06 is Curs Principal - Estimare si identificare
19
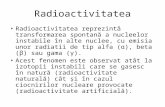
o o Modele Modele de de identificare identificare o o . . q q Modele Modele parametrice parametrice RSISO RSISO ARMAX ARMAX De stare De stare Clasa Clasa RSISO RSISO RSISO[na,nb,nc,nd,nf RSISO[na,nb,nc,nd,nf ,< ,< nk nk >] >] 1 1 1 1 1 2 0 ( ) ( ) ( )[] [] [] ( ) ( ) {[][ ]} [ ] Bq Cq A q yn un en Fq Dq Eenem n m − − − − − ⎧ = + ⎪ ⎨ ⎪ =λδ − ⎩ , nm ∀ ∈ N 1 1 1 1 1 1 1 1 1 1 ( ) 1 ( ) ( ) ( ) 1 na na nb nk nb nc nc Aq aq a q Bq bq bq q Cq cq cq − − − − − − − − − − ⎡ = + + + ⎢ = + + ⎢ ⎢ = + + + ⎣ polinoame polinoame indici indici structurali structurali î î nt nt î î rziere rziere intrinsecă intrinsecă RSISO RSISO Clase Clase uzuale uzuale de de modele modele liniare liniare Modele Modele de tip de tip SISO SISO Raţionale Raţionale + + polinoame polinoame coprime coprime ( , ) 1 DF = ( ( cmmdc cmmdc ) ) 1 1 1 1 1 1 ( ) 1 ( ) 1 nd nd nf nf Dq dq d q Fq fq f q − − − − − − ⎡ = + + + ⎢ = + + + ⎢ ⎣ 101 101 H H ≡ ≡ B/(AF) B/(AF) G G ≡ ≡ C/(AD) C/(AD) + + e e u u y y v v Filtru Filtru de de sistem sistem Filtru Filtru de de zgomot zgomot 1 1 1 1 ( ) ( ) ( ) ( ) def Bq Hq A q Fq − − − − = 1 1 1 1 ( ) ( ) ( ) ( ) def Cq Gq A q Dq − − − − = Reprezentare Reprezentare sistemică sistemică • Se Se elimină elimină r r estric estric ţ ţ ia ia impusă impusă î î n n cadrul cadrul clasei clasei ARMAX ARMAX ca ca ambele filtre ambele filtre ( ( de de sistem sistem ş ş i de zgomot) i de zgomot) să aibă aceia să aibă aceia ş ş i poli i poli . . * * Pot Pot exista exista , , î î nsă nsă , , poli poli comuni comuni . .
-
Upload
nitescu-ion-laurentiu -
Category
Documents
-
view
17 -
download
0
description
Curs Principal - Estimare si identificare
Transcript of 06 is Curs Principal - Estimare si identificare

1/19ModeleModele de de identificareidentificare.. ModeleModele parametriceparametrice
RSISORSISOARMAXARMAX De stareDe stare
ClasaClasa RSISORSISO
RSISO[na,nb,nc,nd,nf,<nk>]RSISO[na,nb,nc,nd,nfRSISO[na,nb,nc,nd,nf,<,<nknk>]>]
1 11
1 1
20
( ) ( )( ) [ ] [ ] [ ]( ) ( )
[ ] [ ] [ ]
B q C qA q y n u n e nF q D q
E e n e m n m
− −−
− −
⎧= +⎪
⎨⎪ = λ δ −⎩ ,n m∀ ∈N
1 11
1 1 11
1 11
( ) 1
( ) ( )
( ) 1
nana
nb nknb
ncnc
A q a q a q
B q b q b q q
C q c q c q
− − −
− − − −
− − −
⎡ = + + +⎢
= + +⎢⎢ = + + +⎣
polinoamepolinoame
indiciindicistructuralistructurali
îîntntîîrziererziereintrinsecăintrinsecă
RSISORSISO
Clase uzuale de modele liniareClaseClase uzualeuzuale de de modelemodele liniareliniare
Modele de tip SISO RaţionaleModeleModele de tip de tip SISOSISO RaţionaleRaţionale
++polinoamepolinoamecoprimecoprime
( , ) 1D F =((cmmdccmmdc))
1 11
1 11
( ) 1
( ) 1
ndnd
nfnf
D q d q d q
F q f q f q
− − −
− − −
⎡ = + + +⎢
= + + +⎢⎣
101101
H ≡ B/(AF)H H ≡≡ B/(AF)B/(AF)
G ≡ C/(AD)G G ≡≡ C/(AD)C/(AD)
++
ee
uu yyvvFiltruFiltru de de sistemsistem
FiltruFiltru de de zgomotzgomot
11
1 1
( )( )( ) ( )
def B qH qA q F q
−−
− −=1
11 1
( )( )( ) ( )
def C qG qA q D q
−−
− −=
Reprezentare sistemicăReprezentareReprezentare sistemicăsistemică
• Se Se eliminăelimină rrestricestricţţiaia impusăimpusă îînn cadrulcadrul claseiclasei ARMAXARMAX ca ca ambele filtreambele filtre ((de de sistemsistem şşi de zgomot) i de zgomot) să aibă aceiasă aibă aceiaşşi polii poli. .
Pot exista, însă, poli comuni. Pot Pot existaexista, , îînsănsă, , polipoli comunicomuni. .

