈ L2[0, 1]|h(1) = 0A1 = −i∂x D(A1) = hAC , h′ ∈ L2[0, 1]|h(0) = h(1) = 0A2 = −i∂x D(A2) = hAC , h′ ∈ L2[0, 1]|h(0) = h(1)A3 = −i∂x D(A3) = hAC , h′ ∈ L2[0, 1] (22)
Non e difficile verificare che A1 e simmetrico, A2 e autoaggiunto, A∗1 = A3 e A∗L = AR.
Cominciamo con l’osservare che i termini di bordo nell’equazione (20) non si annullano
per funzioni f, g che appartengono ai domini di AL, AR; questi operatori non sono quindi
simmetrici. Calcoliamo l’aggiunto di AL: questo dovra soddisfare l’equazione (ALf, g) =
(f, A∗Lg) per ogni f ∈ D(AL) e g ∈ D(A∗L). Consideriamo la formula (20): AL e ARagiscono entrambi come −i∂x e, se scegliamo f(0) = 0, i termini al bordo si cancellano
per ogni funzione che soddisfi g(1) = 0. Ne segue che (ALf, g) = (f, ARg) per ogni
f ∈ D(AL) e g ∈ D(AR), da cui concludiamo che A∗L = AR3. Consideriamo ora A1, A2
2Il suffisso AC indica che la funzione deve essere scelta assolutamente continua (cfr Rudin, Real and
Complex Analysis). Questa richiesta serve a garantire la validita del teorema fondamentale del calcolo
integrale (f(b) − f(a) =∫ b
af ′(x)dx) e la possibilita di integrare per parti. E un requisito tecnico che
serve ad eliminare alcune funzioni patologiche che pure sono L2 con derivata L2. Alcuni testi riformulano
le condizioni fAC , f′ ∈ L2 in maniera equivalente richiedendo di lavorare nello spazio di Sobolev H1 (che
e uno spazio di distribuzioni).3Per essere precisi, abbiamo solo dimostrato che A∗L e un‘estensione di AR: il dominio di A∗L potrebbe
essere piu grande di quello di AR. Possiamo dimostrare che A∗L ≡ AR come segue. Sia dato g ∈ D(A∗L),
9

e A3: abbiamo una catena di operatori, con domini che soddisfano D(A1) ⊂ D(A2) ⊂D(A3) e che coincidono a coppie nell’intersezione dei loro domini. Gli operatori A1 e A2
sono simmetrici poiche i termini di bordo nell’equazione (20) si annullano per funzioni
f, g ∈ D(Ai), i = 1, 2. A3 non e invece simmetrico. Notiamo tuttavia che A1 non e
autoaggiunto. Infatti i termini di bordo nell’equazione (20) si annullano anche nel caso
in cui f si annulla agli estremi e g e arbitraria; per ogni coppia di funzioni f ∈ D(A1)
e g ∈ D(A3) vale l’equazione (A1f, g) = (f, A3g). Ne concludiamo che A∗1 = A3. In
maniera analoga ci si puo convincere che A2 = A∗2. A1 e quindi un operatore simmetrico
ma non autoaggiunto, mentre A2 e autoaggiunto.
2. Operatori unitari. U si dice unitario se UU∗ = U∗U = I, dove I e l’identita. Nel
caso finito-dimensionale, U e unitario se lo e la matrice corrispondente. Gli operatori
unitari preservano norma e prodotto scalare: infatti (Ux, Uy) = (x, U∗Uy) = (x, y). U
e ovviamente invertibile con inverso U∗. Un operatore unitario e quindi un’isomorfismo
di H in se stesso. Visto che ‖U(x)‖ = ‖x‖, U e necessariamente continuo e di norma
1. E anche possibile pensare agli operatori unitari come cambi di base nello spazio di
Hilbert: se φi e un s.o.n.c. anche Uφi lo e, come si verifica facilmente usando le
proprieta che abbiamo appena discusso. Un esempio notevole di operatore unitario in
L(R) e l’operatore Trasformata di Fourier.
3. Proiettori. Per ogni sottospazio chiuso S di H abbiamo la decomposizione ortogonale
H = S + S⊥. Ogni x si scrive in maniera unica come x = y + z con y ∈ S, z ∈ S⊥. Il
proiettore P sul sottospazio S e definito dalla formula Px = y.
Teorema: P e continuo, autoaggiunto e idempotente (cioe P 2 = P ).
Dim: P 2 = P e ovvio. Da ‖x‖2 = ‖y‖2 + ‖z‖2, otteniamo ‖Px‖2 = ‖y‖2 ≤ ‖x‖2.
Quindi P e continuo e ‖P‖ ≤ 1. Infine, date le decomposizioni ortogonali di due vettori
xi = yi + zi, i = 1, 2 con Pxi = yi, (Px1, x2) = (y1, x2) = (y1, y2 + z2) = (y1, y2) =
(y1 + z1, y2) = (x1, Px2) quindi P e autoaggiunto. 2
1.6 Autovalori e teoria spettrale
La teoria spettrale generalizza agli spazi di Hilbert lo studio di autovalori ed autovettori.
E noto dall’algebra elementare che ogni matrice autoaggiunta ha autovalori reali e una
che quindi soddisfa (ALf, g) = (f,A∗Lg) per ogni f ∈ D(AL). A∗Lg esiste ed e L2. Esiste quindi anche
φ(x) = −i∫ 1
xA∗Lgdx che soddisfa φ(1) = 0 e −i∂xφ = A∗Lg. Vogliamo dimostrare che φ ≡ g, da cui
deduciamo che l’azione di A∗L su g e una derivata e che g(1) = 0, cioe A∗L = AR. Da (g,ALf) =
(A∗Lg, f) =∫ 1
0A∗Lgf = −i
∫ 1
0∂φf = −iφf |10 +
∫ 1
0φ(−i∂f) = (φ,ALf) deduciamo (g − φ,ALf) = 0.
Non e difficile convincersi che l’immagine di AL e perlomeno densa in L2: concludiamo che g = φ. Un
ragionamento analogo puo essere usato per rendere rigorosi gli altri argomenti riportati nel testo.
10

