010 141010.141 MODULE 2: Matrix Eigenvalue...
43
ENGINEERING MATHEMATICS II ENGINEERING MATHEMATICS II 010 141 010.141 MODULE 2: Matrix Eigenvalue Problem Problem
Transcript of 010 141010.141 MODULE 2: Matrix Eigenvalue...
ENGINEERING MATHEMATICS IIENGINEERING MATHEMATICS II
010 141010.141
MODULE 2: Matrix Eigenvalue ProblemProblem
EIGENVALUES AND EIGENVECTORSEIGENVALUES AND EIGENVECTORS
2B.D. Youn2010 Engineering Mathematics II Module 2
SOME DEFINITIONS
Let A be an n × n matrix and consider
Ax = λx (1)
λ, such that (1) has solution x ≠ 0 is an eigenvalue or h t i ti l f Acharacteristic value of A.
x are eigenvectors or characteristic vectors of A.
The spectrum of A is the set of eigenvalues of A;
max| λ | is the spectral radius of A.
The set of eigenvectors corresponding to λ (including 0) is the eigenspace of A for λ.
3B.D. Youn2010 Engineering Mathematics II Module 2
SOME DEFINITIONS (cont)
li iHomogeneous linear system in x1, x2
⏐→ Cramer's theorem
D(λ) = det(A-λI) = 0
D(λ) is the characteristic determinant andD(λ) is the characteristic determinant, and
D(λ) = 0 is the characteristic equation
4B.D. Youn2010 Engineering Mathematics II Module 2
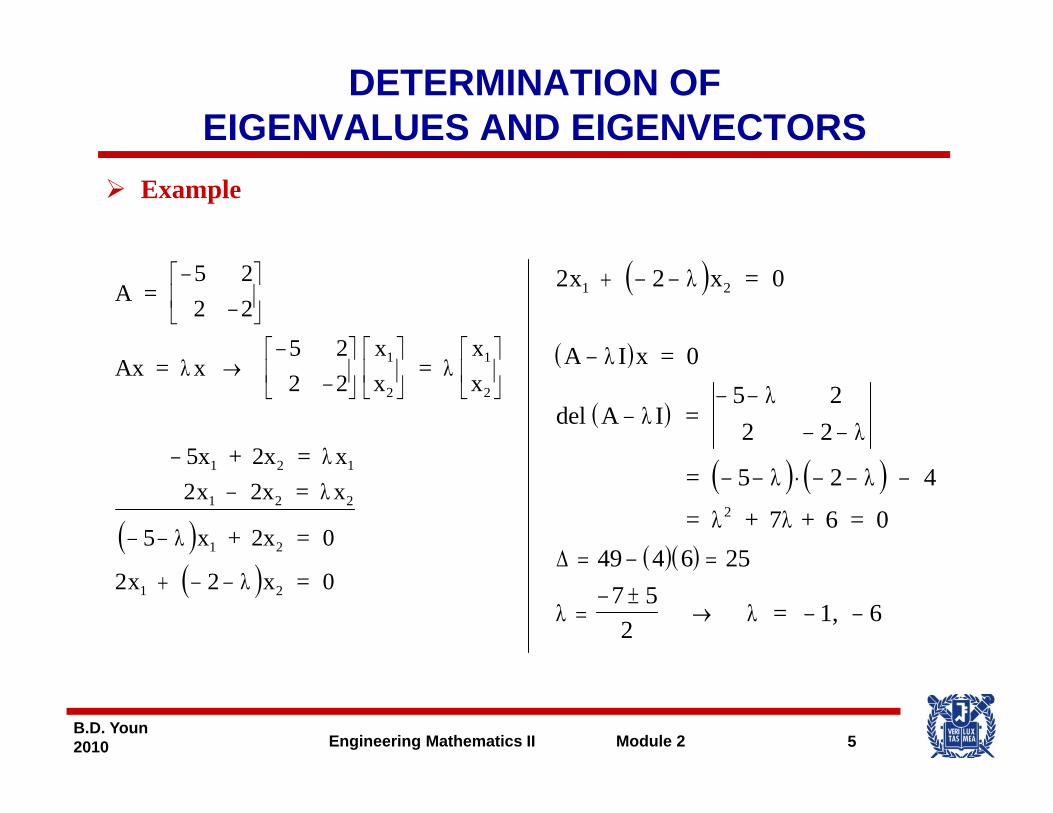
DETERMINATION OF EIGENVALUES AND EIGENVECTORS
Example
A
x x
= 5
2
5
−−
⎡
⎣⎢
⎤
⎦⎥
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤
22
2 1 1
( )
( )
2 0x 2 x =
A = 0
1 2+ − − λ
λ I xAx xx
xx= x
5 2 =
5x + 2x = x
→−
⎡
⎣⎢
⎤
⎦⎥⎡
⎣⎢
⎤
⎦⎥
⎡
⎣⎢
⎤
⎦⎥
−
22
1
2
1
2λ λ
λ
( )
( )2
2
A = 0
del A = 5
2
−
−− −
− −
λ
λλ
λ
I x
I
( )
5x + 2x = x x 2x = x
5 x + 2x =
1 2 1
1 2 2
1 2
−−
− −
2
0
λλ
λ
( ) ( )
( )( )
2
49 4 6 25
= 5 4
= + 7 + 6 = 02
− − ⋅ − − −
= − =
λ λ
λ λ
Δ( )x 2 x = 1 2+ − −2 0λ
