1 ANÁLISE DE SECÇÕES - civil.ist.utl.ptluis/cae/seccoes.pdf · 1 1 ANÁLISE DE SECÇÕES 1.1...
31
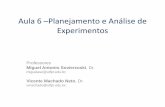
1 1 ANÁLISE DE SECÇÕES 1.1 Estados de tensão e de deformação Admita-se que o eixo de uma peça prismática coincide com o eixo z do referencial ortonormado (x,y,z), como representado na figura 1. x z y Figura 1 - Sistema de eixos de referência para uma peça prismática Seja σ o vector em que se reúnem as componentes do tensor das tensões e ε o vector em que se listam as correspondentes componentes do tensor das deformações: σ σ σ σ σ σ = xy xz yz z y x σ γ γ γ ε ε ε = xy xz yz z y x ε No caso das peças prismáticas é usual admitir que: 0 0; 0; xy y x ≈ σ ≈ σ ≈ σ Dependendo da geometria da peça e do carregamento a que está sujeita, outras componentes de tensão poderão ser consideradas nulas. Exemplo: no caso da flexão no plano (y,z): σ σ = yz z σ ou { } z σ = σ ;
Transcript of 1 ANÁLISE DE SECÇÕES - civil.ist.utl.ptluis/cae/seccoes.pdf · 1 1 ANÁLISE DE SECÇÕES 1.1...
1
1 ANÁLISE DE SECÇÕES
1.1 Estados de tensão e de deformação
Admita-se que o eixo de uma peça prismática coincide com o eixo z do referencial
ortonormado (x,y,z), como representado na figura 1.
xz
y
Figura 1 - Sistema de eixos de referência para uma peça prismática
Seja σ o vector em que se reúnem as componentes do tensor das tensões e ε o vector em que
se listam as correspondentes componentes do tensor das deformações:
σσσσσσ
=
xy
xz
yzz
y
x
σ
γγγεεε
=
xy
xz
yzz
y
x
ε
No caso das peças prismáticas é usual admitir que:
0 0;0; xyyx ≈σ≈σ≈σ
Dependendo da geometria da peça e do carregamento a que está sujeita, outras componentes
de tensão poderão ser consideradas nulas.
Exemplo: no caso da flexão no plano (y,z):
σσ
=yzzσ ou zσ=σ ;
Análise de Secções
2
γε
=yzzε ou zε=ε .
1.2 Relações constitutivas
Admite-se que o material estrutural tem um comportamento elástico linear, tomando a relação
tensões-extensões a seguinte expressão:
εσ k= (1)
em que a matriz k é a matriz em que se reúnem os coeficientes elásticos. A matriz de rigidez
k é simétrica e positiva-definida.
Exemplo: no caso da flexão plana (y,z),
=
GEk
1.3 Aproximação das deformações
Para geometrias e carregamentos gerais, não se conhecem soluções exactas para os estados de
tensão e de deformação. Torna-se necessário aproximar um desses campos, ficando o outro
automaticamente determinado pelas relações constitutivas.
Na teoria das peças prismáticas é usual aproximar o campo de deformações. Suponha-se que,
numa secção de abcissa z, se aproximam as deformações pela fórmula,
eE=ε , (2)
em que E é a matriz em que se reúnem as funções de aproximação, estando os pesos
correspondentes reunidos no vector e.
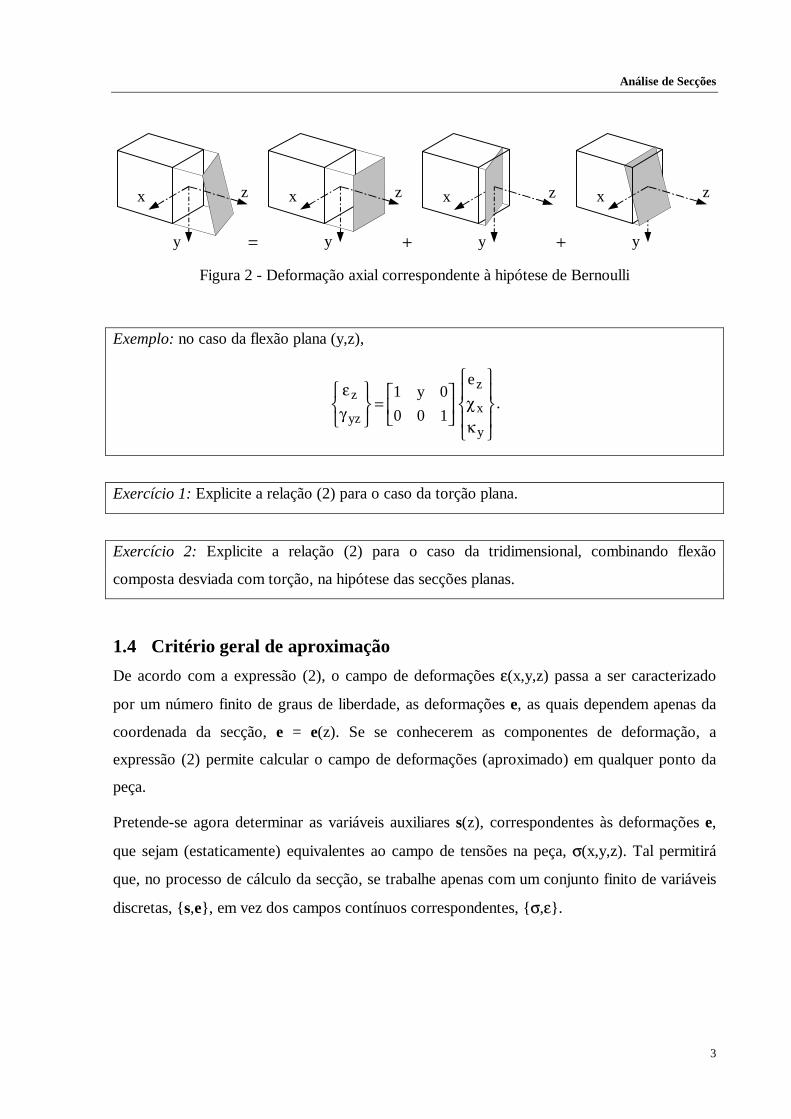
Uma hipótese usual é a de se admitir que secções planas se mantêm planas após deformação,
hipótese de Bernoulli (figura 2). Neste caso tem-se:
)z(ee = ;
yx1)y,x(E = .
Análise de Secções
3
x z
y
x z
y
x z
y
x z
y= + +
Figura 2 - Deformação axial correspondente à hipótese de Bernoulli
Exemplo: no caso da flexão plana (y,z),
κχ
=
γε
y
x
z
yz
ze
100
0y1.
Exercício 1: Explicite a relação (2) para o caso da torção plana.
Exercício 2: Explicite a relação (2) para o caso da tridimensional, combinando flexão
composta desviada com torção, na hipótese das secções planas.
1.4 Critério geral de aproximação
De acordo com a expressão (2), o campo de deformações ε(x,y,z) passa a ser caracterizado
por um número finito de graus de liberdade, as deformações e, as quais dependem apenas da
coordenada da secção, e = e(z). Se se conhecerem as componentes de deformação, a
expressão (2) permite calcular o campo de deformações (aproximado) em qualquer ponto da
peça.
Pretende-se agora determinar as variáveis auxiliares s(z), correspondentes às deformações e,
que sejam (estaticamente) equivalentes ao campo de tensões na peça, σ(x,y,z). Tal permitirá
que, no processo de cálculo da secção, se trabalhe apenas com um conjunto finito de variáveis
discretas, s,e, em vez dos campos contínuos correspondentes, σ,ε.
Análise de Secções
4
A identificação das variáveis s(z) é feita obrigando as variáveis discretas a dissipar a mesma
energia que os campos contínuos que representam:
∫ Ω= d)z,y,x()z,y,x()z()z( tt σεse .
Substituindo nesta condição a hipótese (2) para o campo de deformações, encontra-se a
seguinte definição,
∫ Ω= d)z,y,x()y,x()z( t σüs , (3)
a qual demonstra que o vector s reúne resultantes de tensões (esforços) na secção de abcissa z.
Exemplo: no caso da flexão plana (y,z),
∫ Ω
σσ
=
d100y01
VMN
yz
z
yx .
Exercício 3: Explicite a relação (3) para o caso da torção plana.
Exercício 4: Explicite a relação (3) para o caso da tridimensional, combinando flexão
composta desviada com torção, na hipótese das secções planas.
Exercício 5: Altere as expressões encontradas no Exercício 3 para representar torção com
empenamento. Interprete os esforços encontrados.
1.5 Relações esforços-deformações
Para obter a expressão que relaciona os esforços, s, com as deformações, e, basta substituir na
definição (3) a relação de elasticidade (1), eliminando em seguida o campo de deformações
pela aproximação (2), ficando,
eKs = , (4)

Análise de Secções
5
em que K representa a matriz de rigidez da secção:
∫ Ω= dtüküK . (5)
Exemplo: no caso da flexão plana (y,z),
∫ Ω
= d
G000EyyE
0yEE2K .
Para o caso de uma secção rectangular (b,h), homogénea, em que os eixos x e y sejam eixos
baricêntricos, encontra-se:
12
bhI,bhAcom
GA000EI000EA 3
==
=K .