2/19
ARMAX[na,nb,nc,<nk>]ARMAX[na,nb,ncARMAX[na,nb,nc,<,<nknk>]>]
Modelele clasei ARMAX sunt şi modele ale clasei RSISO. ModeleleModelele claseiclasei ARMAXARMAX suntsunt şşii modelemodele ale ale claseiclasei RSISORSISO. .
ModeleModele de de identificareidentificare.. ModeleModele parametriceparametrice
ClasaClasa RSISORSISO
102102
Modele particulare uzualeModeleModele particulareparticulare uzualeuzuale
RSISO[na,nb,nc,0,0,<nk>]RSISO[na,nb,nc,RSISO[na,nb,nc,00,,00,<,<nknk>]>]
Clasa RSISO include clasa ARMAX, fiind mai generală (bogată) decît aceasta. ClasaClasa RSISORSISO include include clasaclasa ARMAXARMAX, , fiindfiind maimai generalăgenerală ((bogatăbogată) ) decdecîîtt aceastaaceasta. .
1( ) 1D q− = 1( ) 1F q− =
• ÎÎnn aplicaaplicaţţiiii suntsunt îînsănsă utilizateutilizate şşii modelemodele de tip de tip RSISORSISOcare care nunu facfac parteparte din din clasaclasa ARMAXARMAX. .
FIFN[nb,nc,nd,nf,<nk>]FIFN[nb,nc,nd,nfFIFN[nb,nc,nd,nf,<,<nknk>]>]
1 1
1 1
20
( ) ( )[ ] [ ] [ ]( ) ( )
[ ] [ ] [ ]
B q C qy n u n e nF q D q
E e n e m n m
− −
− −
⎧= +⎪
⎨⎪ = λ δ −⎩ ,n m∀ ∈N
1( ) 1A q− =
FFilterediltered IInput nput FFilterediltered NNoiseoise((intrareintrare şşii zgomotzgomot filtrate independent)filtrate independent)
• FiltrulFiltrul de de sistemsistem şşii filtrulfiltrul de de zgomotzgomotnunu au au polipoli comunicomuni, , faptfapt care care justificăjustificăprima prima denumiredenumire a a modeluluimodelului..
BJ[nb,nc,nd,nf,<nk>]BJ[nb,nc,nd,nfBJ[nb,nc,nd,nf,<,<nknk>]>] BBoxox JJenkinsenkins ((denumiredenumire echivalentăechivalentă))
• Decuplarea dintre partea utilă Decuplarea dintre partea utilă şşi cea parazită i cea parazită este necesară este necesară îîn aplican aplicaţţiile unde sursa de iile unde sursa de zgomot este zgomot este independentăindependentă de de proces.proces.
• În mod normal, acest model de identificare ar fi cel mai recomanÎn mod normal, acest model de identificare ar fi cel mai recomandat în majoritatea dat în majoritatea aplicaţiiloraplicaţiilor, , dacădacă implementaimplementarearea sasa nunu arar fifi atîtatît de de dificilădificilă, din , din cauzacauza complextăcomplextăţiiţii ridicateridicate..

3/19
Factorizare spectrală + Predicţie de stare prin filtrare KalmanFactorizareFactorizare spectralăspectrală + + PredicPredicţţieie de stare de stare prinprin filtrarefiltrare KalmanKalman
ModeleModele de de identificareidentificare.. ModeleModele parametriceparametrice
RSISORSISOARMAXARMAX De stareDe stare
ClasaClasa modelelormodelelor de starede stare
0
0
, 0
[ 1] ( ) [ ] ( ) [ ] ( ) [ ][ ] ( ) [ ] ( ) [ ] [ ] [ ] ( ) [ ]
[ ] [ ] ( ) [ ]
[ ] [ ] ( ) [ ]
T
T
T
n n n nn n n
E n m n m
E n m n m
E n m n m
⎧ + ≡ + +⎪
≡ +⎪⎪ = δ −⎨⎪ = δ −⎪⎪ = δ −⎩
e
w
e w
x A θ x B θ u E θ wy C θ x F θ e
e e Λ θ
w w Λ θ
e w Λ θ,n m∀ ∈N
103103
• Vectorul parametrilor necunoscuVectorul parametrilor necunoscuţţiiinclude include coeficiencoeficienţţii matricilorii matricilorimplicaimplicate te îîn ecuan ecuaţţiileiile modeluluimodelului. .
De stareDe stare
Clase uzuale de modele liniareClaseClase uzualeuzuale de de modelemodele liniareliniare
• RRareori zgomotul intern areori zgomotul intern ((ww)) şşi cel i cel
extern extern ((ee)) apar apar îîmpreună mpreună îîntrntr--un un model de stare. model de stare.
• ÎÎn general n general modelele cu două surse modelele cu două surse de zgomot sunt evitatede zgomot sunt evitate,,îînncercerccîîndundu--sese echivalareaechivalarea lor cu lor cu ajutorul unor ajutorul unor modele avmodele avîînd o nd o singură sursă de zgomotsingură sursă de zgomot..
• Dacă este totuDacă este totuşşi necesară prezeni necesară prezenţţa ambelor zgomote,a ambelor zgomote, se presupune că ele sunt se presupune că ele sunt necorelatenecorelate. . , ( ) ≡e wΛ θ 0• ComplexitateaComplexitatea modelelor modelelor dde stare este, e stare este, îîn general, n general, ridicatăridicată..
DDAAEsteEste acestaacesta un un cazcazparticular al particular al modeluluimodeluluigeneral de general de identificareidentificare??
T ST S ( ) 11( , ) ( ) ( ) ( )def
q q −− = −H θ C θ I A θ B θ1( , )q−G θ

4/19
Polinomulreciproc
PolinomulPolinomulreciprocreciproc
Dar poate fi estimată, fapt care complică metoda de identificareşi reduce precizia modelului.
Dar Dar poatepoate fifi estimatăestimată, , faptfapt care care complicăcomplică metodametoda de de identificareidentificareşşii reduce reduce preciziaprecizia modeluluimodelului. .
]
1 2 1 2 1 2
[ ] [ 1] [ 2] [ ] [ 1] [ 2] [ ] ...
... [ 1] [ 2] [ ]
defT
defT
na nb nc
n y n y n y n na u n u n u n nb
e n e n e n nc
a a a b b b c c c
⎡ = − − − − − − − − −⎡⎣⎢⎢ − − −⎢⎢
⎡ ⎤=⎢ ⎣ ⎦⎣θ
ϕ
ModeleModele de de identificareidentificare.. ModeleModele parametriceparametrice
104104
Forma de regresie liniarăForma de Forma de regresieregresie liniarăliniară [ ] [ ] [ ]Ty n n e n= +θϕn ∗∀ ∈N
Vectorul regresorilorVectorulVectorul regresorilorregresorilor
Format din date măsurate şi, eventual, estimate.FFormat din date măsurate ormat din date măsurate şşi, eventual, estimatei, eventual, estimate..
Ieşirea depinde liniar de vectorulparametrilor necunoscuţi. IeIeşşireairea depindedepinde liniarliniar de de vectorulvectorulparametrilorparametrilor necunoscunecunoscuţţii. .
ARMAX[na,nb,nc]ARMAX[na,nb,ncARMAX[na,nb,nc]]
n ∗∀ ∈N
3 3 componentecomponente, , ca ca şşii vectorulvectorul parametrilorparametrilor
Ultima componentănu este măsurabilă. UltimaUltima componentăcomponentănunu esteeste măsurabilămăsurabilă. .
ExerciţiuExerciţiuExerciţiu • SăSă se se indiceindice toatetoate modelelemodelele din din clasaclasa ARMAXARMAXpentrupentru care care vectorulvectorul regresorilorregresorilor conconţţineinenumainumai componentecomponente măsurabilemăsurabile. .
Stabilitatea modelelor parametrice raţionaleStabilitateaStabilitatea modelelormodelelor parametriceparametrice raţionaleraţionale
• Testarea stabilităTestarea stabilităţţii revine adesea la verificarea proprietăii revine adesea la verificarea proprietăţţii unui polinomii unui polinomde a de a aveaavea zerourilezerourile îînn interiorulinteriorul disculuidiscului unitarunitar din din planulplanul complexcomplex..
( )1 1 1,1 , ,1 ,( ) 1 M M M M
M M M M M MA z a z a z z z a z a− − − − −= + + + = + + +
• AcestAcest lucrulucru se se poatepoate realizarealiza cu cu ajutorulajutorul CriteriuluiCriteriului de de stabilitatestabilitate SchSchüürr--CohnCohn..
1 1 1,1 ,( ) ( )
defM M M
M M MA z z A z z a z a− − + − −= = + + +
Coeficientde reflexieCoeficientCoeficientde de reflexiereflexie
,
def
M M Mk a=