( )( )49 4 6 257 52
= 1, 6
= − =
=− ±
→ − −λ λ
Δ
5B.D. Youn2010 Engineering Mathematics II Module 2
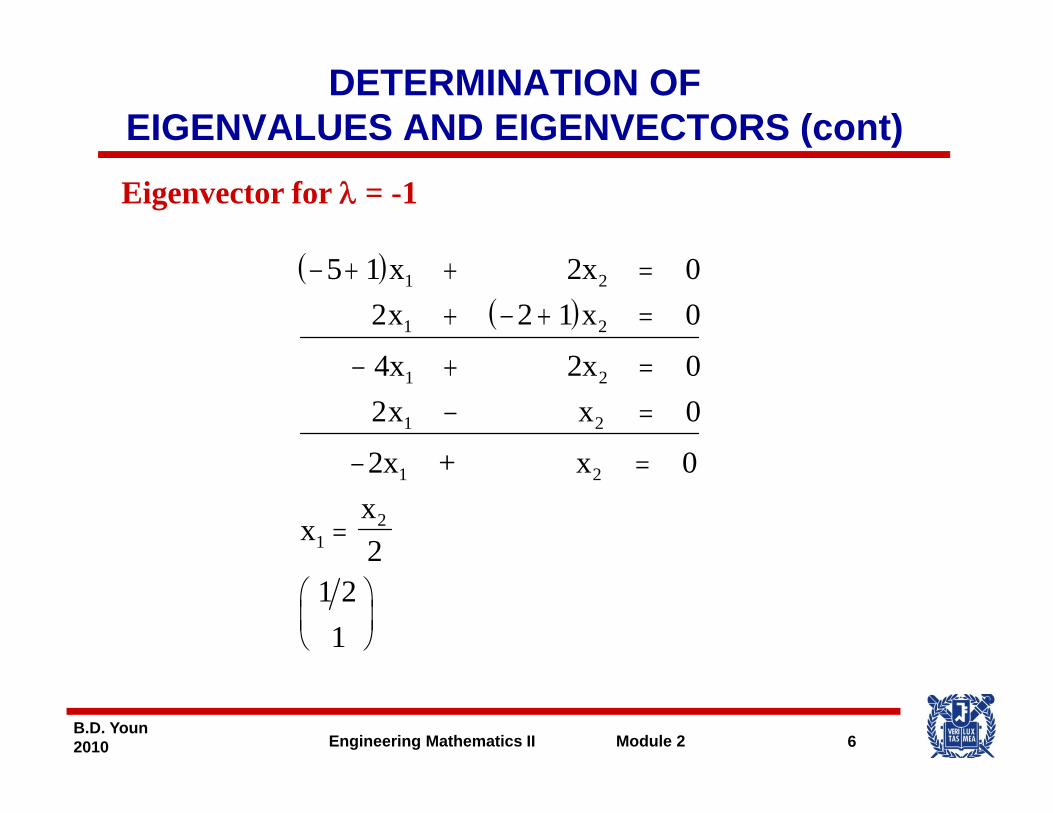
DETERMINATION OF EIGENVALUES AND EIGENVECTORS (cont)Eigenvector for λ = -1
( )( )
− + + =+ − + =
5 x 2x x x
4 2
1 2
1 2
1 02 2 1 0
0− + =− =
4x 2x x x
2 +
1 2
1 2
02 0
0− =
=
2x + x
xx
1 2
12
0
2⎛⎝⎜
⎞⎠⎟
21 21
6B.D. Youn2010 Engineering Mathematics II Module 2
DETERMINATION OF EIGENVALUES AND EIGENVECTORS (cont)
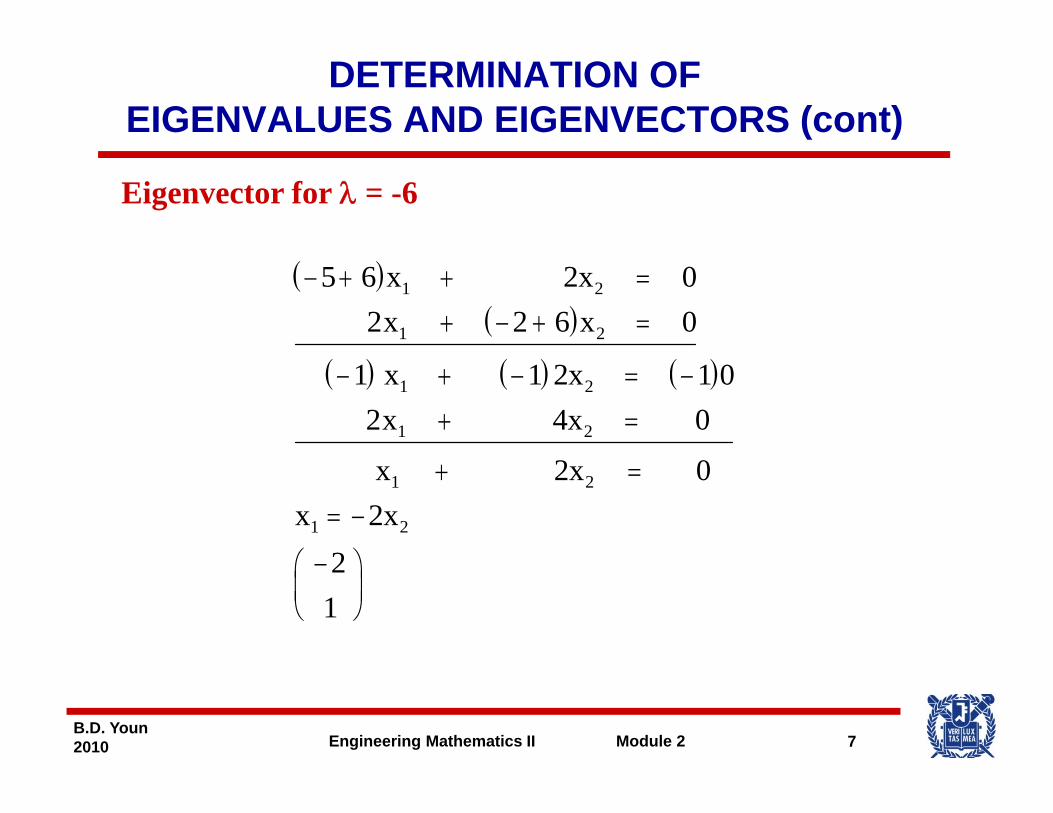
Eigenvector for λ = -6
( )( )
− + + =+ − + =
5 x 2x x x
1 2
1 2
6 02 2 6 0
( ) ( ) ( )− + − = −+ =
x 2x x 4x
1 2
1 2
1 1 1 02 0
+ == −
⎛ ⎞
x 2xx 2x
1 2
1 2
0
2−⎛⎝⎜
⎞⎠⎟
21
7B.D. Youn2010 Engineering Mathematics II Module 2
EIGENVALUES
The eigenvalues of a square matrix A are the roots of theThe eigenvalues of a square matrix A are the roots of the characteristic equation
D(λ) = 0
An n × n matrix has at least one eigenvalue and at most n different eigenvaluesn different eigenvalues
8B.D. Youn2010 Engineering Mathematics II Module 2
EIGENVECTORS
If x is an eigenvector of a matrix A corresponding to anIf x is an eigenvector of a matrix A corresponding to an eigenvalue λ, so is kx with any k ≠ 0.
P fProof:Ax = λx
k(Ax) = kλxk(Ax) kλxA(kx) = λ(kx)
9B.D. Youn2010 Engineering Mathematics II Module 2
PROBLEM
Find the eigenvalues and eigenvectors for
⎥⎥⎤
⎢⎢⎡
−−−
= 61232 2
A⎥⎥⎦⎢
⎢⎣ −− 0 21
61 2 A
10B.D. Youn2010 Engineering Mathematics II Module 2
MULTIPLICITY
The algebraic multiplicity is the order Mλ of λ in the characteristic polynomialcharacteristic polynomial.
The geometric multiplicity of λ is the number of linearly independent vectors corresponding to λ. (mλ).