Exercício 6: Determine a matriz de rigidez para uma secção rectangular (b,h), homogénea,
sujeita à acção conjunta de flexão composta desviada com torção, na hipótese das secções
planas.
1.6 Discretização da secção
Quando a geometria de uma secção é irregular ou quando é composta por diferentes materiais
estruturais, a integração presente na definição (5) pode não ter solução analítica.
Nestas situações, é usual discretizar a secção em elementos homogéneos , de geometria
regular que permita a integração analítica da matriz de rigidez de cada elemento.
Para cada um dos n elementos em que é discretizada a secção, as relações (4,5) mantêm-se
válidas:
;n,...2,1j,jjj == eKs (7)
∫ Ω= djjtjj üküK . (8)
Análise de Secções
6
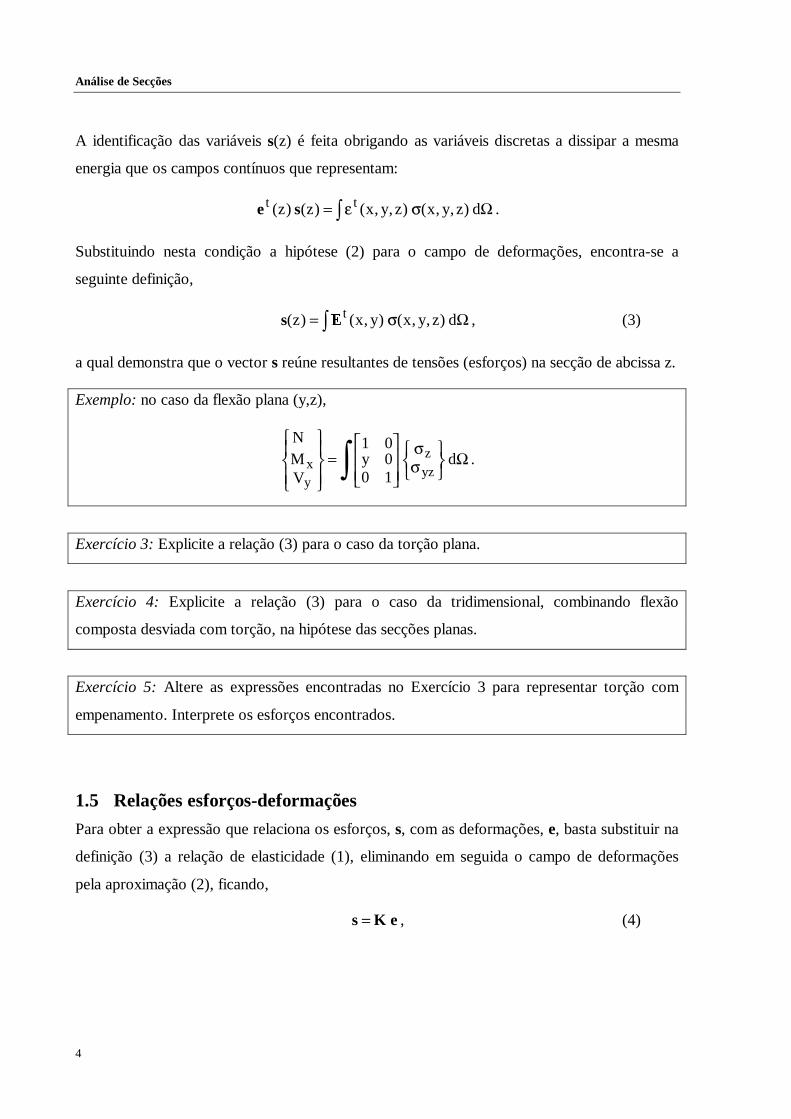
Para garantir a continuidade da secção, é agora necessário estabelecer uma relação entre as
componentes de deformação de cada elemento com as componentes de deformação da secção:
eJe jj = . (9)
Exemplo: no caso da flexão plana (y,z),
κχ
=
κχ
y
x
zj
yj
xj
zj e
100
010
0y1e
.
x
y
zexχ
1
2
1
2
x′y′
1ze1xχ
x ′′2ze
2xχ
x1x χ=χ x2x χ=χ
1G
2GG
y ′′
x1z1z yee χ+= x2z2z yee χ+=
1y
2y
Figura 3 - Relação entre as deformações da secção e as deformações dos elementos.
A cada elemento está agora associado um conjunto de esforços, js , que se torna necessário
relacionar com os esforços na secção, s.
O critério que se adopta para determinar essa relação é análogo ao anteriormente descrito: as
variáveis (s,e) devem dissipar a mesma energia que os campos elementares que representam:
∑=
=n
1jj
tj
t sese .
Substituindo nesta condição a hipótese (9) para o campo de deformações, encontra-se a
seguinte definição:
∑=
=n
1jj
tj sJs . (10)
Análise de Secções
7
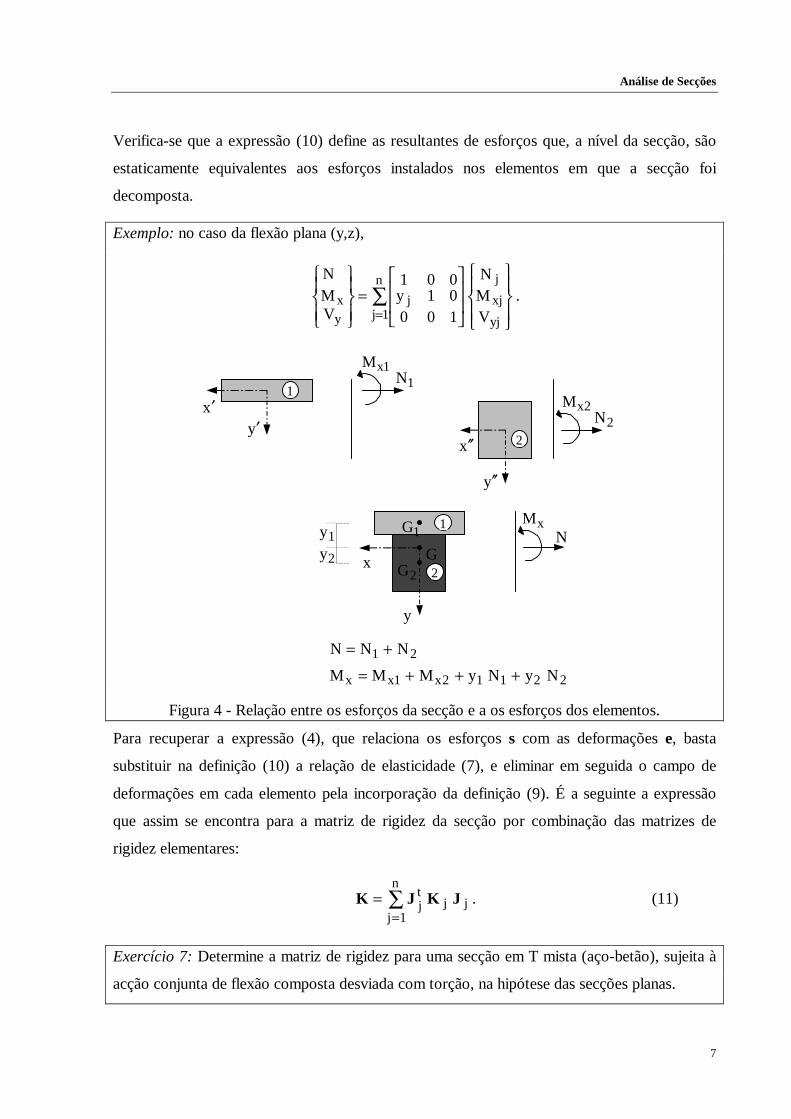
Verifica-se que a expressão (10) define as resultantes de esforços que, a nível da secção, são
estaticamente equivalentes aos esforços instalados nos elementos em que a secção foi
decomposta.
Exemplo: no caso da flexão plana (y,z),
∑=
=
n
1j yj
xj
j
j
y
xVMN
10001y001
VMN
.
x
y
1
2
1
2
x′y′
1xM1N
x ′′
21 NNN +=
1G
2GG
y ′′
22112x1xx NyNyMMM +++=
1y
2y
2xM2N
xMN
Figura 4 - Relação entre os esforços da secção e a os esforços dos elementos.
Para recuperar a expressão (4), que relaciona os esforços s com as deformações e, basta
substituir na definição (10) a relação de elasticidade (7), e eliminar em seguida o campo de
deformações em cada elemento pela incorporação da definição (9). É a seguinte a expressão
que assim se encontra para a matriz de rigidez da secção por combinação das matrizes de
rigidez elementares:
∑=
=n
1jjj
tj JKJK . (11)
Exercício 7: Determine a matriz de rigidez para uma secção em T mista (aço-betão), sujeita à
acção conjunta de flexão composta desviada com torção, na hipótese das secções planas.
Análise de Secções
8
1.7 Problemas fundamentais
Dois tipos de problemas podem ser postos ao analisar o comportamento de uma secção:
− Problema directo: dado um campo de deformações, calcular os esforços instalados na
secção;
− Problema indirecto: dado um campo de esforços, determinar as deformações instaladas
na secção.
A resolução do problema directo pode ser resumida nos seguintes passos:
Problema Directo: calcular s, sabendo e.