5/19ModeleModele de de identificareidentificare.. ModeleModele parametriceparametrice
105105
Criteriul de stabilitate Schür-CohnCriteriulCriteriul de de stabilitatestabilitate SchSchüürr--CohnCohn
IniţializareIniIniţţializareializare
m M=
Buclă iterativăBuclăBuclă iterativăiterativă
Date de intrareDate de Date de intrareintrare
1mk ≥
1 1( ) ( )MA z A z− −=
((primulprimul coeficientcoeficient de de reflexiereflexie)),M M Mk a=
((primulprimul polinompolinom furnizorfurnizor de de coeficientcoeficient de de reflexiereflexie))
((primulprimul indiceindice))
Cît timpCCîîtt timptimp 1mk < & 0m >
DacăDacăDacă 1m >
a. Se evaluează polinomul următor, care foloseşte atît polinomul curent, cît şi polinomul reciproc asociat:
a.a. Se Se evalueazăevaluează polinomulpolinomul următorurmător, care , care folosefoloseşştete atatîîtt polinomul curent, polinomul curent, ccîît t şşi polinomul reciproc asociat:i polinomul reciproc asociat:
1 11 1 1
1 1,0 1,1 1, 12
( ) ( )( )1
mm m mm m m m m
m
A z k A zA z a a z a zk
− −− − −
− − − − −
−= = + + +
−
b. Se extrage coeficientul următor de reflexie:b.b. Se eSe extragextrage coeficientul următor de reflexie coeficientul următor de reflexie:: 1 1, 1m m mk a− − −=
Se decrementează indicele curent: Se Se decrementeazădecrementează indiceleindicele curentcurent: : 1m m← −
Test finalTest finalTest final0m >
0m =
Polinomul este instabil. PolinomulPolinomul esteeste instabilinstabil. .
1,[0,1)i i M
k∈
⊂
Toţi coeficienţii de reflexie se situeazăîn discul unitar.
ToToţţii coeficiencoeficienţţiiii de de reflexiereflexie se se situeazăsitueazăîînn disculdiscul unitarunitar. .
Polinomul este stabil. PolinomulPolinomul esteeste stabilstabil. .
1,0 1ma − =
1 1,1 ,( ) 1 M
M M MA z a z a z− − −= + + + ((coeficiencoeficienţţiiii polinomuluipolinomului))
CriteriulHurwitzCriteriulCriteriulHurwitzHurwitz
Sisteme continue SistemeSisteme continue continue
(Sisteme discrete) ((SistemeSisteme discrete) discrete)

6/19
uu [[nn]]
P (θ*)PP ((θθ**))
M (θ)MM ((θθ))
yy [[nn]]
yyMM [[nn,,θθ]]
UU YY V (θ) | P(θ)VV ((θθ)) | P| P((θθ))
OptimizareOptimizare
ConsistenConsistenţţăăNedeviereNedeviere ((asimptoticăasimptotică)) EficienEficienţţăă
ModeleModele de de identificareidentificare
106106
• Deoarece datele pe baza cărora se determină modele Deoarece datele pe baza cărora se determină modele de de identificareidentificare sunt afectate sunt afectate de perturbaţii de perturbaţii stocasticestocastice, , parametrii estimaţi au parametrii estimaţi au de de asemeneaasemenea o natură stocasticăo natură stocastică..
Adecvanţa parametrilor estimaţi ai unui model de identificareeste descrisă prin intermediul a 3 proprietăţi.
AdecvanAdecvanţţaa parametrilorparametrilor estimaestimaţţii aiai unuiunui model de model de identificareidentificareesteeste descrisădescrisă prinprin intermediulintermediul a a 3 3 proprietăproprietăţţii. .
abaterea faabaterea faţţă de ă de media statisticămedia statistică
convergenconvergenţţaa statisticăstatistică
vitezaviteza de de convergenconvergenţţăă
Contextul de lucruContextulContextul de de lucrulucru
VectorulVectorul parametrilorparametrilorestimaestimaţţii folosindfolosind un un orizontorizont de de măsurămăsură de de dimensiunedimensiune NN, vector , vector
renotatrenotat prinprin:: ˆ nN
θ∈θ R
. Problema identificării modelelor parametrice.. Problema identificării modelelor parametriceProblema identificării modelelor parametrice

7/19ModeleModele de de identificareidentificare
NedeviereNedeviereNedeviere ˆ NE ∗=θ θN ∗∀ ∈N
ExempluExempluExemplu Cazul parametrului scalarCazulCazul parametruluiparametrului scalarscalar
θθNN
NN00
θθ**
EE θθNN^
NN11 NN22...... NN pp
NedeviereasimptoticăNedeviereNedeviere
asimptoticăasimptoticăˆlim NN
E ∗
→∞=θ θ
ExempluExempluExemplu Cazul parametrului scalarCazulCazul parametruluiparametrului scalarscalar
θθNN
NN00
θθ**
EE θθNN^
NN11 NN22...... NN pp
Proprietate destul de restrictivă şi dificil de verificat în practică.PProprietate destul de restrictivă roprietate destul de restrictivă şşi i dificil de verificatdificil de verificat îîn practicăn practică..
• Dacă media statistică a parametrilor estimaDacă media statistică a parametrilor estimaţţi nu i nu verifică verifică aceastăaceastă proprietate, atunci estimaproprietate, atunci estimaţţia se ia se consideră consideră deviatădeviată..
DeviaţieDeviaţieDeviaţie
Proprietate relaxatăProprietateProprietate relaxatărelaxată
ˆ def
N NE∗= −∆ θ θN ∗∀ ∈N
ˆlim lim 0N NN NE ∗
→∞ →∞= ⇔ =θ θ ∆
107107
. Proprietăţi statistice dezirabile ale estimaţiilor parametrice.. ProprietăProprietăţi statistice dezirabile ale estimaţiilor parametriceţi statistice dezirabile ale estimaţiilor parametrice