∑M
≤
=
λλ
λ∑Mm
nM
12
( )λ−=Δ λλλ ofdefect mM
11B.D. Youn2010 Engineering Mathematics II Module 2
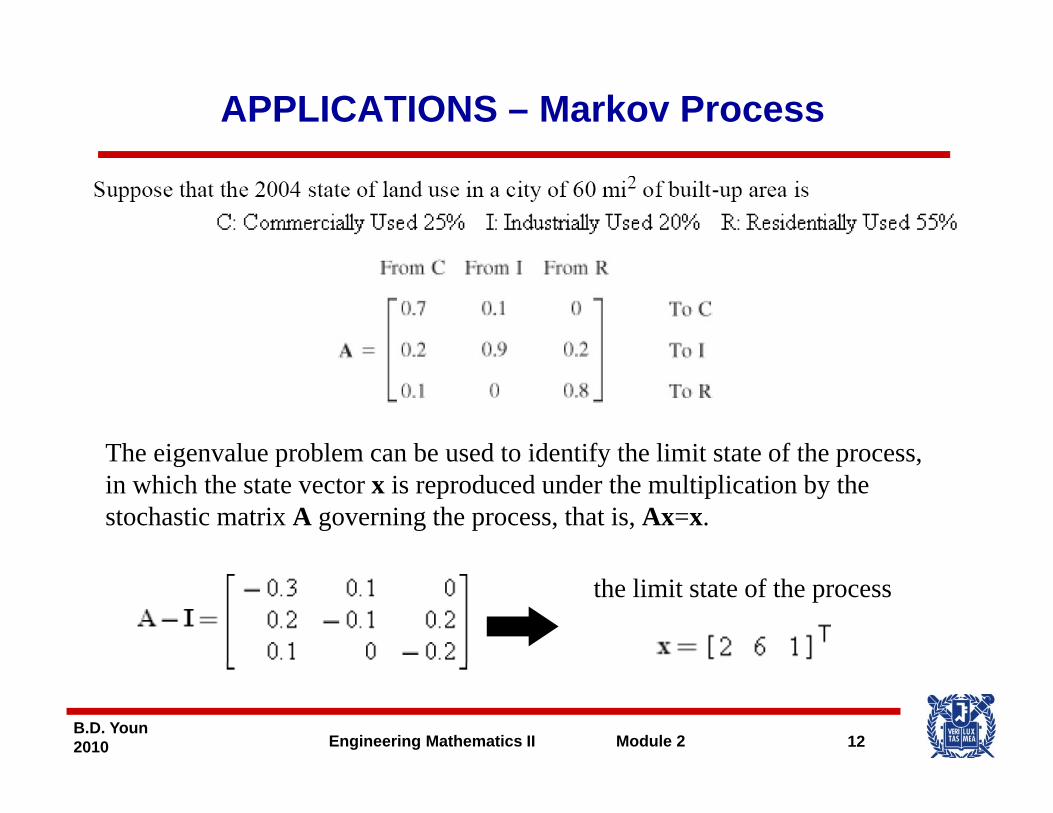
APPLICATIONS – Markov Process
The eigenvalue problem can be used to identify the limit state of the processThe eigenvalue problem can be used to identify the limit state of the process, in which the state vector x is reproduced under the multiplication by the stochastic matrix A governing the process, that is, Ax=x.
the limit state of the process
12B.D. Youn2010 Engineering Mathematics II Module 2
APPLICATIONS
A limit is reached if x = ATx
• AT should have eigenvalue 1
A and AT have same eigenvalueA and AT have same eigenvalue
• A should have eigenvalue 1
We can show VT = [1 1 1]T is an eigenvector corresponding to λ = 1
13B.D. Youn2010 Engineering Mathematics II Module 2
SYMMETRIC, SKEW SYMMETRIC, ORTHOGONAL MATRIES
Definitions
A real square matric n×n
• is symmetric if AT = A• is skew-symmetric if AT = -A• is orthogonal if AT = A-1g• Any real square matrix A
( )TAA1SRA +=
( )( )T
T
AA21S
AA21R
−=
+=
• The eigenvalues of a symmetric matrix are real• The eigenvalues of a skew-symmetric matrix are pure imaginary
or 0.
2
14B.D. Youn2010 Engineering Mathematics II Module 2
or 0.(Proof Later).
ORTHOGONALTRANSFORMATIONS AND MATRIES
Y = Ax, A is orthogonal
Example: Plane rotation through θ.
⎤⎡⎤⎡ θ−θ⎤⎡ 11 xsincosy⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡θθθθ
=⎥⎦
⎤⎢⎣
⎡=
2
1
2
1
xx
cossinsincos
yy
y
• An orthogonal transformation preserves the value of the inner-product of vectors
a b = aTba⋅b = aTb(a, b are column vectors)
15B.D. Youn2010 Engineering Mathematics II Module 2