1. Definir o vector das deformações, e;
2. Definir a lei de aproximação do campo de deformações;
3. Discretizar a secção, e caracterizar as propriedades geométricas e mecânicas de cada elemento;
4. Inicializar o vector dos esforços, s=0;
5. Determinar o campo de deformações ε, recorrendo à aproximação (2);
6. Para cada elemento:
a) Determinar o campo de tensões σj, recorrendo às relações de elasticidade (1);
b) Determinar os esforços sj, recorrendo à definição (3);
c) Atribuir ao vector dos esforços s a participação do elemento, recorrendo à definição (10).
Exercício 8: Estabeleça um procedimento alternativo para o problema directo, baseado na
utilização das matrizes de rigidez elementares.
Para a resolução do problema indirecto pode-se recorrer ao seguinte procedimento:
Problema Indirecto: sabendo s, calcular e.
1. Definir o vector dos esforços, s;
2. Definir a lei de aproximação do campo de deformações;
Análise de Secções
9
3. Discretizar a secção, e caracterizar as propriedades geométricas e mecânicas de cada elemento;
4. Inicializar a matriz de rigidez da secção, K=0;
5. Para cada elemento:
a) Definir a matriz de compatibilidade das deformações, Jj,;
b) Calcular a matriz de rigidez elementar Kj, recorrendo à definição (8);
c) Atribuir à matriz de rigidez da secção a contribuição do elemento, recorrendo à expressão
(11);
6. Resolver o sistema (4).
Pode ainda considerar-se o problema misto, em que numa secção é dado um conjunto de
esforços e de deformações não correspondentes, pretendendo-se determinar as restantes
componentes de deformação e de esforço. É imediata a adaptação dos procedimentos acima
descritos para a resolução de problemas mistos.
1.8 Secções de betão armado: comportamento linear
Se se admitir um comportamento elástico linear, tanto à tracção como à compressão, do aço e
do betão, os resultados acima obtidos são directamente aplicáveis à análise de secções de
betão armado.
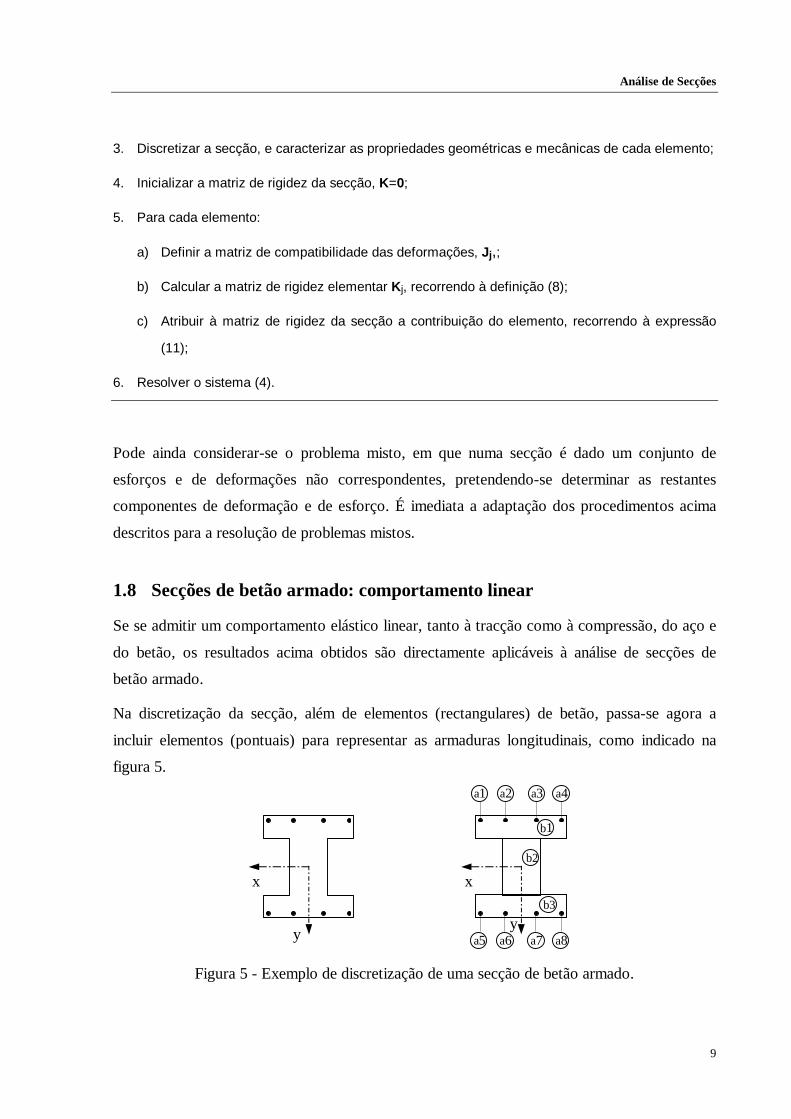
Na discretização da secção, além de elementos (rectangulares) de betão, passa-se agora a
incluir elementos (pontuais) para representar as armaduras longitudinais, como indicado na
figura 5.
b1
b2
x
y
x
y
b3
a1 a2 a3 a4
a5 a6 a7 a8
Figura 5 - Exemplo de discretização de uma secção de betão armado.
Análise de Secções
10
É corrente considerar apenas a contribuição das armaduras longitudinais para o modo de
deformação axial. Assim, o vector que caracteriza o estado de deformação em cada elemento
de aço, je , tem apenas uma componente, a deformação axial.
Exemplo: no caso da flexão plana (y,z),
[ ]
χ
=x
zjj
ey1e .
Exercício 9: Generalize o resultado anterior para a acção conjunta de flexão composta
desviada com torção, na hipótese das secções planas.
1.9 Integração numérica
Em algumas situações pode deixar de ser possível, ou ser desvantajoso do ponto de vista de
processamento numérico, procurar soluções analíticas para a matriz de rigidez elementar (8);
nessas situações recorre-se a algoritmos de integração numérica.
Tal sucede quando a geometria do elemento é irregular ou descrita por funções não lineares,
quando o material estrutural tem um comportamento não linear e ainda quando se pretende
simular o empenamento da secção.
Existem diversas regras de integração numérica, as quais são desenvolvidas atendendo ao tipo
da função integranda, f(t).
Em qualquer dos casos, o integral é aproximado por um produto interno entre dois vectores,
reunindo-se num os pesos de integração e no outro os valores da função em determinados
pontos de amostragem da função:
∫ ∑−
≈=1
1ii )t(fAdt)t(fI . (12)
Na integração de Gauss, os pesos de integração são calculados admitindo que a função a
integrar é polinomial, quando se recorre a n pontos de amostragem, a quadratura de Gauss
integra exactamente polinómios de ordem igual ou inferior a (2n-1).
Na Tabela 1 resumem-se os pesos e os pontos de Gauss, desde dois até cinco pontos.

Análise de Secções
11
Tabela 1: Quadratura de Gauss
n ti AI
2 ± 0.5773502691 1.0000000000
3 ± 0.7745966692 0.5555555555
0.000000000 0.8888888888
4 ± 0.8611363115 0.3478548451
± 0.3399810435 0.6521451548
5 ± 0.9061798459 0.2369268850
± 0.5384693101 0.4786286704
0.000000000 0.5688888888
A aplicação repetida do resultado (12) permite a generalização imediata para a fórmula de
integração sobre um domínio rectangular:
∑∑∫ ∫ ≈=− − i j
jiji
1
1
1
1
)t,s(fAAdtds)t,s(fI . (13)
Para recorrer a estes resultados na análise de secções, realiza-se uma mudança de coordenadas
de modo a exprimir a definição (8) para a matriz de rigidez na forma (13),
∫ ∫∫−
=Ω=1
1
1
1-jj
tjjj
tjj dtdsJd üküüküK ,
em que J representa o determinante do Jacobiano da transformação de coordenadas. Se o
domínio for rectangular, esse determinante coincide com um quarto da área do domínio.