8/19
( )2 ˆlim 0NN→∞σ =θ
ModeleModele de de identificareidentificare
ConsistenţăConsistenţăConsistenţă ˆlim NN
∗
→∞=θ θ ExempluExempluExemplu Cazul parametrului scalarCazulCazul parametruluiparametrului scalarscalar
θθNN
NN00
θθ**
EE θθNN^
NN11 NN22...... NN pp
Toate realizările estimaţiilor converg la valoarea adevărată.ToateToate realizărilerealizările estimaestimaţţiiloriilor convergconverg la la valoareavaloarea adevăratăadevărată..
• RelevăRelevă maniera maniera îîn care n care se grupeazăse grupează estimaestimaţţiile iile îîn jurul mediei (n jurul mediei (sau al valorilor adevăratesau al valorilor adevărate))..
((clecleşşteletele consistenconsistenţţeiei))
EstimaEstimaţţiile consistente pot fi deviate, dar iile consistente pot fi deviate, dar sunt sunt îîntotdeauna asimptotic nedeviate.ntotdeauna asimptotic nedeviate.
ExerciţiuExerciţiuExerciţiu
• RaportulRaportul dintredintre consistenconsistenţţăă şşii nedevierenedeviere ((asimptoticăasimptotică))esteeste ilustratilustrat de de următoareaurmătoarea proprietateproprietate::
• O O altăaltă proprietateproprietate interesantăinteresantă esteeste legatălegată de de conceptulconceptul de de varianvarianţţăă a a eroriierorii de de estimareestimare. .
( ) 22def
E ∗σ = − ∈θ θ θ RProdusul interior (scalar).ProdusulProdusul interior (scalar).interior (scalar).
Matrice de auto-covarianţăMatriceMatrice de autode auto--covarianţăcovarianţă
( ) ( )( ) def
T n nE ∗ ∗ θ× θ= − − ∈P θ θ θ θ θ R
Produsul exterior.ProdusulProdusul exterior.exterior.
ExerciţiuExerciţiuExerciţiu ( )ˆ ˆlim lim 0N NN N
∗
→∞ →∞= ⇔ =θ θ P θ
se poatearăta
se se poatepoatearătaarăta
Dispersie tot mai micăîn jurul mediei.
DispersieDispersie tot tot maimai micămicăîînn juruljurul medieimediei..
Consistenţa este proprietatea cea mai importantă.ConsistenConsistenţţaa esteeste proprietateaproprietatea ceacea maimai importantăimportantă..
108108
.. ProprietăProprietăţi statistice dezirabile ale estimaţiilor parametriceţi statistice dezirabile ale estimaţiilor parametrice

9/19
Consistenţă lentă.ConsistenConsistenţţăă lentălentă..
A
1( ) 0∆ ≥A
ModeleModele de de identificareidentificare
EficienţăEficienţăEficienţă ˆNθ
ExempluExempluExemplu Cazul parametrului scalarCazulCazul parametruluiparametrului scalarscalar
θθNN
NN00
θθ**
EE θθNN^
NN11 NN22...... NN pp
esteeste celcel pupuţţin tot in tot atatîîtt de de eficientăeficientă caca
• EficienþaEficienþa esteeste asimilatăasimilată cu cu vitezaviteza de de consistenconsistenţţăă. .
În sensul pozitiv(semi-)definirii.ÎÎnn sensulsensul pozitivpozitiv(semi(semi--))definiriidefinirii..
( ) ( )ˆN N≤P θ P θ
Nθ dacădacă::
( ) ( )ˆ 0N N− ≥P θ P θ
θθNN~~
NN00
θθ**
EE θθNN~~
NN11 NN22...... NN pp
0T ≥x Axn∀ ∈x R
( ) +σ ⊂A Rspectrulspectrulmatriciimatricii
determinandeterminanţţiiiiSylvesterSylvester
2 ( ) 0∆ ≥A
det( ) 0≥A
Consistenţă rapidă.ConsistenConsistenţţăă rapidărapidă..
( )ˆ ˆlim lim 0N NN N
∗
→∞ →∞= ⇔ =θ θ P θ
109109
.. ProprietăProprietăţi statistice dezirabile ale estimaţiilor parametriceţi statistice dezirabile ale estimaţiilor parametrice