base ortonormale di autovettori. In questa base la matrice e diagonale. In uno spazio
di Hilbert e necessario estendere il concetto di autovalore introducendo autovalori gen-
eralizzati e lo spettro di un operatore. La teoria spettrale garantisce che un operatore
autoaggiunto ha spettro reale e puo essere diagonalizzato.
Ricordiamo che λ ∈ C e x ∈ H non nullo si definiscono autovalore e autovettore
dell’operatore A in H se vale
Ax = λx (23)
Il nucleo Ker(A−λI) dell’operatore A−λI e quindi non nullo e si definisce autospazio
associato all’autovalore λ. L’operatore A− λI non e ovviamente invertibile.
E utile generalizzare il concetto di autovalore estendendolo a tutti i numeri λ ∈ C per
cui A− λI non e invertibile nel senso della seguente definizione:
Def: Si definisce spettro σ(A) dell’operatore A in uno spazio di hilbert H l’insieme dei
λ ∈ C per cui (A− λI)−1 /∈ B(H). Lo spettro si divide naturalmente in tre sottoinsiemi
disgiunti:
Spettro discreto: l’insieme dei λ ∈ C per cui A − λI non e iniettivo, e quindi non e
invertibile come mappa lineare
Spettro continuo: l’insieme dei λ ∈ C per cui A−λI e invertibile come mappa lineare,
e densamente definito ma (A− λI)−1 : Im(A− λI)→ H non e un operatore continuo
Spettro residuo: l’insieme dei λ ∈ C per cui A− λI e invertibile come mappa lineare
ma non e densamente definito
Lo spettro discreto corrisponde all’insieme degli autovalori di A. Infatti se A−λI non
e iniettivo, Ker(A−λI) 6= 0 ed esiste almeno una soluzione non nulla dell’equazione Ax =
λx. Lo spettro continuo e la vera novita per gli operatori in spazi infinito dimensionali.
Poiche A − λI e invertibile, Ker(A − λI) = 0 e λ non e un autovalore. λ appartenente
allo spettro continuo e pero un autovalore approssimato:
Teorema 5: Per ogni λ ∈ C appartenente allo spettro continuo, esiste una successione
di vettori xn tali per cui ‖Axn − λxn‖ → 0.
Dim: (A − λI)−1 non e continuo, quindi esiste una sucessione yn tale per cui ‖(A −λI)−1yn‖ ≥ n‖yn‖. Definendo wn = (A − λI)−1yn si ha che ‖Awn − λwn‖ ≤ ‖wn‖/n.
Infine se xn = wn/‖wn‖ si ha che ‖Axn − λxn‖ ≤ 1/n→ 0. 2
11

L’equazione agli autovalori puo quindi essere approssimata a piacere quando λ appartiene
allo spettro continuo. Ovviamente la successione xn non puo convergere in H. In caso
contrario, se xn → x ∈ H, il teorema 5 garantisce che Axn → λx, e quindi, sotto la
sola condizione che A sia chiuso, Ax = λx e λ sarebbe un autovalore. Tipicamente,
esiste uno spazio topologico H ⊂ Y di funzioni o distribuzioni a cui puo essere estesa la
definizione dell’operatore A in cui la successione xn ∈ H converge a un vettore x ∈ Ye vale l’equazione Ax = λx come equazione per vettori e operatori in Y . Per questa
ragione λ appartenente allo spettro continuo si chiama anche autovalore generalizzato e
la distribuzione x autofunzione generalizzata. Lo spettro residuo e il meno interessante.
Gli operatore interessanti hanno spettro residuo vuoto.
Teorema 6: Se A e autoaggiunto, i suoi autovalori sono reali e gli autovettori cor-
rispondenti ad autovalori diversi sono mutuamente ortogonali. L’intero spettro σ(A) e
un sottoinsieme dell’asse reale e lo spettro residuo e vuoto.
Dim: Dato u 6= 0 con Au = λu: λ(u, u) = (λu, u) = (Au, u) = (u,Au) = (u, λu) =
λ(u, u). Da (u, u) 6= 0 segue che λ = λ, cioe gli autovalori sono reali. Analogamente,
siano u1, u2 due autovettori corrispondenti a due autovalori distinti: Aui = λiui, i = 1, 2.
λ1(u1, u2) = (λ1u1, u2) = (Au1, u2) = (u1, Au2) = (u1, λ2u2) = λ2(u1, u2). Dalla realta
degli autovalori segue che (λ1 − λ2)(u1, u2) = 0. Infine dal fatto che λ1 6= λ2, segue che
(u1, u2) = 0. Dimostriamo ora che lo spettro continuo e reale e lo spettro residuo vuoto.
Dato λ = λ1 + iλ2 con λi ∈ R calcoliamo
‖(A− λI)x‖2 = ‖(A− λ1I)x− iλ2x‖2 = ‖(A− λ1I)x‖2 + |λ2|2‖x‖2 (24)
(i termini misti si annullano per la simmetria di A: ((A − λ1I)x,−iλ2x) + (−iλ2, (A −λ1I)x) = iλ2(((A − λ1I)x, x) − (x, (A − λ1I)x)) = 0). Dall’equazione precedente segue
che ‖(A − λI)x‖2 ≥ |λ2|2‖x‖2. Definendo y = (A − λI)x si ha che ‖(A − λI)−1y‖2 ≤‖y‖2/|λ2|2. Se λ2 6= 0 l’operatore inverso (A − λI)−1 e continuo e quindi ogni λ con
parte immaginaria non nulla non appartiene allo spettro continuo. Infine, se λ non e un
autovalore anche λ non lo e, poiche gli autovalori sono reali. Quindi Ker(A− λI) = 0.Ora, se x ∈ Ker(A − λI) allora 0 = (Ax − λx, y) = (x,Ay) − λ(x, y) = (x, (A − λI)y)
per ogni y a causa dell’autoaggiuntezza di A; quindi x ∈ (Im(A − λI))⊥. Ne segue
(Im(A − λI))⊥ = Ker(A − λI) ≡ 0. L’immagine dell’operatore A − λI, che e il
dominio dell’operatore inverso (A− λI)−1 e quindi denso in H e λ non puo appartenere
allo spettro residuo che e quindi vuoto. 2
Si dimostra analogamente che
Teorema 7: Se A e unitario, i suoi autovalori sono numeri complessi di modulo unitario
12