ORTHOGONALTRANSFORMATIONS AND MATRIES (cont)
Hence, it also preserves the length or norm of a vector:
T
Proof:
aaaaa T ⋅=⋅=
u = Aa A, orthogonalv = Ab
W d hWe need to show u⋅v = a⋅b
( ) AaAau TTTT ==
AbAaAbAavuvu
IAAAA1TTTT
1T
===⋅
==−
−
16B.D. Youn2010 Engineering Mathematics II Module 2
babaT ⋅==
ORTHONORMALITY OFCOLUMN AND ROW VECTORS
A real square matrix is orthogonal iff its column vectors a1, …, an (and also its row vectors) form an orthonormal system
⎩⎨⎧
=≠
=⋅=⋅k j if1k j if0
aaaa kTjkj
17B.D. Youn2010 Engineering Mathematics II Module 2
ORTHONORMALITY OFCOLUMN AND ROW VECTORS
Proof: A is orthogonal
a
IAAAAT1
T1
⎥⎤
⎢⎡
==−
[ ]aaan1
T
T2
1
⎥⎥⎥⎥
⎢⎢⎢⎢
=
aaaaaa
a
nT12
T11
T1
Tn
⎥⎤
⎢⎡
⎥⎥⎦⎢
⎢⎣
aaaaaa nTn2
Tn1
Tn
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
18B.D. Youn2010 Engineering Mathematics II Module 2
I=
DETERMINANT OF AN ORTHOGONAL MATRIX
The determinant of an orthogonal matrix is +1 or -1
Proof:
( ) ( ) BdetAdetABdetBAdet ⋅=⋅=⋅( ) ( )( )
( )AAdet1AdetAdet
BdetAdetABdetBAdet
1
T
⋅==
−( )( )
AdetAdetAAdetAAdet1
T
T
⋅=⋅=
( )1Adet
Adet 2
±==
19B.D. Youn2010 Engineering Mathematics II Module 2
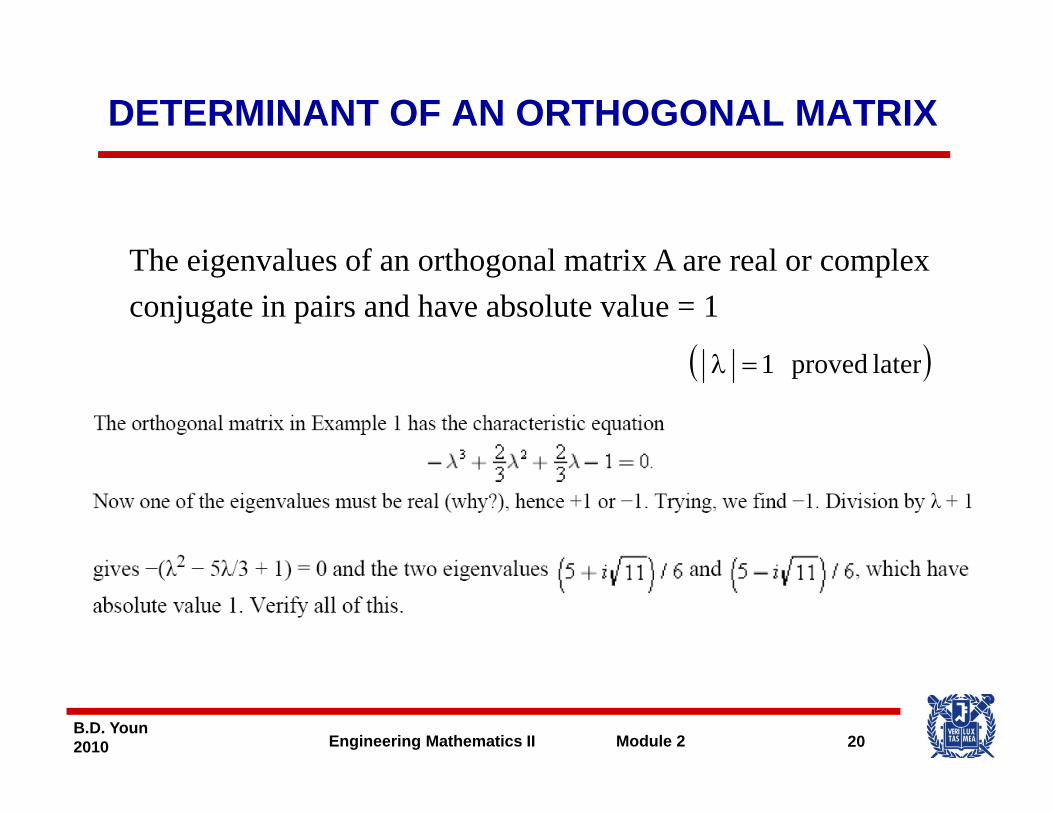
DETERMINANT OF AN ORTHOGONAL MATRIX
Th i l f th l t i A l lThe eigenvalues of an orthogonal matrix A are real or complex conjugate in pairs and have absolute value = 1
( )ld1λ( )laterproved 1=λ
20B.D. Youn2010 Engineering Mathematics II Module 2
COMPLEX MATRICES: HERMITIAN, SKEW-HERMITIAN, UNITARY
Definitions:Definitions:A square matrix A = [ajk] is
•
• T
T
AA if HermitianSkew
AA if Hermitian
−=−
= Symmetric
Skew-symmetric
• 1T AA if Unitary −= Orthogonal
