Ανάλυση Σ.Α.Ε στο χώρο κατάστασης
36
ΚΕΣ 01: Αυτόματος Έλεγχος © 2006 Nicolas Tsapatsoulis Ανάλυση Σ.Α.Ε στο χώρο κατάστασης ΚΕΣ 01 – Αυτόματος Έλεγχος
description
ΚΕΣ 01 – Αυτόματος Έλεγχος. Ανάλυση Σ.Α.Ε στο χώρο κατάστασης. Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης. Βιβλιογραφία Ενότητας. - PowerPoint PPT Presentation
Transcript of Ανάλυση Σ.Α.Ε στο χώρο κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Ανάλυση Σ.Α.Ε στο χώρο κατάστασης
ΚΕΣ 01 – Αυτόματος Έλεγχος

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
◊ Παρασκευόπουλος [2004]: Κεφάλαιο 5: Ενότητες 5.1-5.2
◊ Παρασκευόπουλος [2005]: Εφαρμογές, Κεφάλαιο 5
◊ DiStefano [1995]: Chapter 3: Section 3.15, Chapter 20: Sections 20.1 & 20.2
◊ Tewari [2005]: Chapters 3 & 4
Βιβλιογραφία Ενότητας Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Ορισμός Καταστάσεων και Χώρου Κατάστασης
◊ Οι εξισώσεις κατάστασης είναι μια περιγραφή στο πεδίο του χρόνου η οποία μπορεί να χρησιμοποιηθεί για μια μεγάλη γκάμα συστημάτων όπως γραμμικά, μη γραμμικά, χρονικά αναλλοίωτα ή μη, με ή χωρίς αρχικές συνθήκες
◊ Κατάσταση ονομάζουμε ένα σύνολο εσωτερικών μεταβλητών του συστήματος η παρακολούθηση των οποίων στον χρόνο μας περιγράφει το σύστημα.
◊ Οι παραπάνω μεταβλητές ονομάζονται μεταβλητές κατάστασης
◊ Χώρος κατάστασης ονομάζεται ο Ευκλείδιος χώρος ο οποίος δημιουργείται από τις μεταβλητές κατάστασης
◊ Ορισμός:
◊ Οι μεταβλητές κατάστασης x1(t), x2(t), …, xn(t) ενός συστήματος ορίζονται ως ένας
(ελάχιστος) αριθμός μεταβλητών τέτοιων ώστε αν γνωρίζουμε τις τιμές τους για
οποιαδήποτε χρονική στιγμή t0, τη συνάρτηση εισόδου που εφαρμόζεται στο
σύστημα για t≥ t0, και το μαθηματικό νόμο που συνδέει την είσοδο, τις
μεταβλητές κατάστασης και το σύστημα, να καθίσταται δυνατός ο προσδιορισμός
της κατάστασης του συστήματος για οποιαδήποτε χρονική στιγμή t≥ t0.
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Πλήθος και επιλογή μεταβλητών κατάστασης
◊ Ο ελάχιστος αριθμός των μεταβλητών κατάστασης είναι ίσος με την τάξη του συστήματος:
◊ Αυτό είναι απαραίτητο διότι για τον πλήρη προσδιορισμό της εξόδου ενός συστήματος τάξης n χρειάζονται n αρχικές συνθήκες. Εφόσον οι μεταβλητές κατάστασης μπορούν να προδιαγράψουν πλήρως το σύστημα για οποιαδήποτε χρονική στιγμή είναι φανερό ότι πρέπει να είναι ίσες σε πλήθος με το πλήθος των αρχικών συνθηκών.
◊ Οι μεταβλητές κατάστασης για να μπορούν να περιγράψουν πλήρως το σύστημα πρέπει να είναι γραμμικά ανεξάρτητες.
◊ Για την περιγραφή ενός συστήματος μπορούν να επιλεγούν διάφορα σύνολα μεταβλητών κατάστασης φτάνει να έχουν πλήθος n (όσο η τάξη του συστήματος) και να είναι γραμμικά ανεξάρτητες.
◊ Σε ηλεκτρικά και ηλεκτρονικά κυκλώματα οι μεταβλητές κατάστασης είναι συνήθως γραμμικές συναρτήσεις των (α) φορτίων των πυκνωτών, (β) ρευμάτων στα πηνία. Τα στοιχεία αυτά μπορούν να έχουν αρχικές συνθήκες οι οποίες επηρεάζουν τον προσδιορισμό της εξόδου του συστήματος.