e gli autovettori corrispondenti ad autovalori diversi sono mutuamente ortogonali. Lo
spettro e un sottoinsieme del cerchio unitario e lo spettro residuo e vuoto.
Esempio 1: consideriamo il caso finito-dimensionale. E ben noto che ogni matrice
autoaggiunta puo essere diagonalizzata. Infatti l’equazione agli autovalori (23) si riduce
ad un‘equazione matriciale Ax = λx in CN . Da (A − λI)x = 0 segue che gli autovalori
soddisfano l’equazione caratteristica
det(A− λI) = 0 (25)
Questa e un’equazione polinomiale di gradoN in λ che quindi ha esattamenteN soluzioni.
Ne concludiamo che esistono esattamente N autovalori λi, i = 1, ..., N . Se sono tutti
distinti, il teorema 6 garantisce l’esistenza di N autovettori mutuamente ortogonali.
Possiamo costruire una base o.n.c. ui, i = 1, ..., N usando gli autovettori oppor-
tunamente normalizzati. Questo cambiamento di base e quello che nei corsi di alge-
bra lineare si usa per diagonalizzare una matrice simmetrica o autoaggiunta. Nella
base ui, infatti, la matrice associata ad A e diagonale, A = diag(λ1, ..., λN), poiche
Aij = (Auj, ui) = λj(uj, ui) = λiδij. Nel caso ci siano autovalori multipli, ognuno di
questi e associato a un sottospazio di CN di dimensione pari alla molteplicita; in ognuno
di questi sottospazi possiamo scegliere autovettori mutuamente ortogonali in modo da
completare un s.o.n.c. in CN .
Esempio 2: consideriamo l’operatore A2 = −i∂x autoaggiunto in D(A2) = fAC , f ′ ∈L2[0, 1]|f(0) = f(1). I suoi autovalori e autovettori si determinano dall’equazione dif-
ferenziale −iy′ = λy che ha soluzioni y = Aeiλx. Le condizioni al contorno (periodicita
di y) impongono λ = 2πn = 0, 1, 2, .... L’insieme degli autovettori, opportunamente
normalizzati, un = e2πnx e un s.o.n.c. in L2[0, 1] (base di Fourier).
Vediamo che l’esempio 2 generalizza in maniera molto semplice il risultato valido in
uno spazio finito-dimensionale: gli autovettori dell’operatore autoaggiunto possono essere
scelti in modo da formare un s.o.n.c. in H. Questa situazione non si generalizza ad ogni
operatore in uno spazio di Hilbert, come dimostra l’esempio seguente:
Esempio 3: consideriamo ancora l’operatoreA = −i∂x definito pero inD(A) = fAC , f ′ ∈L2(R). E anch‘esso autoaggiunto. I suoi autovalori e autovettori si determinano ancora
una volta dall’equazione differenziale −iy′ = λy che ha soluzioni y = Aeiλx. Queste
soluzioni pero non sono L2(R) per nessun valore di λ. L’operatore A non possiede alcun
autovalore ne autovettore. Notiamo tuttavia che, sebbene non sia possibile trovare alcun
vettore x ∈ H che soddisfi l’equazione Ax = λx, e possibile trovare vettori xn ∈ H che
13
approssimino questa equazione con un errore arbitrariamente piccolo per ogni λ reale:
‖Axn − λxn‖ ≤ ε. Infatti non e difficile definire delle funzioni xn ∈ C1(R), nulle al
di fuori dell’intervallo (−n − 1, n + 1) e coincidenti con eiλx nell’intervallo (−n, n) che
soddisfino alla proprieta limn→∞ ‖Axn − λxn‖ = 0 per λ reale. Si puo dimostrare infatti
[1] che lo spettro dell’operatore e puramente continuo e coincidente con l’asse reale. Le
funzioni uλ = eiλx con λ ∈ R vengono chiamate autovettori generalizzati. In effetti le
funzioni xn che soddisfano la proprieta dell’autovalore approssimato in questo esempio
convergono a uλ = eiλx quando n tende all’infinito. Le funzioni uλ non appartengono allo
spazio di Hilbert L2(R) ma possono essere interpretate come elementi di uno spazio piu
ampio di distribuzioni Y . Nello spazio Y l’equazione −i∂xuλ = λuλ e soddisfatta.
Un operatore autoaggiunto generico possiede sia spettro discreto che spettro continuo.
Il teorema spettrale viene formulato come segue. E possibile associare ad ogni auto-
valore generalizzato λ una distribuzione uλ chiamata autovettore generalizzato. uλe definito come limite nello spazio delle distribuzioni dei vettori xn ∈ H che appaiono
nella definizione di autovalore generalizzato. La successione xn non converge ad alcun
elemento di H, ma converge nel senso delle distribuzioni a uλ che non appartiene ad H.
Teorema Spettrale: ogni operatore autoaggiunto A in uno spazio di Hilbert e caratter-
izzato dai suoi autovalori e autovettori λn, un che formano un s.o.n. (spettro discreto) e
da una o piu famiglie continue di autovalori e autovettori generalizzati (spettro continuo)
λ, uλ tali per cui ogni elemento dello spazio di Hilbert si puo scrivere come
f =∑n
anun +
∫a(λ)uλdλ (26)
Attraverso il teorema spettrale abbiamo effettivamente diagonalizzato l’operatore e ab-
biamo la possibilita di sviluppare il generico elemento x ∈ H nella base degli autovettori,
ordinari e generalizzati. La diagonalizzazione di A segue dalla formula
Af =∑n
λnanun +
∫λa(λ)uλdλ (27)
Per una definizione corretta dell’integrale nella precedente formula rimandiamo a [1].
Esempio 3. Continuazione: ogni funzione in L2(R) si puo sviluppare nel set di au-
tovettori generalizzati uλ nel senso dell’equazione (26):
f(x) =
∫a(λ)eiλxdλ, (28)
14

Il teorema spettrale, in questo caso, non e altro che l’affermazione che ogni funzione
in L2(R) possiede una trasformata di Fourier. L’operatore, in questo caso, ha spettro
puramente continuo, coincidente con l’asse reale.
Esempio 4: l’operatore posizione in L2[a, b], −∞ ≤ a < b ≤ ∞ e autoaggiunto nel
dominio D(x) = f ∈ L2[a, b]|xf ∈ L2[a, b] come si verifica facilmente. L’equazione
xψ = λψ richiede xψ(x) = λψ(x) che non puo essere risolta da nessuna funzione ψ(x).
L’operatore x non ha quindi autovalori. Si puo pero’ dimostrare [1] che il suo spettro
e puramente continuo e coincide con l’intervallo [a, b]. L’equazione agli autovalori e
risolta dalle distribuzioni uλ = δ(x − λ) per λ ∈ [a, b]. E facile verificare che esiste
una successione di funzioni in L2[a, b] che converge a uλ e che soddisfa la proprieta
dell’autovalore apprssimato. Il teorema spettrale si riduce in questo caso alla banale
formula
ψ(x) =
∫ b
a
δ(x− λ)ψ(λ)dλ (29)
che e valida per ogni ψ ∈ L2[a, b].
Esiste una classe di operatori che ha spettro puramente discreto. Per questi il teorema
spettrale vale nella forma:
Teorema Spettrale per operatori a spettro discreto: l’insieme degli autovettori
di un operatore autoaggiunto A con spettro puramente discreto possono essere scelti in
modo da formare un s.o.n.c.
Gli operatori con spettro puramente discreto generalizzano la teoria spettrale valida per
spazi finito dimensionali in una forma particolarmente semplice. Ogni elemento f dello
spazio di Hilbert si puo sviluppare nella base degli autovettori di A, ui,
f =∑i
aiui (30)
La base degli autovettori, in analogia con quanto succede nel caso finito-dimensionale,
e la base in cui l’operatore e diagonale (Aui = λiui). Questa proprieta si esprime
formalmente con l’equazione
Af =∑i
λiaiui (31)
che risulta essere vera anche se A non e continuo. Usando l’isomorfismo H ∼ l2, f → aideterminato dalla scelta della base ui, l’operatore A puo essere rappresentato come una
matrice (infinito-dimensionale) diagonale, con entrate uguali agli autovalori.
15

