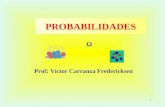
1) Magnetic total field (T) obtained from airborne survey (see R.J.Blakely, 1995) (ΔT) Total field...
23
netic total field (T) obtained from airborne survey (see R.J.Blakely (ΔT) Total field anomaly (IGRF removal), which satisfy potential theory, only when Theory z k y j x i R dv r , 1 M F ˆ C ΔF F ˆ ΔT m ( IGRF) 1. Understanding magnetic total field 2) General form of total field anomaly due to causative body (R) Where C m is mag constant; is a unit vector in direction of the regional field; is vector of magnetisation; r is distance between observation and M F ˆ (E0) Measured total field data (amplitude)
-
Upload
sabrina-lambert -
Category
Documents
-
view
224 -
download
0
Transcript of 1) Magnetic total field (T) obtained from airborne survey (see R.J.Blakely, 1995) (ΔT) Total field...

1) Magnetic total field (T) obtained from airborne survey (see R.J.Blakely, 1995)
(ΔT) Total field anomaly (IGRF removal), which satisfy potential theory,
only when
Theory
zk
yj
xi
R
dvr
,
1MF̂CΔFF̂ΔT m
( IGRF)
1. Understanding magnetic total field
2) General form of total field anomaly due to causative body (R)
Where Cm is mag constant; is a unit vector in direction of the regional field; is
vector of magnetisation; r is distance between observation and integral element.
M
F̂
(E0)
Measured total fielddata (amplitude)

2 magnetic total field measurement device— (horizontal) triangle frame on airplane
M1 M2
M3
15.73 m
11.8
8 m
x (E)
y (N)
)M()M()M(
0
88.11
0
0
0
7.865
0
0
7.865
]MMM[
321
321
0
Sensor location:
(E1a)
Case 1: triangle frame with reference to the geographic north

Case 2: triangle frame wrt the survey line direction
)M()M()M(
0
88.11
0
0
0
7.865
0
0
7.865
100
0)cos()sin(
0)sin()cos(
]MMM[
321
321
2. Triangle measurement device (continued)
M1
M2M3
15.73 m
11.88 m
Sensor location:
x (E)
y (N)
Survey l
ine directi
on
φ
(E1b)

3. Four steps of rotation from the NED frame to the triangle frame
(1/4) rotation around E-Axis with Pitch = 10o
)cos()sin(0
)sin()cos(0
001
R E
pp
pp (E2a)

3. Four steps of rotation (continued): (2/4) rotation around N-Axis with Roll = 10o
)cos(0)sin(
010
)sin(0)cos(
R N
rr
rr(E2b)

3. Four steps of rotation (continued):(3/4) rotation around D-Axis with Yaw = 10o
100
0)cos()sin(
0)sin()cos(
R E yy
yy(E2c)

Combination of the above three rotations about axis in sequence of D-N-E
DNEEND RRRR
100
0)cos()sin(
0)sin()cos(
)cos(0)sin(
010
)sin(0)cos(
)cos()sin(0
)sin()cos(0
001
yy
yy
rr
rr
pp
pp
Orthogonal rotation from NED (cyan) to pink frame by REND
(E3)

Three sensor locations before and after rotation—for the model forward calculation
)m()m()m(
0
88.11
0
0
0
7.865
0
0
7.865
R mmm
321
END321
Case 1: NED frame – flight heading with reference to the geographic north
Case 2: Survey line frame – flight heading wrt the survey line direction
)m()m()m(
0
88.11
0
0
0
7.865
0
0
7.865
100
0)cos()sin(
0)sin()cos(
R mmm
321
DNE321
Where φ is azimuth angle of the survey line;
in RDNE angle YAW is amended by subtracting φ
Their three ground positions defined by
321 mmm},,{
obsobsobs zyx
(E4a)
(E4b)

3. Four steps of rotation (continued)(4/4) rotation from airplane (NED’) frame to triangle (T) frame
0)sin()cos(
0)sin()cos(
001
R
31
32
12
T
v
v
v
M1 M2
M3
15.73 m
11.8
8 m
X (E)
Y (N)
0
V12 (TE’)
V32V31
Directional gradients:
V12 = (M2 - M1) / d12
V32 = (M2 - M3) / d32
V31 = (M1 - M3) / d31
Where θ = atan(2 d30 / d12)
θ
Magnetometer triangle device based on the rotated airplane
Gradients defined in triangle frame i.e. airplane board plane
0
D
N
E
T
T
T
0)sin()cos(
0)sin()cos(
001
V
V
V
31
32
12
(TN’)
θ
(E5a) or (E5b)

4. Method regarding relationship of directional derivatives (gradients) in XYZ (or NED) frame
and the rotated airplane triangle frame
Part 4 is to generate rotation of a point location in two different
co-ordinate systems and rotation of directional derivatives
represented in different co-ordinate systems
Theory