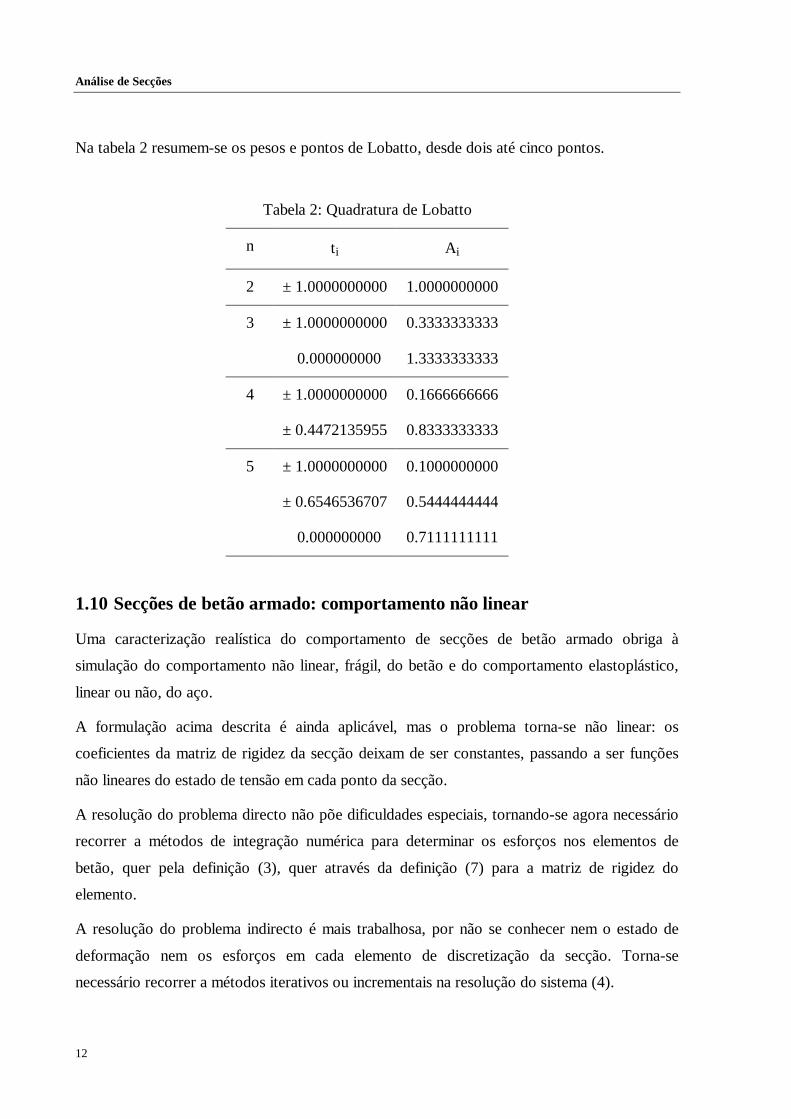
A quadratura de Lobatto é análoga à de Gauss, sendo modificada de modo a controlar sempre
os pontos extremos do intervalo de integração, o que, no caso da análise de secções, permite a
verificação directa dos valores limites das extensões e das tensões. A quadratura de Lobatto
integra exactamente polinómios de ordem igual ou inferior a (2n-3) quando se recorre a n
pontos de amostragem.
Análise de Secções
12
Na tabela 2 resumem-se os pesos e pontos de Lobatto, desde dois até cinco pontos.
Tabela 2: Quadratura de Lobatto
n ti Ai
2 ± 1.0000000000 1.0000000000
3 ± 1.0000000000 0.3333333333
0.000000000 1.3333333333
4 ± 1.0000000000 0.1666666666
± 0.4472135955 0.8333333333
5 ± 1.0000000000 0.1000000000
± 0.6546536707 0.5444444444
0.000000000 0.7111111111
1.10 Secções de betão armado: comportamento não linear
Uma caracterização realística do comportamento de secções de betão armado obriga à
simulação do comportamento não linear, frágil, do betão e do comportamento elastoplástico,
linear ou não, do aço.
A formulação acima descrita é ainda aplicável, mas o problema torna-se não linear: os
coeficientes da matriz de rigidez da secção deixam de ser constantes, passando a ser funções
não lineares do estado de tensão em cada ponto da secção.
A resolução do problema directo não põe dificuldades especiais, tornando-se agora necessário
recorrer a métodos de integração numérica para determinar os esforços nos elementos de
betão, quer pela definição (3), quer através da definição (7) para a matriz de rigidez do
elemento.
A resolução do problema indirecto é mais trabalhosa, por não se conhecer nem o estado de
deformação nem os esforços em cada elemento de discretização da secção. Torna-se
necessário recorrer a métodos iterativos ou incrementais na resolução do sistema (4).
Análise de Secções
13
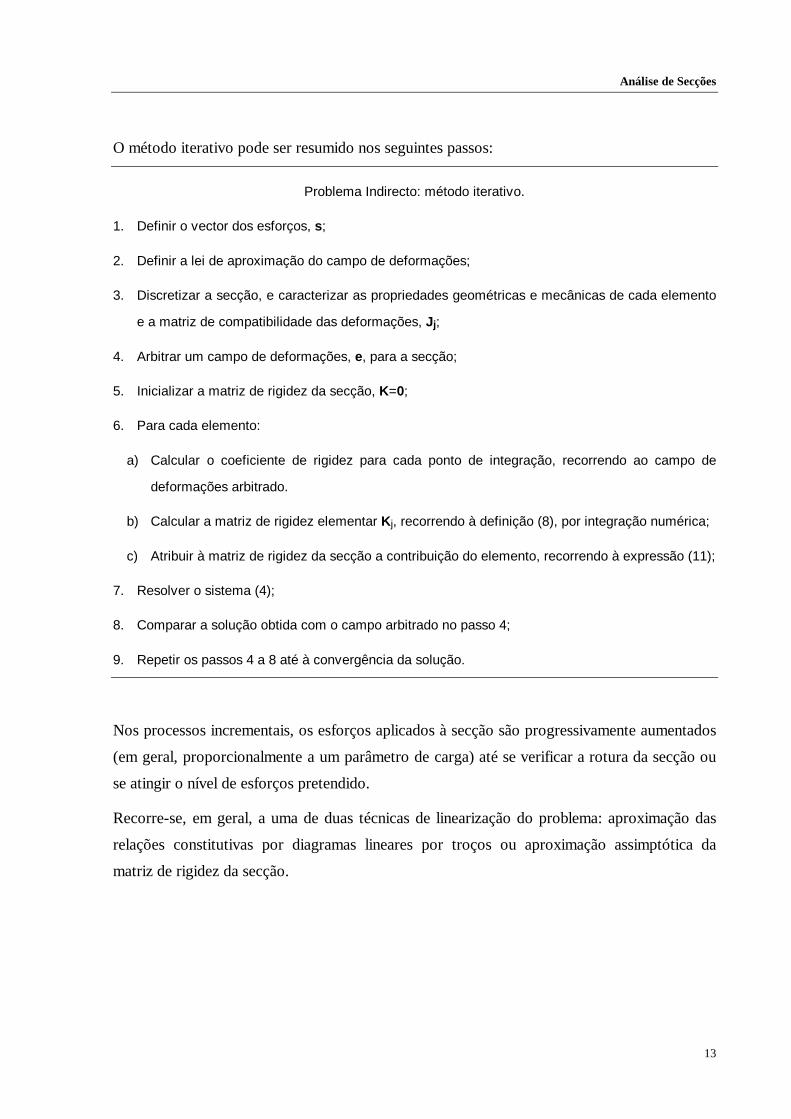
O método iterativo pode ser resumido nos seguintes passos:
Problema Indirecto: método iterativo.
1. Definir o vector dos esforços, s;
2. Definir a lei de aproximação do campo de deformações;
3. Discretizar a secção, e caracterizar as propriedades geométricas e mecânicas de cada elemento
e a matriz de compatibilidade das deformações, Jj;
4. Arbitrar um campo de deformações, e, para a secção;
5. Inicializar a matriz de rigidez da secção, K=0;
6. Para cada elemento:
a) Calcular o coeficiente de rigidez para cada ponto de integração, recorrendo ao campo de
deformações arbitrado.
b) Calcular a matriz de rigidez elementar Kj, recorrendo à definição (8), por integração numérica;
c) Atribuir à matriz de rigidez da secção a contribuição do elemento, recorrendo à expressão (11);
7. Resolver o sistema (4);
8. Comparar a solução obtida com o campo arbitrado no passo 4;
9. Repetir os passos 4 a 8 até à convergência da solução.
Nos processos incrementais, os esforços aplicados à secção são progressivamente aumentados
(em geral, proporcionalmente a um parâmetro de carga) até se verificar a rotura da secção ou
se atingir o nível de esforços pretendido.
Recorre-se, em geral, a uma de duas técnicas de linearização do problema: aproximação das
relações constitutivas por diagramas lineares por troços ou aproximação assimptótica da
matriz de rigidez da secção.

15
2 ANÁLISE DE PEÇAS LINEARES
2.1 Caracterização das variáveis
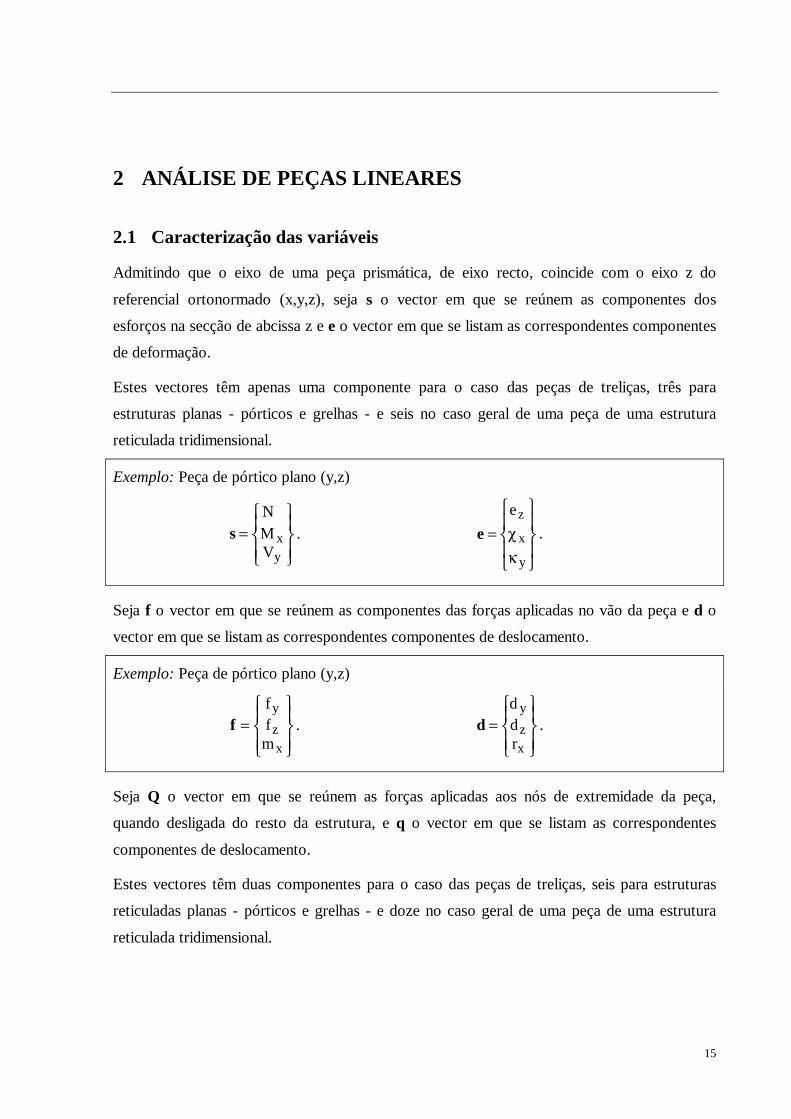
Admitindo que o eixo de uma peça prismática, de eixo recto, coincide com o eixo z do
referencial ortonormado (x,y,z), seja s o vector em que se reúnem as componentes dos
esforços na secção de abcissa z e e o vector em que se listam as correspondentes componentes
de deformação.