Per concludere, e opportuno notare che il teorema 6 e il teorema spettrale valgono
per operatori autoaggiunti e non e detto che valgano per operatori che sono soltanto sim-
metrici. Operatori simmetrici hanno spettro discreto e continuo reale, ma genericamente
lo spettro residuo non e vuoto e complesso ed infine il teorema spettrale non e valido.
1.7 Esempi: equazioni integrali, alle derivate ordinarie e parziali
1.7.1 Equazioni integrali
Gli operatori integrali sono particolarmente semplici. Alcune applicazioni storiche della
teoria degli spazi di Hilbert sono infatti alle equazioni integrali.
Consideriamo un operatore integrale definito in L(Ω) dove Ω e un sottoinsieme di Rn.
K : f ∈ L2(Ω) → Kf(x) =
∫Ω
k(x, y)f(y)dy (32)
Se il nucleo integrale k(x, y) ∈ L2(Ω× Ω) l’operatore K e continuo. Infatti, dalla disug-
uaglianza di Holder segue che
‖Kf‖2 =
∫Ω
|∫
Ω
k(x, y)f(y)dy|2dx ≤∫
Ω
(
∫Ω
|k(x, y)|2dy∫
Ω
|f(w)|2dw)dx
≤ ‖f‖2
∫Ω×Ω
|k(x, y)|2dxdy (33)
E facile verificare che se k(x, y) = k(y, x), K e autoaggiunto. K in realta e piu che
continuo, e un operatore compatto, cioe manda insiemi limitati in insiemi la cui chiusura e
compatta [1]. Lo spettro degli operatori compatti e puramente discreto e particolarmente
semplice.
Teorema 8: Un operatore autoaggiunto compatto ha autovalori reali λn → 0 ed au-
tovettori un che formano un s.o.n.c. Lo spettro e discreto con al piu uno spettro continuo
che consiste del solo punto λ = 0 se questo non e un autovalore.
1.7.2 Equazioni Differenziali Ordinarie: Problemi agli autovalori
Un problema classico delle equazioni differenziali ordinarie e il problema agli autovalori
o problema al contorno. Questo tipo di problema e naturale in Meccanica Quantistica e
si incontra spesso anche in fisica classica, in particolare quando si risolvono problemi al
contorno per equazioni differenziali alle derivate parziali.
Esempio 1: sia data l’equazione differenziale lineare del secondo ordine dipendente da
un parametro λ
y′′ + λy = 0 (34)
16

Il teorema di esistenza e unicita garantisce che, date le condizioni iniziali (problema di
Chauchy)
y(x0) = y0
y′(x0) = y1 (35)
la soluzione esiste, e unica e dipende continuamente dai dati iniziali. Chiediamoci ora
se la stessa equazione ha soluzioni nell’intervallo [x0, x1] che soddisfano il problema al
contorno
y(x0) = 0
y(x1) = 0 (36)
Un equazione del II ordine ha sempre due soluzioni linearmente indipendenti yi(x;λ), i =
1, 2 e la generica soluzione si puo esprimere come loro combinazione lineare
y(x) = c1y1(x;λ) + c2y2(x;λ). (37)
λ appare in generale come parametro nell’espressione delle soluzioni. Sappiamo che il
problema di Chauchy (35) ha sempre una soluzione. Nel caso del problema al contorno
(36), c‘e’ sempre la soluzione banale c1 = c2 = 0. Esistera una seconda soluzione se e
solo se il sistema
c1y1(x0;λ) + c2y2(x0;λ) = 0
c1y1(x1;λ) + c2y2(x1;λ) = 0 (38)
ha una soluzione. Solo per alcuni valori particolari di λ, quelli per cui la matrice dei
coefficienti yi(xj;λ) ha determinante nullo, esistera una soluzione non banale al problema
al contorno. Questi valori sono chiamati autovalori. Possiamo riformulare il problema
in questi termini: risolvere l’equazione agli autovalori Ly = λy per l’operatore L =
−∂2/∂x2 nel dominio D(L) = fAC , f ′′ ∈ L2[x0, x1]|f(x0) = f(x1) = 0. L e il quadrato
dell’operatore A1 = −i∂x; e simmetrico e, coi metodi della sezione 1.4, si puo verificare che
e anche autoaggiunto 4. Il problema e cosı ridotto alla ricerca di autovalori e autovettori
di un operatore autoaggiunto in uno spazio di Hilbert.
4Notiamo che −i∂x, con le condizioni f(x0) = f(x1) = 0, non e autoaggiunto mentre il suo quadrato
−∂2x lo e. Le condizioni al contorno da imporre agli operatori possono variare col numero di derivate,
poiche questo influisce sui termini provenienti dall’integrazione per parti. Intuitivamente, il numero di
condizioni da imporre ad un operatore differenziale con derivate ordinarie e pari all’ordine dell’operatore
stesso: f(x0) = f(x1) = 0 contiene due condizioni su f ed e ragionevole da imporre per un operatore
del secondo ordine ed e invece troppo restrittivo per un operatore del prim’ordine. Per evitare errori, e
bene verificare l’autoaggiuntezza esaminando i termini al bordo caso per caso.
17