21B.D. Youn2010 Engineering Mathematics II Module 2
COMPLEX MATRICES: HERMITIAN, SKEW-HERMITIAN, UNITARY (cont)
•
( )
realareelementsdiagonalaaermitianhisAIf →
•• t iAAAlit ih itiIf
imaginary pure are elements diagonal a a hermitian- skew isA If
realare elementsdiagonal aa ermitianh isA If
TT
jjjj
jjjj
→
→−=
→=
••• orthogonalAAAnitaryuandrealismatrixaIf
symmetric-skew AAA real ismatrix hermitian-skew a If
symmetric AAA realismatrix hermitian a If
1TT
TT
TT
→
→−==
→==
−• orthogonal AAA ,nitaryuand real ismatrix a If →==
22B.D. Youn2010 Engineering Mathematics II Module 2
EIGENVALUES
Theorem:
• The eigenvalues of a Hermitian matrix are real.
• The eigenvalues of a skew Hermitian matrix are• The eigenvalues of a skew-Hermitian matrix are pure imaginary or 0.
• The eigenvalues of a unitary matrix have absoluteThe eigenvalues of a unitary matrix have absolute value of "1".
23B.D. Youn2010 Engineering Mathematics II Module 2
EIGENVALUES (cont)
Proof: Let λ be an eigenvalue of A, x be a corresponding eigenvector.
Ax = λx
(a) Assume A is Hermitian
xxxxxAxx
1
TTT
⎥⎤
⎢⎡
λ=λ=
[ ]
x
xxxxxx
n
2n21
T
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
=
xx
xxxx2
n2
1
nn11
n
++=
++=⎦⎣
24B.D. Youn2010 Engineering Mathematics II Module 2
0x since 0 ≠≠
EIGENVALUES (cont)
T
T
xxAxx =λ
T real is Axx if real is
xx
λ
( )TT
TT
number
T AxxAxx =
TT
TT
AxxxAx
xAx
⎟⎠⎞⎜
⎝⎛==
=
TT A Aor AA :Hermitian ==
⎠⎝
25B.D. Youn2010 Engineering Mathematics II Module 2
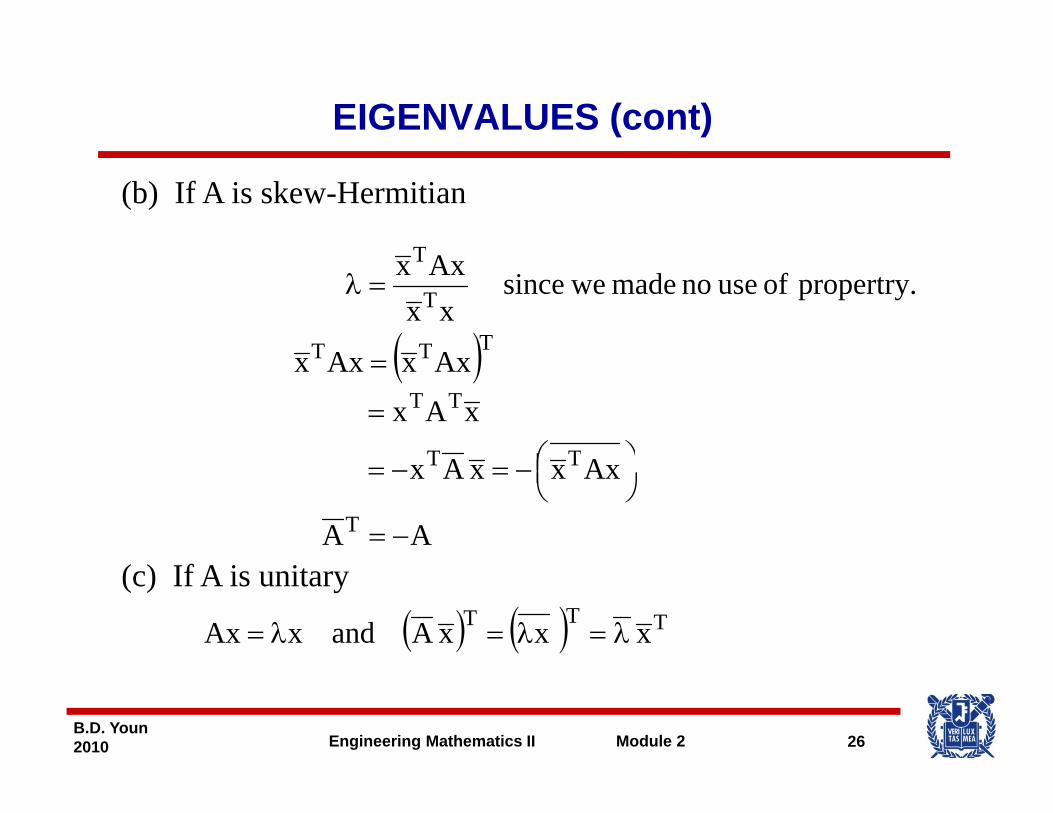
EIGENVALUES (cont)
T
(b) If A is skew-Hermitian
( )TTT
T
T
AA
propertry. of use no made wesince xx
Axx =λ
( )
TT
TT
TT
xAx
AxxAxx
⎟⎞⎜⎛
=
=
T