Estes vectores têm apenas uma componente para o caso das peças de treliças, três para
estruturas planas - pórticos e grelhas - e seis no caso geral de uma peça de uma estrutura
reticulada tridimensional.
Exemplo: Peça de pórtico plano (y,z)
=yx
VMN
s .
κχ=
y
x
ze
e .
Seja f o vector em que se reúnem as componentes das forças aplicadas no vão da peça e d o
vector em que se listam as correspondentes componentes de deslocamento.
Exemplo: Peça de pórtico plano (y,z)
=x
z
y
mff
f .
=x
z
y
rdd
d .
Seja Q o vector em que se reúnem as forças aplicadas aos nós de extremidade da peça,
quando desligada do resto da estrutura, e q o vector em que se listam as correspondentes
componentes de deslocamento.
Estes vectores têm duas componentes para o caso das peças de treliças, seis para estruturas
reticuladas planas - pórticos e grelhas - e doze no caso geral de uma peça de uma estrutura
reticulada tridimensional.
Análise de Peças Lineares
16
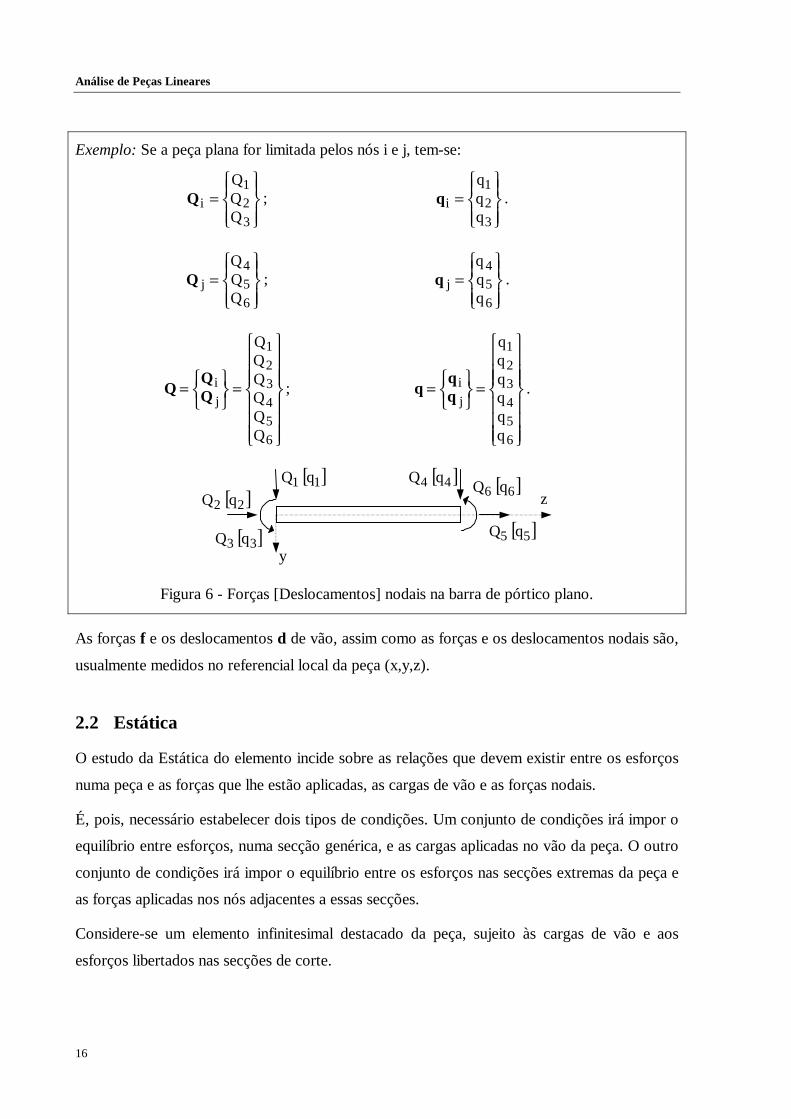
Exemplo: Se a peça plana for limitada pelos nós i e j, tem-se:
=3
21
iQQQ
Q ;
=3
21
iqqq
q .
=6
54
jQQQ
Q ;
=6
54
jqqq
q .
=
=
6
54
32
1
j
i
QQQQQQ
Q ;
=
=
6
54
32
1
j
i
qqqqqq
q .
z
y
[ ]11 qQ
[ ]22 qQ
[ ]33 qQ [ ]55 qQ
[ ]66 qQ[ ]44 qQ
Figura 6 - Forças [Deslocamentos] nodais na barra de pórtico plano.
As forças f e os deslocamentos d de vão, assim como as forças e os deslocamentos nodais são,
usualmente medidos no referencial local da peça (x,y,z).
2.2 Estática
O estudo da Estática do elemento incide sobre as relações que devem existir entre os esforços
numa peça e as forças que lhe estão aplicadas, as cargas de vão e as forças nodais.
É, pois, necessário estabelecer dois tipos de condições. Um conjunto de condições irá impor o
equilíbrio entre esforços, numa secção genérica, e as cargas aplicadas no vão da peça. O outro
conjunto de condições irá impor o equilíbrio entre os esforços nas secções extremas da peça e
as forças aplicadas nos nós adjacentes a essas secções.
Considere-se um elemento infinitesimal destacado da peça, sujeito às cargas de vão e aos
esforços libertados nas secções de corte.

Análise de Peças Lineares
17
Ao impor a condição de equilíbrio do elemento infinitesimal encontram-se relações entre a
variação do campo de esforços e as cargas aplicadas, da forma,
0fsD =+ , (14)
em que D é o operador diferencial de equilíbrio.
Se se admitir que os deslocamentos e as deformações são infinitesimais, as condições de
equilíbrio podem ser impostas sobre o elemento na sua posição inicial. Verifica-se então que o
operador diferencial de equilíbrio, D, é linear.
Exemplo:Para o caso das peças de pórtico plano, de eixo recto, a condição de equilíbrio (14)
toma o seguinte aspecto,
0=
+
−∂∂
∂
x
z
y
y
x
z
zz
mff
VMN
1000
00
em que z∂ representa o operador diferencial em ordem a z.
Exercício10: Defina o operador diferencial de equilíbrio para uma peça linear, de eixo recto,
pertencente a um pórtico tridimensional.
Exercício 11: Defina o operador diferencial de equilíbrio para uma peça linear, plana, de eixo
curvo.
A condição de fronteira, que relaciona as forças nodais com os esforços instalados nas secções
adjacentes, pode ser escrita na forma,
( )
( ) .