Esaminiamo il caso generale di un‘equazione differenziale lineare del II ordine:
Ly = λy (39)
con
Ly = a2(x)y′′ + a1(x)y′ + a0(x), a2(x) > 0. (40)
E facile verificare che (ridefinendo L e λ) si puo sempre ricondurre il problema al seguente:
Ly = λωy, L = − d
dx
(p(x)
d
dx
)+ q(x). (41)
con
p(x) = e∫
(a1/a2)dx, q(x) = −a0
a2
e∫
(a1/a2)dx, ω(x) =e∫
(a1/a2)dx
a2
(42)
Notiamo che p(x) > 0 e ω(x) > 0.
Si definisce problema di Sturm-Liouville (SL) il problema agli autovalori:
Ly = λωy , a ≤ x ≤ b
α1y(a) + α2y′(a) = 0
β1y(b) + β2y′(b) = 0 (43)
con αi, βi reali e con almeno uno degli αi e uno dei βi diversi da zero. Nell’equazione (43)
abbiamo scelto condizioni al contorno indipendenti per i due estremi. E possibile scegliere
altre condizioni al contorno, ad esempio si possono scegliere condizioni di periodicita:
f(a) = f(b) , f ′(a) = f ′(b) (44)
oppure due condizioni piu complicate che coinvolgano ciascuna f(a), f(b), f ′(a), f ′(b).
Come discusso a breve, ogni set di condizioni con la proprieta di rendere autoaggiunto
l’operatore L definisce un buon problema di SL.
Vogliamo formalizzare il problema in un opportuno spazio di Hilbert. Dalla teoria gen-
erale delle equazioni differenziali, sappiamo che le soluzioni del problema (43) definito in
un intervallo limitato [a, b] e con funzioni p, q, ω sufficientemente regolari sono anch’esse
funzioni regolari, in particolare sono L2[a, b].
Osservazione: della presenza della funzione ω in (43) si puo facilmente tener conto con-
siderando la misura ω(x)dx in [a, b]. Consideriamo cioe L2ω[a, b] = f |
∫ ba|f(x)|2ω(x)dx <
∞ con prodotto scalare (f, g)ω =∫ baf(x)g(x)ω(x)dx. Il problema (43) per l’operatore
Lω = L/ω diventa un problema agli autovalori Lωy = λy in L2ω. Notiamo che nel
prodotto scalare (Lωf, g)ω =∫ ba(Lf)g tutti i fattori di ω si cancellano. Senza perdita di
18

generalita si puo anche porre ω = 1: la teoria generale si ottiene sostituendo ovunque
L→ Lω, (f, g)→ (f, g)ω.
Consideriamo quindi il problema agli autovalori:
Ly = λy
D(L) = fAC , f ′′ ∈ L2[a, b]ω|α1y(a) + α2y′(a) = β1y(b) + β2y
′(b) = 0 (45)
L e un operatore autoaggiunto. Infatti,
(Lf, g) =∫ ba((−pf ′)′ + qf)gdx = −pf ′g|ba +
∫ bapf ′g′dx+
∫ baqfgdx =
−p(f ′g − fg′)|ba +∫ baf((−pg′)′ + qg) = (f, Lg) (46)
I termini di bordo che vengono dall’integrazione per parti si annullano a causa delle
condizioni al contorno scelte (43) o (44). Ad esempio, per (43) e β2 6= 0, all’estremo
b otteniamo: p(f ′g − fg′)(b) = p(b)(−β1/β2)(fg − fg)(b) = 0. Lo stesso risultato vale
per β2 = 0 e per l’estremo a. L’operatore L e’ quindi simmetrico; coi metodi della
sezione 1.4 si puo dimostrare che e anche autoaggiunto. Lo stesso vale per le condizioni
(44). Condizioni al contorno piu generali dovranno essere scelte in modo che i termini al
bordo dell’integrazione per parti si cancellino e che l’operatore sia autoaggiunto oltre che
simmetrico. Nel caso in cui l’intervallo [a, b] sia illimitato, i termini al bordo valutati nel
punto all’infinito si annullano automaticamente pioche ogni funzione L2[a, b] si annulla
all’infinito. Percio se a o b o entrambi sono infiniti, in questi punti non occorre imporre
alcuna condizione. Si richiede tuttavia di trovare una soluzione L2[a, b]: la condizione
implicita che deve essere imposta all’infinito alle soluzioni dell’equazione differenziale e
di essere a quadrato sommabile. Questa e la condizione naturale da imporre se si vuole
formulare il problema in uno spazio di Hilbert. E anche la condizione naturale da imporre
in un problema di Meccanica Quantistica.
Usando il teorema 6 otteniamo immediatamente
Teorema 9: Dato un sistema di SL formulabile come un problema agli autovalori per
un operatore in uno spazio di Hilbert:
a) gli autovalori sono reali
b) le soluzioni (autovettori) corrispondenti ad autovalori diversi sono ortogonali nel
prodotto scalare di L2ω.
Gli autovettori di un sistema di SL formano un s.o.n. che non e necessariamente
completo, dato che un generico operatore avra anche spettro continuo. Il problema di
19
V=x /2E
E1
2
x
E
V=02
determinare lo spettro di un operatore differenziale e complesso. I metodi piu usati per
determinare lo spettro sono:
I: studiare il risolvente di L. Ogni equazione differenziale ordinaria si puo convertire in
un’equivalente equazione integrale, ottenuta invertendo l’operatore differenziale
Lu(x) = λu(x) , → u(x) = λL−1u(x) ≡∫ b
a
k(x, y)u(y)dy (47)
Il nucleo integrale k(x, y) si chiama funzione di Green associata all’operatore differenziale
L. Gli operatori integrali sono piu semplici studiare e lo spettro di L si puo determinare
studiando lo spettro dell’operatore integrale associato. In particolare, se la funzione di
Green k(x, y) risulta essere a quadrato sommabile, il teorema 8 garantisce che lo spettro
dell’operatore integrale, e quindi lo spettro di L, e puramente discreto. Operatori dif-
ferenziali di questo tipo si chiamano a risolvente compatto. In questo caso gli autovettori
di L formano un s.o.n.c.
II: ridurre, se possibile, l’equazione differenziale ad un’equazione di Schroedinger stazionaria.
Consideriamo l’equazione di Schroedinger stazionaria per una particella sulla retta soggetta
al potenziale V (x)
−d2u
dx2+ V (x)u = Eu (48)
L’equazione e evidentemente della forma SL con p = 1, q = V (x) e ω = 1; per uniformarci
alle notazioni della MQ, abbiamo chiamato E l’autovalore λ. La funzione d’onda u
rappresenta una densita di probabilita, ed e normalizzata∫R |u|
2dx = 1. La condizione
da imporre all’infinito e quindi l’integrabilita L2. Equivalentemente, dobbiamo risolvere
il problema agli autovalori Hu = Eu in L2(R) per l’operatore autoaggiunto H = − d2
dx2+
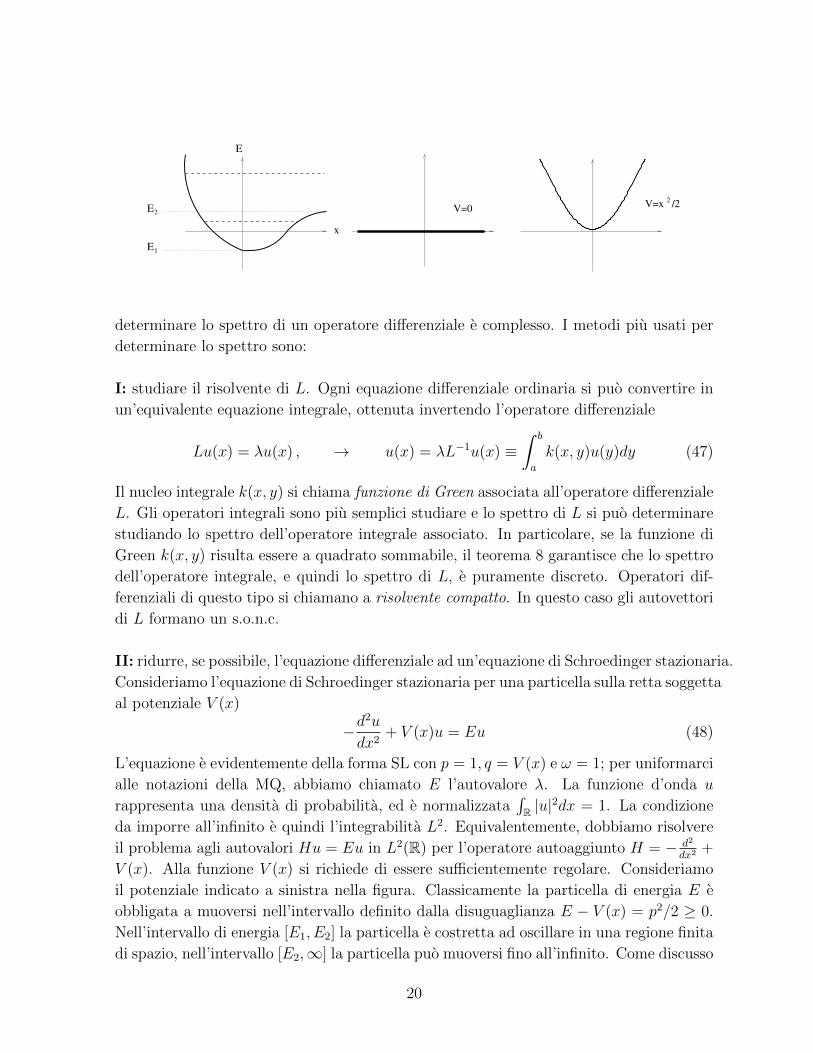
V (x). Alla funzione V (x) si richiede di essere sufficientemente regolare. Consideriamo
il potenziale indicato a sinistra nella figura. Classicamente la particella di energia E e
obbligata a muoversi nell’intervallo definito dalla disuguaglianza E − V (x) = p2/2 ≥ 0.
Nell’intervallo di energia [E1, E2] la particella e costretta ad oscillare in una regione finita
di spazio, nell’intervallo [E2,∞] la particella puo muoversi fino all’infinito. Come discusso
20