TT
AA
AxxxAx
−=
⎟⎠⎞⎜
⎝⎛−=−=
( ) ( ) TTT x xxA and xAx λ=λ=λ=
(c) If A is unitary
26B.D. Youn2010 Engineering Mathematics II Module 2
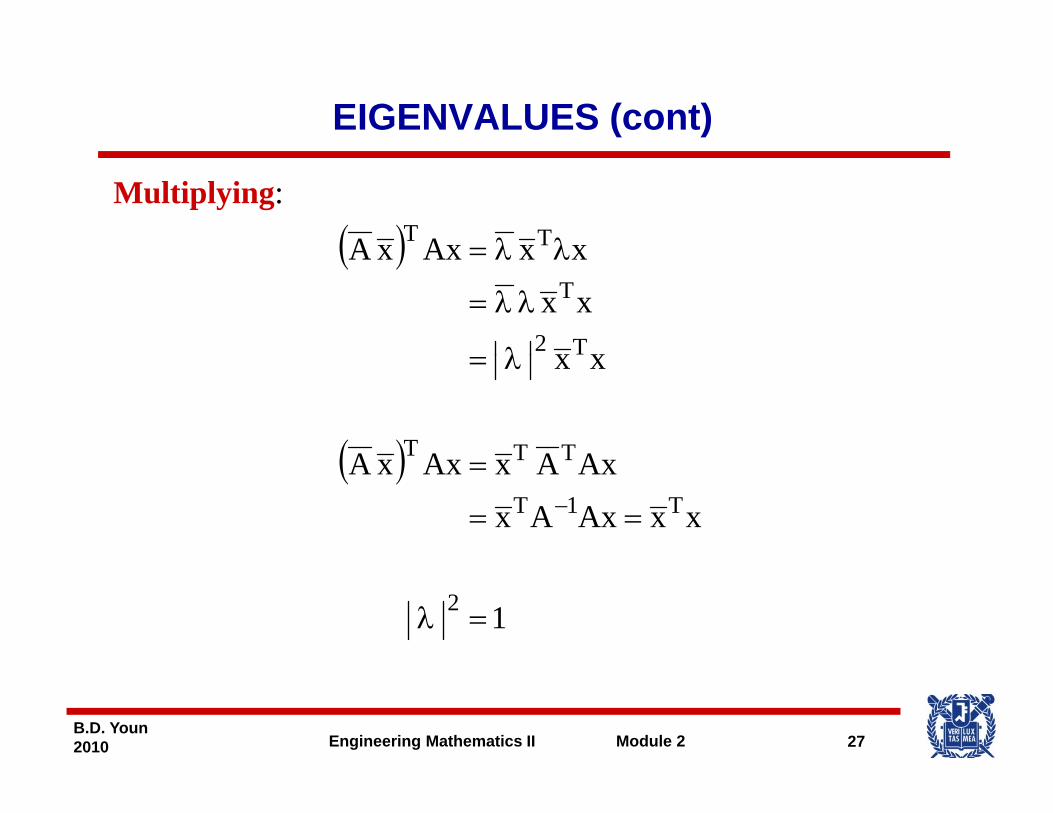
EIGENVALUES (cont)
( ) xxAxxA TT λλ=
Multiplying:
( )
xx
xx
xxAxxA
T2
T
λ
λλ=
λλ=
( ) AAAA
xx
TTT
λ=
( )xxAxAx
AxAxAxxAT1T
TT
==
=−
12 =λ
27B.D. Youn2010 Engineering Mathematics II Module 2
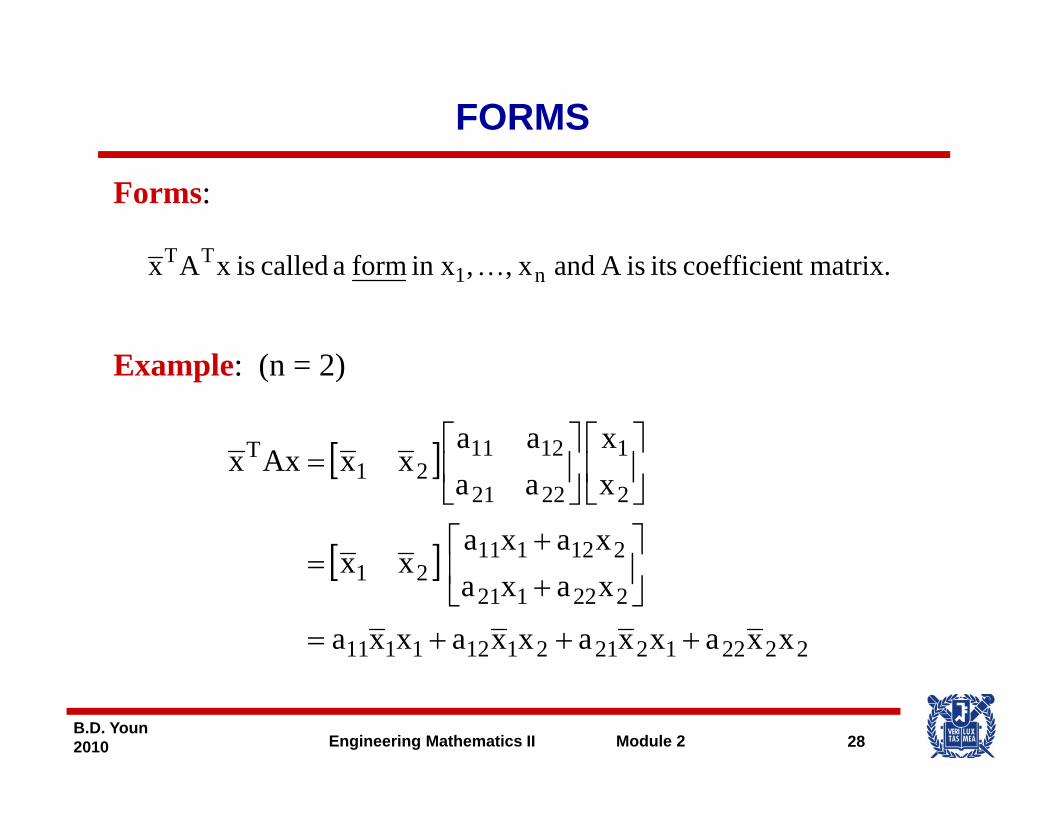
FORMS
TT
Forms:
matrix.t coefficienits isA andx,,in xforma called is xAx n1TT …
E l ( 2)Example: (n = 2)
[ ] 11211T xaaxxAxx ⎥
⎤⎢⎡
⎥⎤
⎢⎡[ ]
[ ] 212111
2222121
xaxaxx
xaaxxAxx
⎥⎤
⎢⎡ +
⎥⎦
⎢⎣
⎥⎦
⎢⎣
=
[ ]
2222122121121111
22212121
xxaxxaxxaxxa
xaxaxx
+++=
⎥⎦
⎢⎣ +
=
28B.D. Youn2010 Engineering Mathematics II Module 2
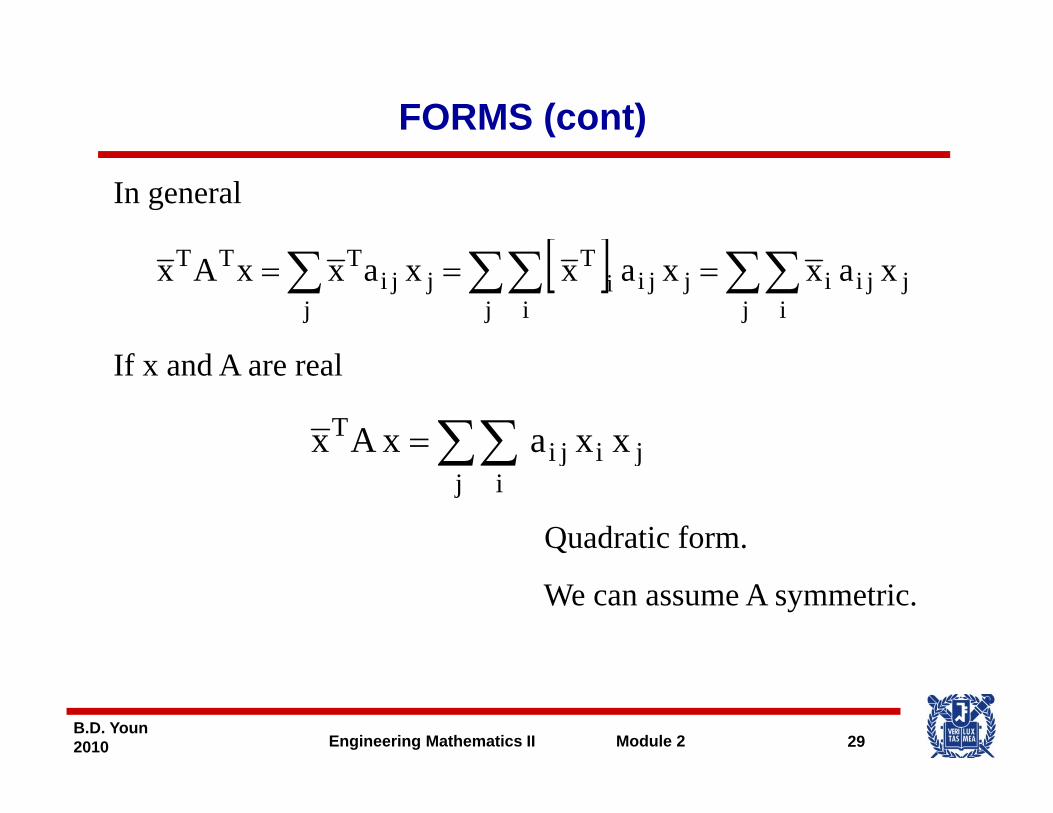
FORMS (cont)
In general
[ ] ∑∑∑∑∑ TTTT
If d A l
[ ] ∑∑∑∑∑ ===j i
jjiij i
jjiiT
jjji
TTT xaxxaxxaxxAx
If x and A are real
∑∑= jijiT xxaxAx
Quadratic form.
∑∑j i
jiji
We can assume A symmetric.
29B.D. Youn2010 Engineering Mathematics II Module 2
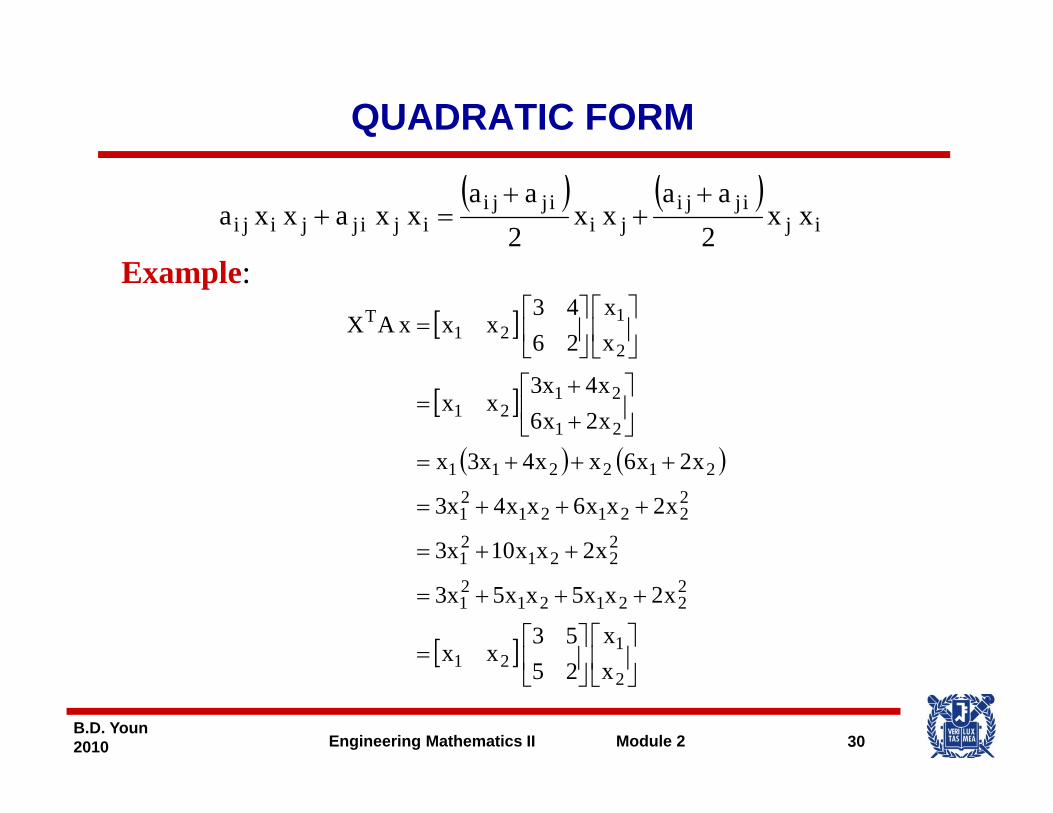
QUADRATIC FORM
( ) ( )ij
ijjiji
ijjiijijjiji xx
2a a
xx2
a a xxa xxa
++
+=+
Example:[ ] ⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
2
121
Txx
2643
xxxAX
[ ]
( ) ( )+++
⎥⎦
⎤⎢⎣
⎡++
=
⎦⎣⎦⎣
21
2121
2
2643
x2x6x4x3
xx
( ) ( )
++=
+++=
+++=
2221
21
222121
21
212211
x2xx10x3
x2xx6xx4x3
x2x6xx4x3x
[ ] ⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
+++=
121
222121
21
2211
x253
xx
x2xx5xx5x3
30B.D. Youn2010 Engineering Mathematics II Module 2
[ ] ⎥⎦
⎢⎣
⎥⎦
⎢⎣ 2
21 x25
QUADRATIC FORM (cont)
If A is Hermitian or skew-Hermitian; the form is called Hermitianor skew-Hermitian form.