10/19
Prin stimularea cu o treaptă unitară.
PrinPrin stimulareastimularea cu cu o o treaptătreaptă unitarăunitară. .
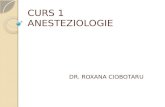
SemnaleSemnale de de stimulstimul. Necesitatea stimulării corecte a proceselor.. NecesitateaNecesitatea stimulăriistimulării corectecorecte a a proceselorproceselor
• Stimularea Stimularea incorectăincorectă a proceselor a proceselor ((îîn vederea identificăriin vederea identificării)) poate conduce poate conduce la modele matematice la modele matematice inadecvateinadecvate sau sau impreciseimprecise, d, din in cauzăcauză căcă o serie de o serie de caracteristici caracteristici ale acestora ale acestora nu se mai regăsesc nu se mai regăsesc îîn modelele asociaten modelele asociate..
Metode de identificareMetodeMetode de de identificareidentificare
Modele de identificareModeleModele de de identificareidentificare
Semnalede stimulSemnaleSemnalede de stimulstimul
ISIS
Metode de identificareMetodeMetode de de identificareidentificare
Modele de identificareModeleModele de de identificareidentificare
Semnalede stimulSemnaleSemnalede de stimulstimul
ISISISIS
Metode de identificareMetodeMetode de de identificareidentificare
Modele de identificareModeleModele de de identificareidentificare
Semnalede stimulSemnaleSemnalede de stimulstimul
ISIS
Metode de identificareMetodeMetode de de identificareidentificare
Modele de identificareModeleModele de de identificareidentificare
Semnalede stimulSemnaleSemnalede de stimulstimul
ISISISIS
110110
Exemplul 1ExemplulExemplul 11 Pierderea caracteristicilor în domeniul timpului pentruun sistem de ordin I cu constantă de timp parazită
PierdereaPierderea caracteristicilorcaracteristicilor înîn domeniuldomeniul timpuluitimpului pentrupentruun un sistemsistem de de ordinordin I cu I cu constantăconstantă de de timptimp parazităparazită
( )(1 )(1 )
def
p
KH sT s T s
=+ +
pT T<<• Grosso modo, funcGrosso modo, funcţţia de transfer relevă un ia de transfer relevă un comportament comportament similar cu al unui sistem de ordinul Isimilar cu al unui sistem de ordinul I, de, deşşi, i, îîn realitate, ea n realitate, ea descrie un sistem de ordinul IIdescrie un sistem de ordinul II. .
Cum Cum ss--arar puteaputea determinadetermina ceicei 3 3 parametriparametri??
yy
00
~K ~K
~T ~T ttTTpp ??
De De cece ss--a a pierdutpierdut informaţiainformaţia referitoarereferitoarela la constantaconstanta de de timptimp parazităparazită??
EE y[ny[n]]
Deoarece semnalul treaptă unitarănu a stimulat corect sistemul, învederea identificării.
DeoareceDeoarece semnalulsemnalul treaptătreaptă unitarăunitarănunu a a stimulatstimulat corectcorect sistemulsistemul, , îînnvedereavederea identificăriiidentificării. .
Constanta de timp parazită intervine în zona tranzitorie a răspunsului, efectul ei fiind insesizabil.Constanta de timp parazită intervine Constanta de timp parazită intervine îîn zona n zona tranzitorie a răspunsuluitranzitorie a răspunsului, efectul ei fiind insesizabil., efectul ei fiind insesizabil.
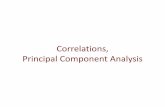
Comportamentul în frecvenţă al intrării, sistemului şi ieşirii poate releva maiuşor fenomenul pierderii de informaţieprin stimularea cu un semnal inadecvat.
CComportamentul omportamentul îîn frecvenn frecvenţţăă al intrării al intrării, , sistemului sistemului şşi iei ieşşiriiirii poatepoate relevareleva maimaiuuşşoror fenomenulfenomenul pierderiipierderii de de informainformaţţieieprinprin stimulareastimularea cu un cu un semnalsemnal inadecvatinadecvat..

11/19
Dacă se doreşte o informaţie consistentă şi în zona constantei parazite, intrarea trebuie să solicite sistemul pe o bandă de frecvenţe mult mai largă decît a treptei unitare.
Dacă se doreDacă se doreşşte o informate o informaţţie consistentă ie consistentă şşi i îîn zona n zona constantei parazite, intrareaconstantei parazite, intrarea trebuie să solicite sistemul pe o trebuie să solicite sistemul pe o bandă de frecvenbandă de frecvenţţe mult mai largăe mult mai largă decdecîît a treptei unitare.t a treptei unitare.
( )( )2 2 2 2
( ) ( ) ( )1 1
1 1
p
p
KY j H j U jj T j T
K
T T
Ω = Ω Ω = =Ω + Ω + Ω
=Ω +Ω +Ω
∀Ω∈R
Tre
apta
unit
ară
Tre
apta
Tre
apta
unit
ară
unit
ară
Informaţia despre constanta de timp principală este mai consistentă decît informaţia despre constanta de timp parazită.IInformanformaţţia despre constanta de timp principală este mai ia despre constanta de timp principală este mai consistentă decconsistentă decîît informat informaţţia despre constanta de timp parazităia despre constanta de timp parazită..
( ) ( ) ( )(1 )(1 )p
KY j H j U jj j T j T
Ω = Ω Ω =Ω + Ω + Ω
Exemplul 1 (final)
ExemplulExemplul 1 1 (final)(final)
Caracterizare în frecvenţăCaracterizareCaracterizare îînn frecvenfrecvenţţăă
( ) ( ) ( )(1 )(1 )p
KY s H s U ss Ts T s
= =+ +
SemnaleSemnale de de stimulstimul
111111
.. NecesitateaNecesitatea stimulăriistimulării corectecorecte a a proceselorproceselor
Pierderea caracteristicilor în domeniul timpului pentruun sistem de ordin I cu constantă de timp parazită
PierdereaPierderea caracteristicilorcaracteristicilor înîn domeniuldomeniul timpuluitimpului pentrupentruun un sistemsistem de de ordinordin I cu I cu constantăconstantă de de timptimp parazităparazită
( )(1 )(1 )
def
p
KH sT s T s
=+ +
TL a răspunsului indicialTL TL a a răspunsuluirăspunsului indicialindicial
s j= Ω|U||U|
00|H||H|
00 ΩΩ
ΩΩ
|Y||Y|
00 ΩΩ22ππ/T/T 22ππ/T/Tpp
Relaţie spectralăRelaRelaţţieie spectralăspectrală
pT T<<2 2
pT Tπ π<<
××
stimularestimulare puternicăputernică îînn zonazonafrecvenfrecvenţţelorelor joasejoase
stimularestimulare slabăslabă îînn zonazonafrecvenfrecvenţţelorelor îînaltenalte1/|1/|ΩΩ||
FTJFTJ

12/19
( )( )( )1 e 1 e p ss
def
s N Ts NT
KH s =+ +
ssTz e=
Tre
apta
unit
ară
Tre
apta
Tre
apta
unit
ară
unit
ară
Exemplul 2ExemplulExemplul 22
Caracterizare în frecvenţăCaracterizareCaracterizare îînn frecvenfrecvenţţăă
SemnaleSemnale de de stimulstimul
112112
.. NecesitateaNecesitatea stimulăriistimulării corectecorecte a a proceselorproceselor
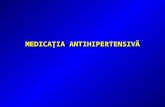
Mascarea caracteristicilor în domeniul frecvenţei pentruun oscilator afectat de o oscilaţie parazită
MascareaMascarea caracteristicilorcaracteristicilor înîn domeniuldomeniul frecvenţeifrecvenţei pentrupentruun un oscilatoroscilator afectatafectat de o de o oscilaţieoscilaţie parazităparazită ( )( )( )
1 1 p
def
NN
KH zz z
=+ +
|U||U|
00|H||H|
00 ΩΩ
ΩΩ
|Y||Y|
00 ΩΩππ/T/T ππ/T/Tpp
pT T<<pT T
π π<<
××
stimularestimulare puternicăputernică îînn zonazonafrecvenfrecvenţţelorelor joasejoase
stimularestimulare slabăslabă îînn zonazonafrecvenfrecvenţţelorelor îînaltenalte1/|1/|ΩΩ||
periodicăperiodică
pN N<<perioadăperioadă proprieproprie de de oscilaoscilaţţieie
perioadăperioadă parazităparazită de de oscilaoscilaţţieie
• Se Se considerăconsideră căcă sistemulsistemul discretdiscret provineprovine de de la un la un sistemsistem continuucontinuu prinprin discretizarediscretizare idealăidealăcu ocu o perioadăperioadă de de eeşşantionareantionare prestabilităprestabilită..
pTTs j= Ω
[ ]( ) ( ) ( )
2 1 cos( ) 1 cos( )
4 cos cos2 2
p
p
KY j H j U jT T
KTT
Ω = Ω Ω = =⎡ ⎤Ω + Ω + Ω⎣ ⎦
=Ω⎛ ⎞Ω⎛ ⎞Ω ⋅ ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Stimulare cu o treaptă unitarăStimulareStimulare cu o cu o treaptătreaptă unitarăunitară
Relaţie spectralăRelaRelaţţieie spectralăspectrală∀Ω∈R
Chiar dacă treapta unitară este fundamentală înTS, în cadrul IS, ea joacă doar un rol secundar (ajută la determinarea timpului mort).
CChiar dacă hiar dacă treapta unitarătreapta unitară este este fundamentalfundamentalăă îînnTSTS, , îîn cadrul n cadrul ISIS, e, ea joacă doar un a joacă doar un rol secundar rol secundar (aju(ajută la determinarea timpului mortă la determinarea timpului mortt).).
proprieproprieparazităparazită