;
Lzj
0zi
=
=
=
=
sNQ
sNQ (15)
em que N é a imagem do operador diferencial D no espaço das normais, unitárias e exteriores,
à fronteira da peça:
.tetanconsse0
;sen
ijij
tijtij
==
∂==
DN
DN
Análise de Peças Lineares
18
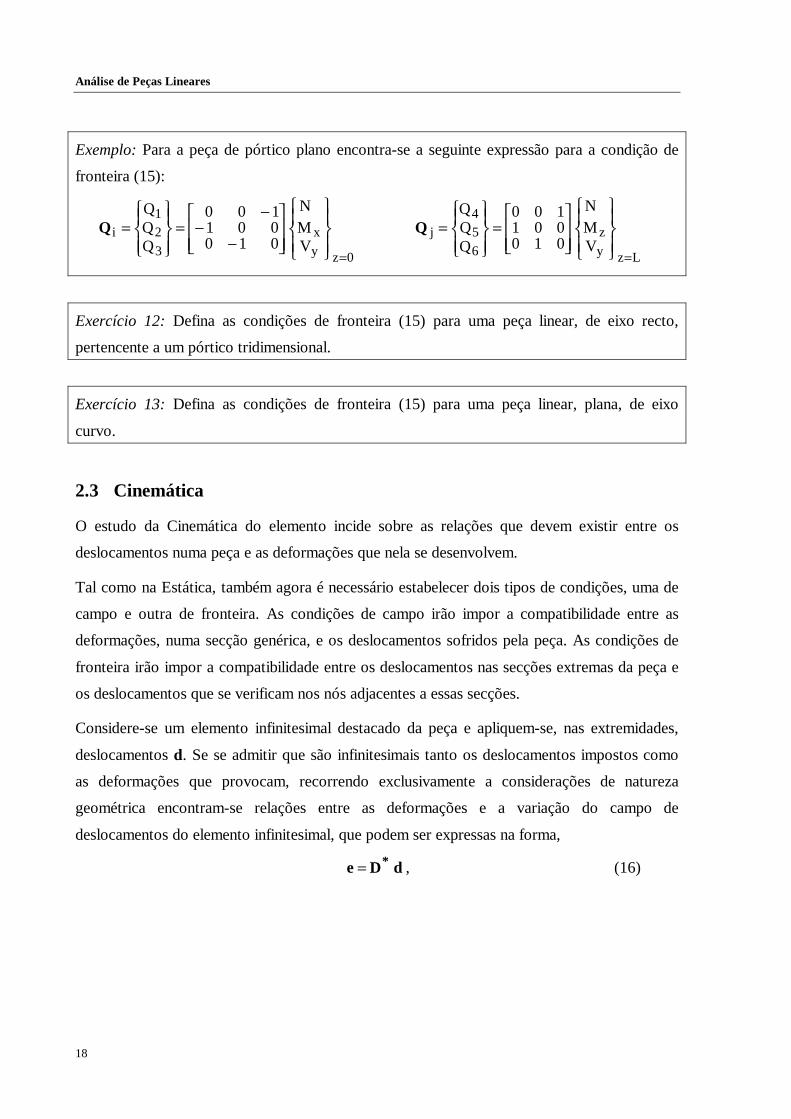
Exemplo: Para a peça de pórtico plano encontra-se a seguinte expressão para a condição de
fronteira (15):
0zy
x
3
21
iVMN
010001100
QQQ
=
−−
−=
=Q
Lzy
z
6
54
jVMN
010001100
QQQ
=
=
=Q
Exercício 12: Defina as condições de fronteira (15) para uma peça linear, de eixo recto,
pertencente a um pórtico tridimensional.
Exercício 13: Defina as condições de fronteira (15) para uma peça linear, plana, de eixo
curvo.
2.3 Cinemática
O estudo da Cinemática do elemento incide sobre as relações que devem existir entre os
deslocamentos numa peça e as deformações que nela se desenvolvem.
Tal como na Estática, também agora é necessário estabelecer dois tipos de condições, uma de
campo e outra de fronteira. As condições de campo irão impor a compatibilidade entre as
deformações, numa secção genérica, e os deslocamentos sofridos pela peça. As condições de
fronteira irão impor a compatibilidade entre os deslocamentos nas secções extremas da peça e
os deslocamentos que se verificam nos nós adjacentes a essas secções.
Considere-se um elemento infinitesimal destacado da peça e apliquem-se, nas extremidades,
deslocamentos d. Se se admitir que são infinitesimais tanto os deslocamentos impostos como
as deformações que provocam, recorrendo exclusivamente a considerações de natureza
geométrica encontram-se relações entre as deformações e a variação do campo de
deslocamentos do elemento infinitesimal, que podem ser expressas na forma,
dDe *= , (16)

Análise de Peças Lineares
19
em que *D é o operador diferencial de compatibilidade. Quando a hipótese de linearidade
geométrica é aplicada, verifica-se que o operador diferencial de compatibilidade é o adjunto
do operador diferencial de equilíbrio:
par. ordem defor derivada a se
impar; ordem defor derivada a se
ji*ij
ji*ij
DD
DD
−=
=
Exercício 14: Verifique que, para o caso de peças de pórtico plano, de eixo recto, a condição
de compatibilidade (16) toma o seguinte aspecto:
∂∂
∂=
τχ
x
z
y
z
z
z
y
x
z
r
d
d
10
00
00e
Exercício 15: Defina o operador diferencial de compatibilidade para uma peça linear, de eixo
recto, pertencente a um pórtico tridimensional.
Exercício 16: Defina o operador diferencial de compatibilidade para uma peça linear, plana,
de eixo curvo.
A condição de fronteira, que relaciona os deslocamentos nodais com os deslocamentos das
secções adjacentes, pode ser escrita na forma:
.
;
Lzj
0zi
=
=
=
=
dq
dq (17)
Exemplo: Para a peça de pórtico plano encontra-se a seguinte expressão para a condição de
fronteira (17), se se admitir que as componentes (1 e 4) correspondem aos deslocamentos
segundo y, (2 e 5) aos deslocamentos segundo z e (3 e 6) às rotações segundo x:
0zx
z
y
3
21
irdd
100010001
qqq
=
=
=q
Lzx
z
y
6
54
jrdd
100010001
qqq
=
=
=q
Análise de Peças Lineares
20
Exercício 17: Defina as condições de fronteira (17) para uma peça linear, de eixo recto,
pertencente a um pórtico tridimensional.
Exercício 18: Defina as condições de fronteira (17) para uma peça linear, plana, de eixo
curvo.
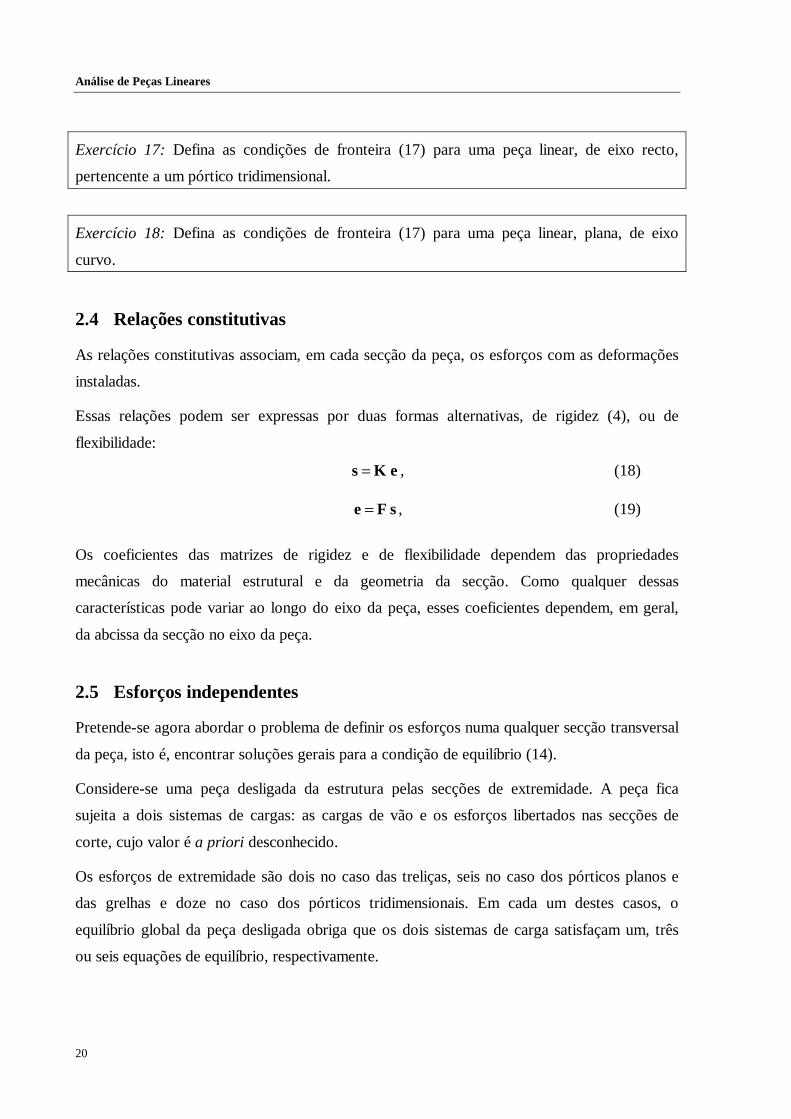
2.4 Relações constitutivas
As relações constitutivas associam, em cada secção da peça, os esforços com as deformações
instaladas.
Essas relações podem ser expressas por duas formas alternativas, de rigidez (4), ou de
flexibilidade:
eKs = , (18)
sFe = , (19)
Os coeficientes das matrizes de rigidez e de flexibilidade dependem das propriedades
mecânicas do material estrutural e da geometria da secção. Como qualquer dessas
características pode variar ao longo do eixo da peça, esses coeficientes dependem, em geral,
da abcissa da secção no eixo da peça.
2.5 Esforços independentes
Pretende-se agora abordar o problema de definir os esforços numa qualquer secção transversal
da peça, isto é, encontrar soluções gerais para a condição de equilíbrio (14).
Considere-se uma peça desligada da estrutura pelas secções de extremidade. A peça fica
sujeita a dois sistemas de cargas: as cargas de vão e os esforços libertados nas secções de
corte, cujo valor é a priori desconhecido.
Os esforços de extremidade são dois no caso das treliças, seis no caso dos pórticos planos e
das grelhas e doze no caso dos pórticos tridimensionais. Em cada um destes casos, o
equilíbrio global da peça desligada obriga que os dois sistemas de carga satisfaçam um, três
ou seis equações de equilíbrio, respectivamente.

Análise de Peças Lineares
21
Por outras palavras, só metade dos esforços de extremidade são indeterminados. Tais esforços
dizem-se independentes, em oposição aos restantes que podem ser calculados por simples
considerações de equilíbrio.