4. Directional derivatives: definition
Directional derivatives in 3D Cartesian coordinate system
vrfh
rfvhrfrfh
)()()(
lim)(
0
Where vector r = [ x y z] representing an observation station and v is a unit vector of directional cosines with three angles, α, β and γ, between the unit vector and x, y and z axis respectively,
(E6a)
cos
cos
cos
v
z
rf
y
rf
x
rfrf
)()()()(
(E6b)
(E6c)x
y
zv
α
β

4. Directional derivatives: general formBased on E6, three wanted directional derivatives can be created
3
3
3
3
2
2
2
2
1
1
1
1
cos
cos
cos)()()()(
cos
cos
cos)()()()(
cos
cos
cos)()()()(
z
rf
y
rf
x
rfrf
z
rf
y
rf
x
rfrf
z
rf
y
rf
x
rfrf
)()()(
cos
cos
cos
cos
cos
cos
cos
cos
cos)()()(
321
3
3
3
2
2
2
1
1
1
321
zyx fffrfrfrf
(E7b)
(E7a)
(E7a) can be written in matrix form,
Note that (E7b) can be applied in both orthogonal and none-orthogonal rotation cases.

4. Directional derivatives: levelled triangle frame
;
0
)sin(
)cos(
;
0
)sin(
)cos(
;
0
0
1
313322121
With (E7b) and the triangle directions (V12, V32m V31) defined in (E5), let
Again, three column vectors, , represents the triangle sensors gradient
directions, M1-to-M2, M3-to-M2 and M3-to-M1, respectively.
)()()(
0
)sin(
)cos(
0
)sin(
)cos(
0
0
1)()()(
313212
313212
zyx fffrfrfrf
(E8b)
313212
(E8a)
0
)sin(
)cos(
0
)sin(
)cos(
0
0
1
100
0)cos()sin(
0)sin()cos()()()(
313212
zyx fffrfrfrf
Case 1: NED frame – flight heading with reference to the geographic north
Case 2: Survey line frame – flight heading wrt the survey line direction
Where φ is azimuth angle of the survey line (E8c)

4. Directional derivatives: rotated triangle frameDirection of the derivatives in (E8b) can be rotated from the levelled into the (rotated)
flying airplane frame based on rotation form defined in (E3)
)()()(
0
)sin(
)cos(
0
)sin(
)cos(
0
0
1
R)()()(
313212
END313212
zyx fff
rfrfrf
(E9a)
313212 313212
z
rfy
rfx
rf
rf
rf
rf
)(
)(
)(
R
0
0
0
)sin(
)sin(
0
)cos(
)cos(
1
)(
)(
)(
)(
)(
)(
TEND
31
32
12
31
32
12
(E9a) can be written in the transposed form,
(E9b)
(E9b) is a final result representing relationship of directional derivatives between XYZ
(or NED) frame and the rotated airplane triangle frame, in which the left hand elements
are measured data and the right hand derivatives are to be estimated.
(RT)

Summary 1: Rotations of gradients from NED frame to the airplane triangle frame
Orthogonal rotation from NED (cyan) to pink frame by REND
)sin()cos()sin()sin()cos()sin()cos()sin()sin()sin()cos()cos(
)sin()cos()sin()sin()sin()cos()cos()sin()cos()sin()sin()cos(
)sin()sin()cos()cos()cos(
rpyrppyypryp
pryrpypyprpy
ryryr
0)sin()cos(
0)sin()cos(
001
Rot = RT • RTEND =
None-orthogonal rotation from thepink to the triangle frame by RT
(E10)REND is also refers to
directional cosine matrix
converted with roll, pitch
and yaw. The result has
been verified completely
same as that from Matlab
“aerospace toolbox”.

Summary 2: Relationship between measuring gradients and wanted gradients
D
N
E
T
T
TTENDT
31
32
12
RR
V
V
V
D
T
S
T
T
TTSTDT
31
32
12
RRR
V
V
V
Where RSTD is for rotation from orthogonal survey frame to variation airplane frame
in which angle YAW is adjusted by subtracting an angle of the survey line direction
(E11b)
(E11a)
Case 1: NED frame – flight heading with reference to the geographic north
Case 2: Survey line frame – flight heading wrt the survey line direction
100
0)cos()sin(
0)sin()cos(
R
φ is azimuth angle of the survey line

5. Solution to Equation 11 — Understanding features of E11a
• REND is a directional cosine matrix of rotating NED to airplane frame which is defined by flight attitude (roll, pitch, yaw) at each observation point. It is orthogonal matrix and thus satisfying,
REND = REND’ and REND = REND-1
• RT is an fixed element matrix subject to the triangle device with trace of 2 (rather than 3).
• Due to the none orthogonal and trace number of RT, inverse of (RT· RSTD ) is normally close to singular and hence results in badly solution to (Te,Tn,Td). It also suggests that solution to TE and TN can only be contained excepted TD.
Rewriting (E11a),
D
N
E
T
T
TTENDT
31
32
12
RR
V
V
V