13/19
Exemplul 3ExemplulExemplul 33
SemnaleSemnale de de stimulstimul
113113
.. NecesitateaNecesitatea stimulăriistimulării corectecorecte a a proceselorproceselor
Stimularea empirică a unui FTJ cu armonice elementare izolateStimulareaStimularea empiricăempirică a a unuiunui FTJFTJ cu cu armonicearmonice elementareelementare izolateizolate
Prin stimularea cu armonice elementare de diferite pulsaţii/frecvenţe. PrinPrin stimulareastimularea cu cu armonicearmonice elementareelementare de de diferitediferite pulsaţii/frecvenţepulsaţii/frecvenţe. .
Cum Cum ss--arar puteaputea determinadetermina pulsaţia/frecvenţapulsaţia/frecvenţa de de tăieretăiere a a filtruluifiltrului??
FTJFTJ
|H|uu yy
ωωcc
FTJFTJ
|H|uu yy
ωωcc
FTJFTJ
|H|uu yyFTJFTJ
|H|uu yy
u cω << ω u cω < ω
u cω ≈ ω
++u cω > ω
Nivelul de zgomot creşte pemăsură ce pulsaţia intrării se apropie de cea de tăiere.
NivelulNivelul de de zgomotzgomot crecreşştete pepemăsurămăsură cece pulsapulsaţţiaia intrăriiintrării se se apropieapropie de de ceacea de de tăieretăiere..
Empiric şiineficient!Empiric Empiric şşiiineficientineficient!!
ωωcc ωωcc

14/19
Ordinul de persistenţă indicănumărul de valori identificabileale secvenţei pondere a unuisistem liniar discret cauzal şistabil asociat procesuluifurnizor de date.
OrdinulOrdinul de de persistenpersistenţţăă indicăindicănumărulnumărul de de valorivalori identificabileidentificabileale ale secvensecvenţţeiei ponderepondere a a unuiunuisistemsistem liniarliniar discretdiscret cauzalcauzal şşiistabilstabil asociatasociat procesuluiprocesuluifurnizorfurnizor de datede date..
SemnaleSemnale de de stimulstimul. Conceptul de persistenţă.. ConceptulConceptul de de persistenpersistenţţăă
114114
Semnal persistent de ordin M
SemnalSemnal persistent persistent de de ordinordin MM
[0] [1] [2] [ 1][1] [0] [1] [ 2]
( ) 0[ 2] [1] [0] [1][ 1] [2] [1] [0]
u u u u
u u u udef
M
u u u u
u u u u
r r r r Mr r r r M
ur M r r rr M r r r
−⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥= >⎢ ⎥−⎢ ⎥⎢ ⎥−⎣ ⎦
R
Matricea de auto-covarianţăMatriceaMatricea de autode auto--covarianţăcovarianţă Inversabilă.InversabilăInversabilă..
MatriceToeplitzMatriceMatriceToeplitzToeplitz
simetricăsimetricăsimetrică
Sistemul Wiener-HopfSistemulSistemul WienerWiener--HopfHopf SoluSoluţţiaia sistemuluisistemului WienerWiener--HopfHopf
( ) ( , )M Mu y u=R θ r 1ˆ ( ) ( , ) MM M Mu y u−= ∈θ R r R
AşadarAşadarAşadar Cu cît ordinul de persistenţă al semnalului de stimul este mai mare, cu atît secvenţa pondere este mai bine determinată (adică pe un orizont mai mare de timp).Cu cCu cîît ordinul de persistent ordinul de persistenţţă al semnalului de stimul este mai mareă al semnalului de stimul este mai mare, cu at, cu atîît secvent secvenţţa a pondere este mai bine determinată pondere este mai bine determinată (adi(adică pe un orizont mai mare de timpcă pe un orizont mai mare de timp).).
Modelul de identificare este cu atît mai precis cu cît semnalul de stimul este mai persistent.MModelul de identificare este odelul de identificare este cu atcu atîît mai precis t mai precis cu ccu cîît semnalul de stimul t semnalul de stimul esteeste maimai persistenpersistentt..
[ ]MSp ClasaClasa semnalelorsemnalelorpersistentepersistente de de ordinordin MM..