Exemplo: No caso de uma peça, de eixo recto, limitada pelas secções extremas i e j,
pertencente a um pórtico plano, encontra-se:
0RaRLVMM
0RNN
0RVV
xiyjij
zij
yij
=+−−−
=+−
=+−
em que xR , yR e zR representam as resultantes das cargas de vão, L é o vão da peça e ia é
a distância da resultante yR à secção i.
Escolhe-se para esforços independentes os que, para além de o serem, estejam associados aos
modos de deformação predominantes da peça: o esforço axial nas treliças; os dois momentos
flectores e um dos esforços axiais nos pórticos planos; os dois momentos flectores e um dos
momentos torsores nas grelhas; e os quatro momentos flectores, um dos momentos torsores e
um dos esforços axiais nos pórticos tridimensionais.
Pretende-se agora abordar o problema de definir os esforços numa qualquer secção transversal
da peça, isto é encontrar soluções gerais para a equação de equilíbrio (14).
O processo mais simples para determinar soluções gerais para a equação diferencial de
equilíbrio (14) consiste em procurar um sistema isostático que seja estaticamente equivalente
à peça em estudo, isto é, que equilibre os dois sistemas de carga, os esforços extremidade e a
solicitação de vão. Se assim se fizer, basta recorrer às equações fundamentais da estática para
determinar a expressão geral do campo de esforços em qualquer uma das secções da peça.
Uma solução corresponde, por exemplo, a equilibrar as cargas sobre a peça considerada
simplesmente apoiada: a viga fica sujeita às cargas de vão e aos esforços independentes,
aplicados nas extremidades, passando os esforços de extremidade dependentes da peça
desligada a serem simulados pelas reacções de apoio da viga. É este o processo que vai ser
aqui adoptado, apesar de ser possível utilizar qualquer outro, com um significado físico
preciso, como por exemplo o da viga em consola.

Análise de Peças Lineares
22
Se assim se proceder, encontram-se resultados que podem ser reduzidos à seguinte expressão
geral,
0sXSs += , (20)
em que X é o vector dos esforços tomados para independentes, S a matriz que reúne os
esforços devidos aos esforços independentes e 0s o vector dos esforços que equilibram as
cargas de vão.
Exemplo: Para o caso da peça de pórtico plano anteriormente considerada encontra-se a
seguinte expressão geral,
0y
x
j
ji
y
xVMN
NMM
0L1L10LzLz1100
VMN
+
−−=
=s
Como os coeficientes do vector 0s são obtidos impondo o equilíbrio da peça, devem
representar uma solução da condição diferencial de equilíbrio (14):
0fsD =+0 . (21)
Exercício 19: Verifique se a solução seguinte satisfaz a condição de equilíbrio (21), escrita
para uma peça de eixo recto, de vão L, de um pórtico plano, sujeita ao carregamento ffy = :
( )( )
−−=
z2Lf21zzLf21
0
VMN
0y
x
De modo análogo, como os coeficientes da matriz S foram obtidos equilibrando os esforços
independentes X na ausência de cargas de vão, a matriz de interpolação dos esforços deve ser
solução da equação diferencial de equilíbrio homogénea:
0SD = . (22)
Exercício 20: Verifique a equação (22) usando o resultado do exemplo anterior.
Análise de Peças Lineares
23
Por outras palavras, para alcançar o objectivo inicial, de encontrar uma solução geral para a
condição de equilíbrio (14), recorreu-se ao processo tradicional de solução de equações
diferenciais de decompor a solução em duas parcelas:
c0 sss += , (23)
em que 0s representa uma solução particular do sistema (14), como em (21), sendo a solução
complementar,
XSs =c , (24)
uma solução da equação homogénea,
0sD =c .
A parcela 0s é utilizada para representar um qualquer campo de esforços que equilibre as
cargas de vão, f. Por outras palavras, para definir a solução particular 0s é necessário e
suficiente satisfazer a condição de equilíbrio (21).
A possibilidade de equilibrar as forças de vão f recorrendo a diferentes definições para a
solução particular 0s sugere imediatamente qual deve ser a função da solução complementar
cs : cabe à solução complementar corrigir a solução particular de modo que da sua
combinação (23) resulta a definição do campo de esforços que está realmente instalado na
peça.
Para definir a solução complementar cs é necessário e suficiente utilizar campos de esforços
autoequilibrados (22), representados por tantas funções linearmente independentes quantas as
equações diferenciais de equilíbrio do elemento.
Estas conclusões permitem ultrapassar a necessidade, aparente, de se ter de atribuir um
significado físico preciso às variáveis em jogo, abrindo a possibilidade a uma generalização
de conceitos que pode ser vantajosamente explorada ao nível da automatização do cálculo das
estruturas. Em particular, cada carga de vão e cada esforço independente pode ser equilibrado
num sistema base diferente, cujo próprio significado físico é desnecessário identificar.
Exercício 21: Defina uma solução alternativa para a matriz de aproximação dos esforços para
peças de eixo recto de pórticos planos e identifique o significado físico dos coeficientes
encontrados.

Análise de Peças Lineares
24
Exercício 22: Defina uma matriz de aproximação de esforços para uma peça linear, de eixo
recto, pertencente a um pórtico tridimensional.
Exercício 23: Defina uma matriz de aproximação de esforços para uma peça linear, de eixo
curvo, de pórtico plano.
Substituindo a definição (20) na condição de fronteira (15) encontra-se a seguinte expressão
para as forças nodais da barra:
j i,kk0kk =+= QXCQ . (25)
( ) L0,zk == SNC ; (26)
( ) L0,z0k0 == sNQ . (27)
Exemplo: Para o caso da peça de pórtico plano anteriormente considerada encontra-se:
−−
−=
001
100
0L1L1
iC
−=
010
100
0L1L1
jC
A interpretação do resultado (25) mostra que:
− A coluna i da matriz de equilíbrio C representa as forças nodais que equilibram o
i-ésimo esforço independente unitário, quando todos os restantes são nulos, assim
como as cargas de vão.
− O vector 0Q representa as forças nodais que equilibram as cargas de vão quando são
nulos todos os esforços independentes.
Exercício 24: Defina a matriz de equilíbrio C para uma peça linear, de eixo recto, pertencente
a um pórtico tridimensional e indique o significado físico dos seus coeficientes.
Exercício 25: Defina a matriz de equilíbrio C para uma peça linear, de eixo curvo, de pórtico
plano e indique o significado físico dos seus coeficientes.
Análise de Peças Lineares
25
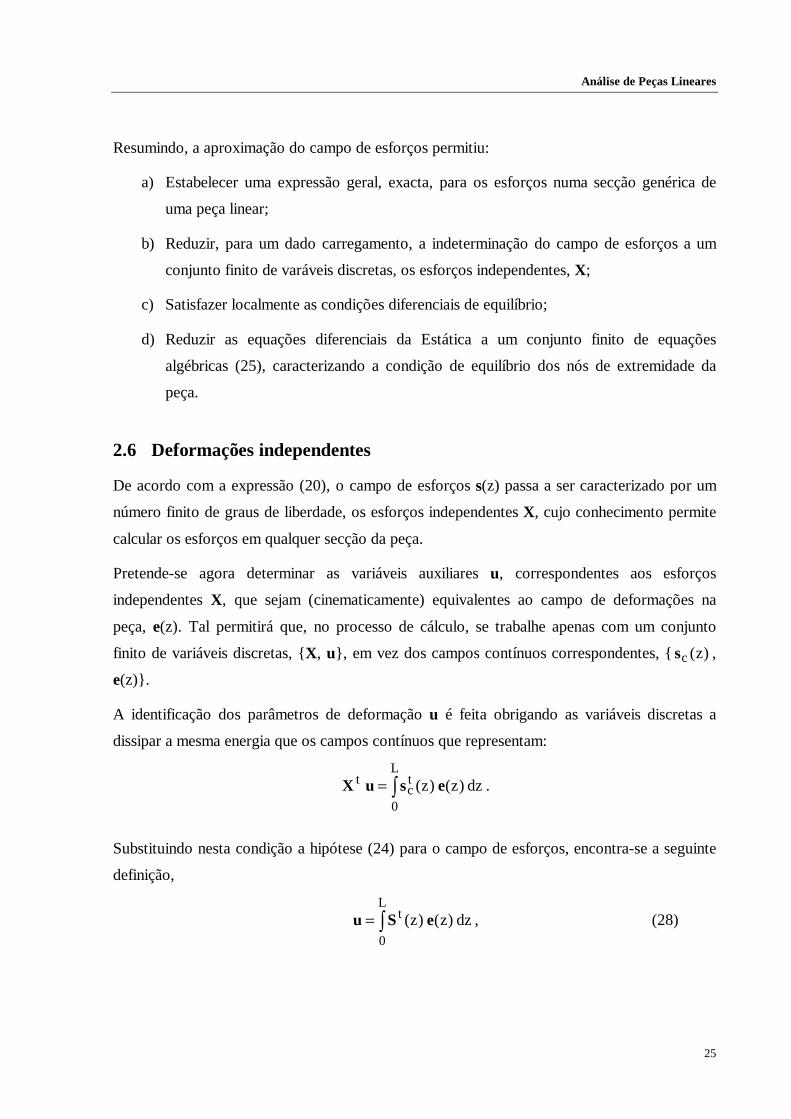
Resumindo, a aproximação do campo de esforços permitiu:
a) Estabelecer uma expressão geral, exacta, para os esforços numa secção genérica de
uma peça linear;
b) Reduzir, para um dado carregamento, a indeterminação do campo de esforços a um
conjunto finito de varáveis discretas, os esforços independentes, X;
c) Satisfazer localmente as condições diferenciais de equilíbrio;
d) Reduzir as equações diferenciais da Estática a um conjunto finito de equações
algébricas (25), caracterizando a condição de equilíbrio dos nós de extremidade da
peça.