in ogni buon testo di MQ, quantisticamente esisteranno dei livelli energetici discreti Enda cercarsi dove il moto classico e limitato in una regione finita, σd(H) = En ⊂[E1, E2] e uno spettro continuo di energie corrispondente ai valori classici dell’energia
per cui il moto e illimitato, σc(H) = [E2,∞]. Notiamo che gli autovalori dell’operatore
H corrispondono solo ai livelli energetici discreti. L’intero insieme dei possibili valori
dell’osservabile energia e associato all’intero spettro dell’operatore H. Gli autovalori
generalizzati uE per E ∈ σc(H) sono tipicamente delle funzioni non in L2(R) che hanno la
forma di onde piane per grande x positivo. Nella figura sono indicati due casi limite. Per
V (x) = 0 lo spettro e puramente continuo σc(H) = [0,∞] con autofunzioni generalizzate
che sono onde piane uE = eipx, E = p2/2. Il caso V (x) = x2/2, corrispondente ad un
oscillatore armonico, ha spettro puramente discreto En = (n+ 1/2) con autofunzioni che
sono i polinomi di Hermite un = Hn(x)e−x2/2.
Un risultato generale e il seguente. Il problema di SL con a e b finiti, p, p′, ω e q
funzioni continue reali in [a, b] e p, ω > 0 il problema si dice regolare. Per sistemi di SL
regolari vale il teorema [1]:
Teorema 10: Gli autovettori di un sistema di SL regolare formano un insieme numerabile
yn che, opportunamente normalizzato, e un s.o.n.c. in L2ω[a, b].
I problemi di SL regolari sono in assoluto i piu semplici ma hanno poche applicazioni.
Esempio 1. continuazione: consideriamo il problema di SL
y′′ + λy = 0, 0 ≤ x ≤ π
y(0) = y(π) = 0 (49)
Il problema e regolare con p = 1, q = 0 e ω = 1. La soluzione generale e y = A sin√λx+
B cos√λx. Le condizioni al contorno impongono B = 0 e sin
√λπ = 0 da cui λ =
n2, n = 1, 2, .... Otteniamo l’insieme di autovalori e autovettori: λn = n2, yn = sinnx.Osserviamo che gli autovalori sono reali, gli autovettori mutuamente ortogonali e che gli
autovettori, opportunamente normalizzati, formano un s.o.n.c.: i seni sono la base di
Fourier (dispari) per il semi-periodo [0, π].
Esempio 1a: consideriamo il problema di SL
y′′ + λy = 0, 0 ≤ x ≤ π
y(0) = y(π)
y′(0) = y′(π) (50)
21