15/19
Folosind proprietăţile operatorului de medierestatistică şi ale densităţii spectrale de putere.
FolosindFolosind proprietăproprietăţileţile operatoruluioperatorului de de medieremedierestatisticăstatistică şişi ale ale densitădensităţiiţii spectralespectrale de de putereputere..
SemnaleSemnale de de stimulstimul
115115
.. ConceptulConceptul de de persistenţăpersistenţă
Care Care esteeste caracterizareacaracterizarea înîn frecvenţăfrecvenţă a a unuiunuisemnalsemnal persistent de persistent de ordinordin M?M?
ExerciţiuExerciţiuExerciţiu • TreaptaTreapta unitarăunitară ((discretădiscretă)) (ca (ca şşii oriceorice semnalsemnal constant) constant) esteeste un un semnalsemnal persistent de persistent de ordinordin 11. . Treapta unitară permite
identificarea unei singurevalori a secvenţei pondere.
TreaptaTreapta unitarăunitară permitepermiteidentificareaidentificarea uneiunei singuresingurevalorivalori a a secvensecvenţţeiei ponderepondere..
Propoziţia 3PropoziPropoziţţiaia 33
Un semnal discret este persistent de ordin M dacă şi numai dacă densitateasa spectrală de putere posedă cel puţin M linii spectrale nenule.Un Un semnalsemnal discretdiscret esteeste persistent de persistent de ordinordin M M dacădacă şşii numainumai dacădacă densitateadensitateasasa spectralăspectrală de de putereputere posedăposedă celcel pupuţţinin M M liniilinii spectralespectrale nenulenenule..
DemonstraţieDemonstraDemonstraţţieie
Cum Cum poatepoate fifi exprimatăexprimată definiţiadefiniţiaoriginalăoriginală a a persistenţeipersistenţei înîn domeniuldomeniul
frecvenţeifrecvenţei??
[0] [1] [2] [ 1][1] [0] [1] [ 2]
( )[ 2] [1] [0] [1][ 1] [2] [1] [0]
u u u u
u u u udef
M
u u u u
u u u u
r r r r Mr r r r M
ur M r r rr M r r r
−⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥=⎢ ⎥−⎢ ⎥⎢ ⎥−⎣ ⎦
R
[ ] [ ] [ ]def
ur k E u n u n k= −
[ ][ 1]
( ) [ 1] [ ][ ]
M
u nu E u n u n M
u n M
−⎧ ⎫⎡ ⎤⎪ ⎪⎢ ⎥= − −⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥−⎣ ⎦⎩ ⎭
R

16/19
( ) ( )( 1)1 2
1
e e e e eM
j j m j j j Mm M
m
X x x x xω − ω − ω − ω − ω −
=
= = + + +∑
SemnaleSemnale de de stimulstimul
116116
.. ConceptulConceptul de de persistenţăpersistenţăDemonstraţie (Propoziţia 3)DemonstraDemonstraţţieie ((PropoziPropoziţţiaia 3)3)
ExpresiaExpresia matriciimatricii de autode auto--covarianţăcovarianţă simplificăsimplifică exprimareaexprimarea formeiformei pătraticepătratice asociateasociate..•AstfelAstfel, , pentrupentru oriceorice vector determinist vector determinist • 1[ ]T M
Mx x= ∈x R rezultărezultă: :
[ ][ 1]
( ) [ 1] [ ][ ]
T TM
u nu E u n u n M
u n M
−⎧ ⎫⎡ ⎤⎪ ⎪⎢ ⎥= − −⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥−⎣ ⎦⎩ ⎭
x R x x x ( ) 21 [ 1] [ ]ME x u n x u n M= − + + − 0.≥
Aşadar, matricea de auto-covarianţăeste şi pozitiv (semi-)definită.
AAşşadaradar, , matriceamatricea de autode auto--covariancovarianţţăăesteeste şşii pozitivpozitiv (semi(semi--))definitădefinită..InterpretareInterpretare: forma : forma pătraticăpătratică se se exprimăexprimă ca ca dispersiadispersia
unuiunui semnalsemnal obţinutobţinut la la ieşireaieşirea unuiunui sistemsistem de tip de tip FIRFIR. . •
SistemSistem liniarliniar FIRFIRhuu y y ≡≡ hh∗∗uu
[0] 0h =
1[1]h x=
2[2]h x=
[ ] Mh M x=
1
[ ] [ ] [ ]M
m
y n h m u n m=
= −∑ , .n∀ ∈N1
[ ]M
mm
x u n m=
= −∑ 2 2[ ]y E y nσ = ( ) 2
1 [ 1] [ ]ME x u n x u n M= − + + −
DispersiaDispersia se se obţineobţine însăînsă şişi folosindfolosind densitateadensitatea spectralăspectralăa a ieşiriiieşirii sistemuluisistemului: :
•
2 1[0] ( )2y y yr d
+π
−π
σ = = φ ω ωπ ∫
TransferulTransferul densitădensităţiiţii spectralespectraleprinprin sistemesisteme liniareliniare
( )1 e ( ) .2
juX d
+π 2ω
−π
= φ ω ωπ ∫( ) ( )1 1
1
Mm
mm
H q X q
x q
− −
−
=
= =
=∑funcfuncţţiaia
de de sistemsistem∀ω∈R
răspunsulrăspunsul îînnfrecvenfrecvenţţăă
Polinom de grad (M-1) PolinomPolinom de grad de grad ((MM--1) 1)

17/19SemnaleSemnale de de stimulstimul
117117
.. ConceptulConceptul de de persistenţăpersistenţăDemonstraţie (Propoziţia 3)DemonstraDemonstraţţieie ((PropoziPropoziţţiaia 3)3)
semnalulsemnalul esteestepersistent de persistent de ordinordin MM
( ) 0TM u = ⇒ =x R x x 0
AşadarAşadarAşadar1( ) (e ) ( )2
T jM uu X d
+π2ω
−π
= φ ω ωπ ∫x R x
Ecuaţie care arată cum se transferăinformaţia despre persistenţădin timp în frecvenţă şi reciproc.
EcuaEcuaţţieie care care aratăarată cum se cum se transferătransferăinformainformaţţiaia despredespre persistenpersistenţţăădin din timptimp îînn frecvenfrecvenţţăă şşii reciprocreciproc..
dacădacă şişi numainumai dacădacă (e ) ( ) 0juX
2ω φ ω =∀ω∈R
Semnalul discret este persistent de ordin M.
SemnalulSemnalul discretdiscret esteeste persistent persistent de de ordinordin M.M.
Densitatea sa spectrală de putere posedăcel puţin M linii spectrale nenule.
DensitateaDensitatea sasa spectralăspectrală de de putereputere posedăposedăcelcel pupuţţinin M M liniilinii spectralespectrale nenulenenule..
RaţionamentRaţionament de tip de tip reducerereducere la absurdla absurd..•SeSe presupune presupune, p, prin absurd, rin absurd, că că densitatea spectrală este nenulă densitatea spectrală este nenulă îîntrntr--un un număr de pulsanumăr de pulsaţţii mai mic decii mai mic decîîtt MM..
•∃ m M< & 1, i i m∈
ω : ( ) 0u iφ ω > , 1, .i m∀ ∈((înîn rest, rest, densitateadensitatea spectralăspectrală esteeste nulănulă))
SSe va construi un vector nenule va construi un vector nenul• M∈x R pentrupentru carecare ( ) 0TM u =x R x
(forma (forma pătraticăpătratică esteestenedegeneratănedegenerată))
ipoteza de la care sipoteza de la care s--a plecat.a plecat., ceea ce contrazice, ceea ce contrazice
VectorulVectorul căutatcăutat esteeste format din format din coeficiencoeficienţţiiii următoruluiurmătorului ““polinompolinom frecvenfrecvenţţialial””, , ale ale căruicărui rădăcinirădăcini suntsunt chiarchiar pulsapulsaţţiileiile
•
( ) ( )1 ( )( )0(e ) e 1 e 1 e (e )m
defjjj j jX X− ω−ω− ω−ωω − ω ω= − ⋅ ⋅ −
1, i i m∈ω :: polinompolinom de de completarecompletare pînăpînă la la
gradulgradul MM
Polinom de grad mPolinomPolinom de grad de grad mm0 (e ) 0ijX ω ≠
1,i m∀ ∈
, .∀ω∈R