Theorem: For every choice of x the value of an Hermitian form is realFor every choice of x, the value of an Hermitian form is real,and the value of a skew-Hermitian form is pure imaginary or 0.
Proof: Homework 1 (week 7)Proof: Homework 1 (week 7)
Properties of Unitary Matrices – Complex Vector Space Cn.
Inner Product: baba T=⋅
31B.D. Youn2010 Engineering Mathematics II Module 2
QUADRATIC FORM (cont)
Length or NormT aaaaaaaaaaa +++
2n
21
nn2211T
aa
aaaaaaaaaaa
++=
+++=⋅=⋅=
Theorem: A unitary transformation, y = Ax, A unitary, preserves the value of the inner product and the norm.
Proof:Proof: ( ) ( ) ( ) ( )
babaAbAa
AbAaAbaAAbaAvuvuT1T
TTTTT
⋅===
====⋅−
32B.D. Youn2010 Engineering Mathematics II Module 2
babaAbAa
QUADRATIC FORM (cont)
Theorem:
A square matrix is unitary iff its column vectors (row vectors)A square matrix is unitary iff its column vectors (row vectors) form a unitary system, i.e.,
Proof: ⎧ kj1Proof:
Theorem:⎩⎨⎧
≠=
==kj0kj1
aaaa kTjkj
Theorem:
The determinant of a unitary matrix has absolute value 1.
Proof:( ) ( ) ( ) ( )
2
TT1
Ad tAd tAd t
AdetAdetAdetAdetAAdetAAdet1 ⋅=⋅=⋅=⋅= −
33B.D. Youn2010 Engineering Mathematics II Module 2
AdetAdetAdet =⋅=
SIMULARITY OF MATRICES-BASIS OF EIGENVECTORS-DIAGONALIATION
Similarity of Matrices:
APPA
ifA matrix n n x an similar to called is Amatrix n n An1−=
×
( ) P.matrix n n x singularnon somefor APPA =
34B.D. Youn2010 Engineering Mathematics II Module 2
EIGENVALUES AND EIGENVECTORSOF SIMILAR MATRICES
AA tionTransforna
Similarity →
anisxPyAofreigenvectoanisxifeFurthermorA. as seigenvalue same has A then A, similar to is A If
1-=.eigenvalue same the toingcorrespond A ofr eigenvecto
an isx Py A, ofr eigenvectoan isx if e,Furthermor =
35B.D. Youn2010 Engineering Mathematics II Module 2
EIGENVALUES AND EIGENVECTORSOF SIMILAR MATRICES (cont)( )
Proof: Ax = λx λ an eigenvalue x ≠ 0
xPPAPAxP = −−− 111
xP
xPA
λ=
=−
−ˆ1
1
xPxPA λ= −−ˆ 11
yyAy
λ=ˆ
36B.D. Youn2010 Engineering Mathematics II Module 2
PROPERTIES OF EIGENVECTORS
Linear Independence
Let λ1, λ2, …, λn be distinct eigenvalues of an n × n matrix. The corresponding eigenvectors are linearly independent.
Proof
Suppose it is not the case. Let r be such that {x1, …, xr} linearly independent.
r < n
37B.D. Youn2010 Engineering Mathematics II Module 2
PROPERTIES OF EIGENVECTORS
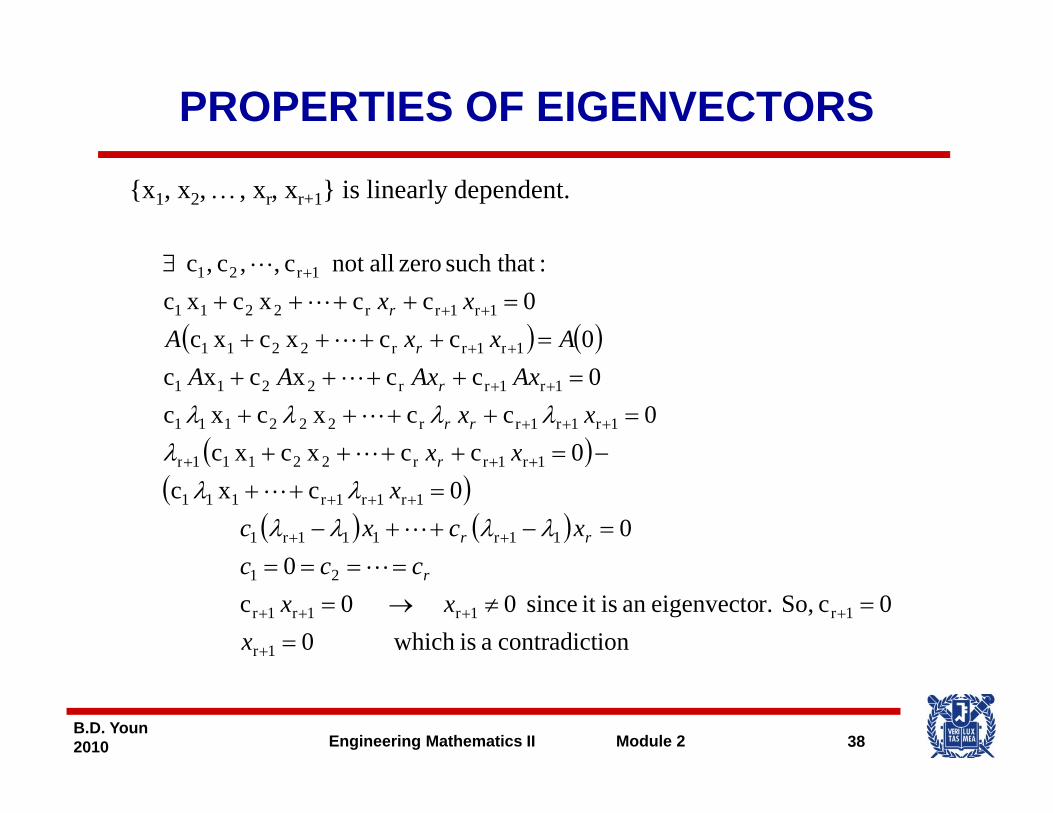
{x1, x2, …, xr, xr+1} is linearly dependent.