Il problema e anch‘esso regolare. Le condizioni al contorno questa volta selezionano il
sistema di autovettori e2inx con autovalori λ = 4n2, n ∈ Z. Anche in questo esem-
pio gli autovalori sono reali, gli autovettori mutuamente ortogonali e che gli autovettori,
opportunamente normalizzati, formano un s.o.n.c.: la base di Fourier sul periodo [0, π].
Notiamo che, in questo esempio, ogni autovalore ha molteplicita due (e±2inx sono en-
trambi associati all’autovalore 4n2). Autovettori corrispondenti ad autovalori diversi
sono ortogonali. All’interno di ogni autospazio (di dimensione due) sono stati scelti due
autovettori ortogonali in modo che l’insieme di tutti gli autovettori formi un s.o.n.c..
I problemi di SL piu interessanti sono pero singolari. Un problema puo essere sin-
golare, ad esempio, se p o ω si annullano (o divergono) in a o in b, oppure, ancora piu
semplicemente, se l’intervallo [a, b] non e limitato. Le soluzioni delle equazioni differen-
ziali potrebbero essere discontinue e illimitate agli estremi dell’intervallo. Usualmente,
all’estremo singolare si impongono condizioni quali la limitatezza oppure l’integrabilita
L2 (quest’ultima e la condizione che si impone ad esempio nei problemi provenienti dalla
Meccanica Quantistica).
Esempio 2: polinomi di Legendre. Consideriamo
d
dx
((1− x2)
dy
dx
)+ λy = 0, −1 ≤ x ≤ 1 (51)
e richiediamo alle soluzioni di essere limitate in x = ±1. Abbiamo p = 1−x2, q = 0, ω = 1.
Il problema e singolare perche p(±1) = 0. Gli autovalori sono λl = l(l+1) con autovettori
i polinomi di Legendre Pl(x) che formano, dopo normalizzazione, un s.o.n.c. in L2[−1, 1].
Esempio 3: polinomi di Hermite. Consideriamo
d
dx
(e−x
2 dy
dx
)+ e−x
2
λy = 0, −∞ < x <∞ (52)
e richiediamo che le soluzioni siano L2 all’infinito. L’equazione di Hermite si incontra in
Meccanica Quantistica nello studio dell’oscillatore armonico. La condizione al contorno
che abbiamo imposto e quella naturale in Meccanica Quantistica. p = ω = e−x2, q = 0.
Il problema e singolare perche l’intervallo e infinito. Gli autovalori sono λn = 2n con
autovettori Hn(x) che definiscono un s.o.n.c. in L2(R, e−x2dx). Notiamo che la presenza
di una funzione non banale ω ci dice che gli autovettori del problema di SL sono un
sistema ortonormale in L2(R) col prodotto scalare (f, g)ω o equivalentemente in L2(R)
con misura e−x2dx. L’equazione per i polinomi di Hermite si riconduce all’equazione di
Schroedinger per V (x) = x2/2 con un semplice cambio di variabile u(x) = y(x)e−x2/2.
22

Esempio 4: polinomi di Laguerre. Consideriamo
d
dx
(e−x
dy
dx
)+ e−xλy = 0, 0 < x <∞ (53)
e richiediamo che le soluzioni siano L2 all’infinito. l’equazione di Laguerre si incontra in
Meccanica Quantistica nello studio dell’atomo di idrogeno: x e la coordinata radiale in
coordinate sferiche. Gli autovalori sono λn = n con autovettori Ln(x) che definiscono un
s.o.n.c. in L2((0,∞), e−x2dx).
1.7.3 Equazioni Differenziali alle Derivate Parziali
Consideriamo una classe particolare di operatori alle derivate parziali, gli operatori el-
littici. Un operatore del II ordine
L =D∑
i,j=1
aij(x)∂2
∂xi∂xj+
D∑i=1
bi(x)∂
∂xi+ c(x) (54)
si dice ellittico se la matrice simmetrica corrispondente ai termini con due derivate aij(x)
e definita positiva (o definita negativa). L’equazione di Laplace, l’equazione di Poisson,
l’equazione di Schoedinger stazionaria sono esempi di equazioni ellittiche. Gli operatori
ellittici sono in assoluto i piu semplici, a cominciare dalle proprieta dello spettro,
Teorema 11: lo spettro di un operatore ellittico su uno spazio compatto L2(K) e
puramente discreto.
Esempio 1: armoniche sferiche. Sono le autofunzioni del Laplaciano ristretto alla sfera
S2. Si ottengono in tutta una classe di equazioni della fisica matematica con simmetria
sferica. Dalla separazione delle variabili u(r, θ, φ) = U(r)Y (θ, φ) nell’equazione di Laplace
otteniamo due equazioni per Y = P (cos θ)Φ(φ):
d
dx
((1− x2)
dP
dx
)+ (λ− m2
1− x2)P = 0, −1 ≤ x ≤ 1
Φ′′ + λΦ = 0 (55)
dove x = cos θ e λ, λ sono gli autovalori da determinare. La seconda equazione e im-
mediatamente risolta Φ = eimφ, λ = m2; l’ovvia condizione al contorno da richiedere e
la periodicita in φ ∈ [0, 2π] che richiede che |m| = 0, 1, 2, .... Nella prima equazione,
richiediamo invece alle soluzioni di essere limitate in x = ±1; x = ±1 corrispondono in-
fatti al polo nord e al polo sud della sfera unitaria in cui nulla di speciale deve succedere.
23

Per la prima equazione abbiamo p = 1 − x2, q = m2/(1 − x2), ω = 1. Il problema e
singolare perche p(±1) = 0 e q(±1) = ∞. Gli autovalori sono λl = l(l + 1), |m| ≤ l, l =
0, 1, 2... con autovettori Pml (x), polinomi di Legendre generalizzati. Le armoniche sferiche
Ylm(θ, φ) = Pml (cos θ)eimφ formano, dopo normalizzazione, un s.o.n.c. in L2[S2, dΩ(2)],
dove dΩ(2) = sin θdθdφ e la misura sulla sfera unitaria S2.
Gli operatori ellittici hanno inoltre importanti proprieta di regolarita
Teorema 12 - lemma di Weyl: ogni funzione o distribuzione u(x) che risolva l’equazione
ellittica Lu = f e C∞ nei punti in cui i coefficienti aij(x), bi(x), c(x) e il termine noto
f(x) sono C∞.
Questo teorema si applica ad esempio all’equazione di Laplace e di Schroedinger
stazionaria. Le soluzioni dell’equazione di Laplace sono automaticamente C∞, le soluzioni
dell’equazione di Poisson o dell’equazione di Schoedinger stazionaria sono C∞ nei punti
in cui la densita di carica o il potenziale sono C∞.
Infine, per operatori ellittici, i problemi al contorno formulati su insiemi compatti
soddisfano teoreni di esistenza, unicita e dipendenza continua dai dati iniziali.
2 Appendice: Il complemento ortogonale
Una proprieta importante degli spazi di Hilbert riguarda la possibilita di proiettare un
vettore su un sottospazio.
Teorema A: Dato un sottospazio chiuso V dello spazio di Hilbert H, per ogni vettore
f ∈ H esiste unico un vettore f ∗ ∈ V con la proprieta
‖f − f ∗‖ = minv∈V ‖f − v‖ (56)
Dim: sia d = inf‖f − v‖, v ∈ V . Occorre dimostrare che l’estremo inferiore e in
realta un minimo. Se d = 0, f ∈ V e f ∗ = f . Possiamo quindi supporre che d > 0.
Consideriamo gli insiemi Cn = v ∈ V |‖v−f‖ ≤ d+1/n. Dall’identita 2(‖x‖2 +‖y‖2) =
‖x+ y‖2 + ‖x− y‖2 segue che, se v1, v2 ∈ V ,
2(‖v1 − f‖2 + ‖v2 − f‖2) = ‖v1 + v2 − 2f‖2 + ‖v1 − v2‖2
‖v1 − v2‖2 = 2‖v1 − f‖2 + 2‖v2 − f‖2 − ‖v1 + v2 − 2f‖2 ≤2(d+ 1
n
)+ 2
(d+ 1
n
)− 4d2 ≤ 8 d
n+ 4
n2 (57)
Nel penultimo passaggio si e usato il fatto che, poiche (v1 +v2)/2 ∈ V , ‖f−(v1 +v2)/2‖ ≥d. Scegliendo una successione di vettori vn ∈ Cn avremo che
‖vn − vn+p‖2 ≤ 8d
n+
4
n2(58)
24