2.6 Deformações independentes
De acordo com a expressão (20), o campo de esforços s(z) passa a ser caracterizado por um
número finito de graus de liberdade, os esforços independentes X, cujo conhecimento permite
calcular os esforços em qualquer secção da peça.
Pretende-se agora determinar as variáveis auxiliares u, correspondentes aos esforços
independentes X, que sejam (cinematicamente) equivalentes ao campo de deformações na
peça, e(z). Tal permitirá que, no processo de cálculo, se trabalhe apenas com um conjunto
finito de variáveis discretas, X, u, em vez dos campos contínuos correspondentes, )z(cs ,
e(z).
A identificação dos parâmetros de deformação u é feita obrigando as variáveis discretas a
dissipar a mesma energia que os campos contínuos que representam:
∫=L
0
tc
t dz)z()z( esuX .
Substituindo nesta condição a hipótese (24) para o campo de esforços, encontra-se a seguinte
definição,
∫=L
0
t dz)z()z( eSu , (28)

Análise de Peças Lineares
26
a qual demonstra que o vector u reúne resultantes de deformação correspondentes aos
esforços independentes X.
Exemplo: Para o caso da peça de pórtico plano anteriormente considerada encontra-se:
∫
κχ
−−=
θθ
=
L
0 y
x
z
j
j
i
dz
e
001
L1Lz0
L1Lz10
e
u .
Estas definições demonstram que iθ e jθ representam, respectivamente, as rotações das
secções extremas da peça medidas em relação à corda, isto é, o segmento que as une; je
representa a deformação axial da corda.
Exercício 26: Defina e represente graficamente as deformações independentes u para uma
peça linear, de eixo recto, pertencente a um pórtico tridimensional.
Exercício 27: Defina e represente graficamente as deformações independentes u para uma
peça linear, de eixo curvo, de pórtico plano.
Para garantir que as deformações independentes u são compatíveis com os deslocamentos d
na peça, basta impor na definição (28) a condição diferencial de compatibilidade (16):
∫=L
0
*t dzdDSu .
Integrando por partes, encontra-se o seguinte resultado:
( )[ ] ( )∫−=L
0
tL0
t dzdSDdSNu .
Atendendo à condição (22) e à condição de fronteira (17), esta definição reduz-se à seguinte
forma,
jjii qAqAu += ; (29)
em que, de acordo com os resultados (26):
j i,ktkk == CA ; (30)
Análise de Peças Lineares
27
A interpretação da definição (29) mostra que a coluna i da matriz de compatibilidade A
representa as deformações independentes devidas ao i-ésimo deslocamento nodal unitário
quando todos os restantes são nulos.
Exercício 28: Verifique a afirmação anterior para o caso da peça linear, de eixo recto,
pertencente a um pórtico plano.
Resumindo:
a) As deformações independentes representam resultantes do campo de deformações na
peça;
b) As deformações independentes são determinadas impondo as condições diferenciais
de compatibilidade (16) e satisfazendo as condições de fronteira (17);
c) As deformações independentes são determinadas sem ser necessário arbitrar o campo
de deslocamentos na peça.
2.7 Relações esforços-deformações
Para obter a relação entre os esforços independentes X e as deformações independentes u,
basta substituir as relações constitutivas (19) na definição (28) e eliminar aí o campo de
esforços usando a aproximação (20), encontrando-se a expressão seguinte:
0b uXFu += ; (31)
∫=L
0
tb dzdSFSF ; (32)
∫=L
00
t0 dzsFSu . (33)
A definição (32) mostra que a matriz de flexibilidade bF é simétrica, sendo positiva definida
se as funções de interpolação dos esforços forem linearmente independentes.

Análise de Peças Lineares
28
A interpretação da definição (31) mostra que:
− A coluna i da matriz de flexibilidade bF representa as deformações independentes
devidas ao i-ésimo esforço independente unitário, quando todos os restantes são nulos,
assim como as cargas de vão;
− O vector 0u representa as deformações independentes devidas às cargas de vão
quando são nulos os esforços independentes.
Quando a matriz de flexibilidade bF for positiva definida, as relações esforços-deformações
podem ser expressas na forma alternativa,
0b XuKX += , (34)
em que a matriz de rigidez bK é a inversa da matriz de flexibilidade bF , e
0b0 uKX −= . (35)
A interpretação da definição (34) mostra que:
− A coluna i da matriz de flexibilidade bK representa os esforços independentes devidos à
i-ésima deformação independente unitária, quando todas as restantes são nulas, assim
como as cargas de vão;
− O vector 0X representa os esforços independentes devidos às cargas de vão quando são
nulas as deformações independentes.
Exercício 29: Verifique que, para o caso da peça linear, de eixo recto, pertencente a um
pórtico plano se tem:
=
)EA(L000)EI3(L)EI6(L0)EI6(L)EI3(L
bF
−
−=
LEA000LEI4LEI20LEI2LEI4
bK
quando se considera nula a deformabilidade por corte.
Exercício 30: Represente graficamente os resultados do exercício anterior.
Exercício 31: Defina as matrizes de flexibilidade e de rigidez para uma peça linear, de eixo
recto, pertencente a um pórtico tridimensional.

Análise de Peças Lineares
29
Exercício 32: Defina a expressão geral do vector 0u para uma peça linear, de eixo recto,
pertencente a um pórtico tridimensional.
Exercício 33: Defina as matrizes de flexibilidade e de rigidez para uma peça linear, de eixo
curvo, pertencente a um pórtico plano.
Exercício 34: Defina a expressão geral do vector 0u para uma peça linear, de eixo curvo,
pertencente a um pórtico plano.
2.8 Equação fundamental do método dos deslocamentos
De acordo com os resultados anteriores, são as seguintes as equações que caracterizam o
comportamento das peças lineares:
0t QXAQ += ; (36)
qAu = ; (37)
0b XuKX += . (38)
Para obter a equação fundamental do método dos deslocamentos, basta agora eliminar as
deformações nas relações constitutivas (38) recorrendo à condição de compatibilidade (37),
0b XqAKX += , (39)
e utilizar este resultado para eliminar os esforços independentes na condição de equilíbrio
nodal (36), ficando:
QqKQ ′+= ; (38)
AKAK bt= ; (39)
0t
0 XAQQ +=′ . (40)

Análise de Peças Lineares
30
A interpretação da definição (38) mostra que:
− A coluna i da matriz de rigidez da barra, K , representa as forças nodais devidas ao
i-ésimo deslocamento nodal unitário, quando todos os restantes são nulos, assim como as
cargas de vão;
− O vector Q′ , representa as forças nodais devidas às cargas de vão quando são nulos todos
os deslocamentos nodais.
Interessa generalizar o resultado (38) pra o caso em que os deslocamentos e as forças nodais
não são medidos no referencial local da peça mas num qualquer referencial, por exemplo o da
estrutura a que a barra pertence.
Sejam *q , *Q os deslocamentos e as forças nodais medidos no referencial ortogonal *x .
Por considerações de natureza geométrica e estática, respectivamente, encontram-se as
seguintes relações:
*qTq = ; (41)
QTQ t* = . (42)
Exercício 35: Defina a matriz de transformação de coordenadas T para uma peça linear, de
eixo recto, pertencente a um pórtico plano.
Exercício 36: Defina a matriz de transformação de coordenadas T para uma peça linear, de
eixo recto, pertencente a uma grelha.
Exercício 37: Defina a matriz de transformação de coordenadas T para uma peça linear, de
eixo recto, pertencente a um pórtico tridimensional.
Recorrendo aos resultados (41) e (42), encontram-se as seguintes expressões para as equações
fundamentais das peças lineares escritas em termos de um referencial global:
0*t* QXAQ* += ; (43)
** qAu = ; (44)
0b XqAKX * += , (45)

Análise de Peças Lineares
31
*** QqKQ ′+= * ; (46)
*AKAK bt** = ; (47)
0t
0* XAQQ ** +=′ ; (48)
TAA =* . (49)
Exercício 38: Defina e represente graficamente a matriz de rigidez nodal para uma peça
linear, de eixo recto, pertencente a um pórtico plano.
Exercício 39: Defina e represente graficamente a matriz de rigidez nodal para uma peça
linear, de eixo recto, pertencente a um pórtico tridimensional.











![ANÁLISE DE DESEMPENHO DE DIVERSIDADE …repositorio.unb.br/bitstream/10482/18377/1/2015_KaiePimentelAt... · 5.6 BER para diferentes valores de ... W Largura de banda do canal [Hz]](https://static.fdocument.org/doc/165x107/5a9db3e37f8b9aee528b86d3/anlise-de-desempenho-de-diversidade-ber-para-diferentes-valores-de-w-largura.jpg)