18/19
0X ≡
Densitatea sa spectrală de putere posedăcel puţin M linii spectrale nenule.
DensitateaDensitatea sasa spectralăspectrală de de putereputere posedăposedăcelcel pupuţţinin M M liniilinii spectralespectrale nenulenenule..
SemnaleSemnale de de stimulstimul
118118
.. ConceptulConceptul de de persistenţăpersistenţăDemonstraţie (Propoziţia 3)DemonstraDemonstraţţieie ((PropoziPropoziţţiaia 3)3)
Absurd.Absurd.Absurd.
PolinomulPolinomul frecvenfrecvenţţialial nefiindnefiind identicidentic nulnul, , celcel pupuţţinin un un coeficientcoeficient esteeste nenulnenul, , astfelastfel căcăvectorulvectorul coeficiencoeficienţţilorilor esteeste nenulnenul. .
•1( ) (e ) ( )2
T jM uu X d
+π2ω
−π
= φ ω ωπ ∫x R x
1, i i m∈ω∈ ωpentrupentru
Mai Mai multmult: : • 0.=
0
1, i i m∈ω∉ ωpentrupentru
0
Semnalul discret este persistent de ordin M.
SemnalulSemnalul discretdiscret esteeste persistent persistent de de ordinordin M.M.
Să presupunem că setul de pulsaSă presupunem că setul de pulsaţţii pentru care densitatea spectrală ii pentru care densitatea spectrală nu se anuleazănu se anuleazăesteeste
•m M≥1, i i m∈
ω , cu , cu . . ( ) 0u iφ ω > , 1, .i m∀ ∈AstfelAstfel::
Pentru a testa persistenţa de ordin Pentru a testa persistenţa de ordin MM a semnalului a semnalului, t, trebuie rezolvată ecuarebuie rezolvată ecuaţia:ţia:•1( ) (e ) ( ) 02
T jM uu X d
+π2ω
−π
= φ ω ω =π ∫x R x
necunoscutanecunoscuta ecuaţieiecuaţiei
⇔ e (e ) 0j jXω ω = 1,, i i m∈∀ω∈ ω
0≥ Polinom de grad (M-1) cu m>M-1 rădăcini.
PolinomPolinom de grad de grad ((MM--1) 1) cu cu mm>>MM--11 rădăcinirădăcini..
AşadarAşadar, , unicaunica solusoluţţieie a ecuaţia ecuaţieiei esteeste ceacea nulănulă..•
( ) 0M u >R

19/19SemnaleSemnale de de stimulstimul. Proprietăţi ale semnalelor persistente.. ProprietăProprietăţţii ale ale semnalelorsemnalelor persistentepersistente
119119
Tq1 Imbricarea claselor de semnale persistenteTqTq1 1 ImbricareaImbricarea claselorclaselor de de semnalesemnale persistentepersistente
Dacă un semnal este persistent de ordin M, atunci este persistent şi de ordin m, cu m≤M.Dacă un semnal este persistent de ordin Dacă un semnal este persistent de ordin MM, atunci este persistent , atunci este persistent şşi de ordin i de ordin mm, , cu cu mm≤≤MM..
[1] [2] [ ] [ ] [ ]m M⊃ ⊃ ⊃ ⊃ ⊃ ⊃ ⊃ ∞Sp Sp Sp Sp Sp
ExerciţiuExerciţiuExerciţiu
Tq2 Persistenţa unui semnal periodicTqTq2 2 PersistenPersistenţţaa unuiunui semnalsemnal periodicperiodic
Dacă un semnal este periodic de perioadă P, atunci ordinul său de persistenţăeste cel mult egal cu perioada.Dacă un semnal este Dacă un semnal este periodic de periodic de perioadăperioadă PP, atunci , atunci ordinulordinul săusău de de persistenpersistenţţăăesteeste celcel multmult egalegal cu cu perioadaperioada..
ExerciţiuExerciţiuExerciţiu
Tq3 Conservarea persistenţei la ieşirea procesului furnizor de dateTqTq3 3 ConservareaConservarea persistenpersistenţţeiei la la ieieşşireairea procesuluiprocesului furnizorfurnizor de datede date
Fie Fie
ExerciţiuExerciţiuExerciţiu
[ ]u M∈Sp un semnal care stimulează un procesun semnal care stimulează un proces/sistem /sistem cu următoareacu următoareaproprietate: funcproprietate: funcţţia sa de sistem ia sa de sistem 1( )H q− nu are zerouri pe cercul unitar.
semnalul de ieşire semnalul de ieşire yy are proprietatea de a conserva ordinul de persistenţă al are proprietatea de a conserva ordinul de persistenţă al intrăriiintrării::
Atunci
[ ]y M∈Sp ..
Tq4 Cazuri de stimulare nedorite în ISTqTq4 4 CazuriCazuri de de stimularestimulare nedoritenedorite îînn ISIS
Fie un sistem de tip FIR cu secvenţa pondere
ExerciţiuExerciţiuExerciţiu
1, [ ]m Mh m∈
cu un semnal cu un semnal uu şi se obţine semnalul de ieşire şi se obţine semnalul de ieşire yy.... Se stimulează sistemulSe stimulează sistemul
a.a. DacăDacă [ ]u M∈Sp şşii totuşitotuşi 0y ≡ , , atunciatunci 0h ≡ ..b.b. DacăDacă [ ]u m∈Sp , cu, cu m M< , , atunciatunci se se poatepoate construiconstrui o o secvenţăsecvenţă
0y ≡ ..ponderepondere nebanalănebanală hh, de , de dimensiunedimensiune M, M, astfelastfel încîtîncît
Experimentul de identificare poate eşua din cauza stimulării inadecvate a procesului.
ExperimentulExperimentul de de identificareidentificare poatepoate eeşşuaua din din cauzacauza stimulăriistimulării inadecvateinadecvate a a procesuluiprocesului..