( ) ( )0c c xc xc0c c xc xc
:such thatzeroallnot c , ,c ,c
1r1rr2211
1r1rr2211
1r21
=++++=++++
∃
++
++
+
AxxAxx
r
r
( )0ccxcxc0c c xc xc
0c c xc xc
1122111
1r1r1rr222111
1r1rr2211
−=++++=++++
=++++
+++
++
xxxx
AxAxAA
rr
r
λλλλλ
( )( )
( ) ( )0
00c xc
0ccxc xc
11r111r1
1r1r1r111
1r1rr22111r
=−++−=++++++
++
+++
+++
xcxcx
xx
rr
r
λλλλλλ
λ
ioncontradict a is which 0 0c So, r.eigenvectoan isit since 0 0c
0
1r
1r1r1r1r
21
==≠→=
====
+
++++
xxx
ccc r
38B.D. Youn2010 Engineering Mathematics II Module 2
BASIS OF EIGENVECTORS
If an n × n matrix A has n distinct eigenvalues then A has aIf an n × n matrix A has n distinct eigenvalues, then A has abasis of eigenvectors.
A Hermitian, skew-Hermitian or unitary matrix has a basis of, yeigenvectors that is a unitary system. A symmetric matrix hasan orthonormnal basis of eigenvectors.
(not proved here)
39B.D. Youn2010 Engineering Mathematics II Module 2
DIAGONALIZATION
If an n × n matrix A has a basis of eigenvectors then
D X-1AXD = X 1AX
is diagonal with the eigenvalues of A or the diagonal. X is thematrix of eigenvectors as column vectorsmatrix of eigenvectors as column vectors.
Dm = X-1AmX
lFor example,
XAXAXXAXXDDD 21112 −−− =⋅=⋅=
40B.D. Youn2010 Engineering Mathematics II Module 2
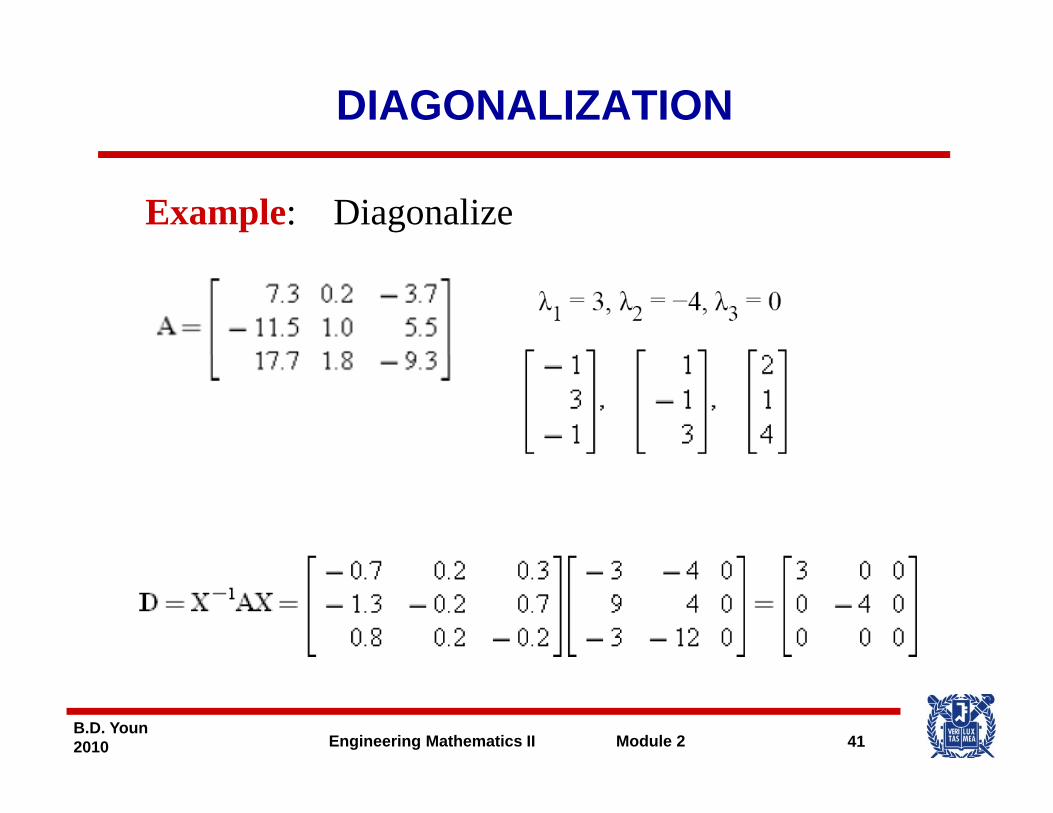
DIAGONALIZATION
Example: Diagonalize
41B.D. Youn2010 Engineering Mathematics II Module 2
TRANSFORMATION OFFORMS TO PRINCIPAL AXES
T
Explained for quadratic forms
AxxQ T=
We assume: A is symmetric
→A has an orthonormal basis of n eigenvectors.
X is orthogonal
→
1
T1
AXXDAXXD
XX
→
=−
−
T1 XDXXDXA
AXXDAXXD
==
=→=−
42B.D. Youn2010 Engineering Mathematics II Module 2
TRANSFORMATION OFFORMS TO PRINCIPAL AXES (cont)
1T
TT1TT
xXy x X y ,xXy Set
xXDXxxXDXxAxxQ
=⇒==
===−
−
( )
11
TTTTT
y
yxX yxXX x And
⎤⎡⎤⎡λ
=⇒==
[ ]1
2
1
n1T
y
y
yyDyyQ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
λ
λλ
==
11
nn
y
y
⎥⎤
⎢⎡
λλ
⎦⎣⎦⎣ λ
[ ]
222
nn
22n21
y
yyyyQ
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣ λ
λ=
43B.D. Youn2010 Engineering Mathematics II Module 2
2nn
222
211 yyy λ++λ+λ=