5. Solution to E11a via estimation approach
Method I: by Singular Value Decomposition (SVD) method, e.g.
Let A = (RT· RTDST ) A = U·S·V’
A-1 = V· S-1·U’ (reducing trace)
31
32
121
V
V
V
A
D
N
E
T
T
T
No solution to Td due to
reducing matrix trace

5. Solution to E11a via estimation approachMethod II: Based on (E11a) of orthogonal rotation between
survey frame and airplane frame
D
N
E
D
N
E
T
T
T
T
T
TTENDR
airplane
frame
NED
frame
D
N
E
D
N
E
T
T
T
T
T
T
ENDR
airplane
frame
NED
frame
31
32
12
'31
'32
'12
ENDR
V
V
V
V
V
V
airplane
frame
NED
frame
(E5b)
D
N
E
T
T
T
0)sin()cos(
0)sin()cos(
001
V
V
V
31
32
12
survey frame
)sin()cos(VV
)sin()cos(VV
V
1231
1232
12
N
N
E
T
T
Tsolving
equation
approximate
orthogonal
vectors to
triangle’s

6. Estimation to TD
Method 1: Grid transformationTD may be estimated in different ways and with the TE and TN obtained from the
above steps, which can be categorized into three methods.
Method 1: By means of (grid data) FFT transformation of the two derivative components, TE and TN , into TD ,
iv
WvuT
iu
WvuTvuvuT N
NE
ED ),(),(),( 22
Where u and v are FFT domain wavenumbers; WE and WN are weights generated due to TE and TN noise levels, defaults are 0.5 representing equally weighting.
To reduce transforming artifacts from the wavenumber (u ,v) simultaneously closing to zero, the above form may be modified by adding total field (T) term,
0),(),(),(
0),(),(),(
2222
2222
KvuWvuTiv
WvuT
iu
WvuTvu
Kvuiv
WvuT
iu
WvuTvu
vuT
TN
NE
E
NN
EE
D
Where K0 is wavenumber criteria; weights generated with satisfying, WE + WN + WT = 1,
and normally setting WT >> { WE , WN } when (u ,v) → 0.
(E12a)
(E12b)

6. Estimation to TD (continued)
Method 2: Solving the quadratic equation
Where is an unit vector of directional cosine of Earth magnetic field, defined by
local Earth mag (RGRF) declination (D) and inclination (I).
n
22
),,(),,(
nzyxTn
zyxT
D
N
E
DNE
n
n
n
TTTnzyxTn
zyxT][),,(
),,(
Method 2: Based on the triangle device (i.e. based-point) and E6a, total filed
gradient in Earth magnetic filed direction (total gradient) can be written as
2222DDNNEEDNE nTnTnTTTT let
)sin();cos()cos();sin()cos( InDInDIn DNE
After solving the quadratic equation for TD, we have
2
222222
1
)1(2)1()(
D
NNDNENEEEDNNEEDD n
TnnTTnnTnnTnTnnT
(E13a)
(E13b)

6. Estimation to TD (continued)Method 3: Solving Laplacian equation
)(
)sin(
)cos()cos(
)sin()cos(
b
Iy
TUzy
y
Tz
DIy
TUyy
y
Ty
DIy
TUxy
y
Tx
)sin(
)cos()cos(
)sin()cos(
ITTz
DITTy
DITTx
Method 3: With the above definition, total filed can be divided into three components,
(E14b)
TzT
yx
z
I
DTyTx
Applying partial derivatives to (E14a) wrt x, y and z gives three groups of results,
(E14a)
)(
)sin(
)cos()cos(
)sin()cos(
a
Ix
TUzx
x
Tz
DIx
TUyx
x
Ty
DIx
TUxx
x
Tx
)(
)sin(
)cos()cos(
)sin()cos(
c
Iz
TUzz
z
Tz
DIz
TUyz
z
Ty
DIz
TUxz
z
Tx
Wanted TD
)sin(
)cos()cos()sin(
;0)sin()cos()cos()sin()cos(;0
I
ID
y
TD
x
T
z
TT
Iz
TDI
y
TDI
x
TUzzUyyUxx
D

Conclusion
1) Starting from initial definition of mag total field intensity (TFI, in E0), forward calculation due to the sensors in airplane triangle locations is created with employing airplane attitude information (E4a-b). It constructs a valid comparison between true and estimated gradients created in three frames, NED, levelled triangle and airplane triangle.
2) Formula have been established based on the triangle device and the attitude information, leading to a final form in (E9b) that represents the forward rotation of XYZ gradients from NED frame to the airplane triangle frame. It is a foundation of the study.
3) Due to less information obtained about TFI vertical variation, which results in inversion of the rotation matrix being singular, the inversed rotation, from the triangle gradients to the NED gradients, has to be sorted off by estimation, shown in part 5 of slides.