tende a zero per n → ∞ per qualunque p, poiche vn, vn+p ∈ Cn. Questo implica che
vn ∈ Cn e di Chauchy e quindi converge. Il limite f ∗ sara contenuto in V poiche V e
chiuso. Da ‖vn− f‖ ≤ d+ 1/n segue che ‖f − f ∗‖ ≤ d. Poiche d e l’estremo inferiore dei
possibili valori ‖f − v‖, ne segue che ‖f − f ∗‖ = d. f ∗ e unico: supponiamo infatti che
esistano due vettori che soddisfino d = ‖f − f1‖ = ‖f − f2‖. Usando una minorazione
analoga a quella della formula (57) otteniamo
‖f1 − f2‖2 = 2‖f1 − f‖2 + 2‖f2 − f‖2 − ‖f1 + f2 − 2f‖2 = 4d2 − ‖f1 + f2 − 2f‖2 ≤4d2 − 4d2 = 0
che e possibile solo per f1 = f2. 2
Osservazione: il teorema e valido nell’ipotesi meno restrittiva che V sia un insieme
convesso chiuso. La chiusura e un’ipotesi necessaria.
Il vettore f ∗ e noto come la miglior approssimazione di f in V . E anche caratterizz-
abile come la proiezione ortogonale di f su V . Vale infatti:
Teorema B: f ∗ e univocamente determinato dalla proprieta (f − f ∗, v) = 0 per tutti i
vettori v ∈ V .
Dim: Se (f − f ∗, v) = 0 per tutti i vettori v ∈ V , vale anche (f − f ∗, f ∗ − v) = 0. Dal
teorema di Pitagora segue che ‖f−v‖2 = ‖f−f ∗‖2+‖f ∗−v‖2 e quindi ‖f−f ∗‖2 ≤ ‖f−v‖2
per ogni v ∈ V . Ne segue che f ∗ e la miglior approssimazione di f in V . Viceversa, sia
f ∗ la miglior approssimazione. Prendiamo v = f ∗ + αw con w ∈ V, α ∈ C. Abbiamo che
‖f − f ∗‖2 ≤ ‖f − v‖2 = ‖f − f ∗ − αw‖2 =
‖f − f ∗‖2 + ‖α|2‖w‖2 − α(w, f − f ∗)− α∗(w, f − f ∗)∗
da cui α(w, f − f ∗) + α∗(w, f − f ∗)∗ ≤ |α|2‖w‖2. Prendendo α = |α|eiθ con |α| → 0 si
ottiene eiθ(w, f − f ∗) + e−iθ(w, f − f ∗)∗ ≤ 0. Prendendo θ = 0, π/2, π, 3π/2 si ottiene
Re, Im(w, f − f ∗) ≥ 0 e contemporaneamente Re, Im(w, f − f ∗) ≤ 0, da cui si conclude
(f − f ∗, w) = 0. 2
Dato un insieme S definiamo il suo complemento ortogonale come l’insieme
S⊥ = f ∈ H|(f, s) = 0, s ∈ S (59)
S⊥ e sempre un sottospazio chiuso di H. Infatti da x, y ∈ S⊥ segue che (αx+ βy, s) = 0
per ogni s ∈ S per la linearita del prodotto scalare, e da xn ∈ S → x segue che (x, s) =
lim(xn, s) = 0 per la continuita del prodotto scalare.
25

Teorema C: Dato un sottospazio chiuso V di H, ogni f ∈ H si scrive in maniera unica
come f = x+ y con x ∈ V, y ∈ V ⊥. In simboli
H = V ⊕ V ⊥ (60)
Dim: x e definito come la proiezione f ∗ di f su V e y come f − f ∗. y ∈ V ⊥ per il
Teorema B. L’unicita della decomposizione segue dal fatto che, se f = x + y = x′ + y′,
x− x′ = y − y′ uguaglia vettori in V e V ⊥ che hanno in comune il solo vettore zero. Ne
segue x = x′ e y = y′. 2
Osservazione: Se V e un sottospazio non chiuso il Teorema C si puo riformulare come
H = V ⊕ V ⊥. Vale anche S⊥⊥ = S. Quest’ultimo risultato segue dalla doppia appli-
cazione del risultato precedente, una volta a V = S e l’altra a V = S⊥: H = S ⊕ S⊥ =
S⊥ ⊕ S⊥⊥. Eliminando il fattore comune S⊥ si ottiene il risultato voluto.
References
[1] Dispense per Metodi Matematici della Fisica, http://castore.mib.infn.it/.zaffaron/
[2] Reed e Simon, Methods of Modern Mathematical Physics, Academic Press, Quattro
Volumi.
[3] Mikusinski, Introduction to Hilbert Spaces, Academic Press.
[4] W. Rudin, Functional Analysis, MacGraw-Hill.
26














![L’inventario fonologico delle lingue - unive.it · Quindi il fonema /n/ avrà tre diverse manifestazioni fonetiche negli allofoni [M] (davanti a fricative labiodentali), [η] (davanti](https://static.fdocument.org/doc/165x107/5ae6a5ee7f8b9a9e5d8df789/linventario-fonologico-delle-lingue-univeit-il-fonema-n-avr-tre-diverse.jpg)