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Περιγραφή Σ.Α.Ε στο χώρο κατάστασης
◊ Έστω το σύστημα πολλών εισόδων – πολλών εξόδων του σχήματος. Μπορούμε να εκφράσουμε τις m εισόδους, p εξόδους και n μεταβλητές κατάστασης ως διανύσματα:
◊ Οι εξισώσεις κατάστασης ενός συστήματος είναι ένα σύστημα n διαφορικών εξισώσεων πρώτης τάξης που συνδέει το διάνυσμα εισόδου u(t) με το διάνυσμα κατάστασης x(t) και έχει τη μορφή:
όπου f είναι μια στήλη με n στοιχεία. Η συνάρτηση f είναι γενικά μια πεπλεγμένη μη γραμμική συνάρτηση των x(t) και u(t)
◊ Το διάνυσμα εξόδου y(t) συνδέεται με τα διανύσματα εισόδου u(t) και κατάστασης x(t) με την εξίσωση εξόδου:
)(
)(
)(
)( 2
1
tu
tu
tu
t
m
u
)(
)(
)(
)(2
1
ty
ty
ty
t
p
y
)(
)(
)(
)( 2
1
tx
tx
tx
t
n
x
)(),()( ttt uxfx
)(),()( ttt uxgy
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Εξισώσεις Κατάστασης(ΙΙΙ)
όπου g είναι μια στήλη με p στοιχεία. Η συνάρτηση g είναι γενικά μια πεπλεγμένη μη γραμμική συνάρτηση των x(t) και u(t)
◊ Οι αρχικές συνθήκες των εξισώσεων κατάστασης είναι οι τιμές του διανύσματος κατάστασης x(t) για t=t0 (t0 ισούται συνήθως με 0) και
συμβολίζονται ως εξής:
◊ Οι εξισώσεις κατάστασης, η εξίσωση εισόδου και οι αρχικές συνθήκες συνθέτουν την περιγραφή ενός δυναμικού συστήματος στο χώρο κατάστασης:
)(
)(
)(
)(
0
02
01
00
tx
tx
tx
t
n
xx
)(),()( ttt uxfx
)(),()( ttt uxgy
00 )( xx t
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Εξισώσεις κατάστασης
◊ Αν ένα γραμμικό μη χρονικά μεταβαλλόμενο σύστημα μπορεί να περιγραφεί από ένα σύστημα συνήθων διαφορικών εξισώσεων, τότε οι εξισώσεις κατάστασης παίρνουν την ειδική μορφή:
◊ Ο πίνακας Α έχει διαστάσεις nxn και ονομάζεται πίνακας του συστήματος, ο πίνακας Β έχει διαστάσεις nxm και ονομάζεται πίνακας εισόδου, ο πίνακας C έχει διαστάσεις pxn και ονομάζεται πίνακας εξόδου, ο πίνακας D έχει διαστάσεις pxm και ονομάζεται απευθείας πίνακας.
)()()( ttt BuAxx
)()()( ttt DuCxy
00 )( xx t
nn
n
n
nn a
a
a
a
a
a
a
a
a
:
...
:
...
...
:2
1
2
22
12
1
21
11
A
nm
m
m
nn b
b
b
b
b
b
b
b
b
:
...
:
...
...
:2
1
2
22
12
1
21
11
B
pn
n
n
pp c
c
c
c
c
c
c
c
c
:
...
:
...
...
:2
1
2
22
12
1
21
11
C
pm
m
m
pp d
d
d
d
d
d
d
d
d
:
...
:
...
...
:2
1
2
22
12
1
21
11
D
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Περιγραφή γραμμικών χρονικά μεταβαλλόμενων συστημάτων
◊ Αν ένα γραμμικό χρονικά μεταβαλλόμενο σύστημα μπορεί να περιγραφεί από ένα σύστημα συνήθων διαφορικών εξισώσεων, τότε οι εξισώσεις κατάστασης παίρνουν τη μορφή:
)()()()()( ttttt uBxAx
)()()()()( ttttt uDxCy
00 )( xx t
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα
◊ Το ηλεκτρικό κύκλωμα του σχήματος περιγράφεται από την Ο.Δ.Ε (έξοδος η τάση στα άκρα της αντίστασης):
◊ Θεωρώντας ως μεταβλητές κατάστασης
◊ το ρεύμα στο πηνίο,
x1(t)=iL(t)
◊ τo φορτίο του πυκνωτή
◊ τότε ισχύει
)()(1)(
0
tvRidiCdt
tdiL
t
t
C ditx0
2 )()(
)()()()( 12 txtititx LC
)()()(1
)( 121 tvtRxtxC
txL
)(
0
1
)(
)(
0
1
1)(
)(
2
1
2
1
tvL
tx
txLCL
R
tx
tx
)(
)(
0)(
2
1
tx
tx
Rty
0
0
2
1
)0(
)0(
)0(
)0(
)0(
CV
i
CV
i
x
x
c
L
x
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Λύση Εξισώσεων Κατάστασης
◊ Η λύση των εξισώσεων κατάστασης στοχεύει στον προσδιορισμό του διανύσματος κατάστασης x(t) για κάθε χρονική στιγμή t≥ t0 (συνήθως το t0
λαμβάνεται ίσο με μηδέν).
◊ Η λύση των εξισώσεων κατάστασης
με αρχικές συνθήκες:
περιλαμβάνει την εύρεση της λύσης της ομογενούς εξίσωσης:
η οποία ονομάζεται ελεύθερη απόκριση του συστήματος, καθώς και την εύρεση της απόκρισης του συστήματος στη διέγερση u(t) η οποία ονομάζεται διεγερμένη απόκριση.
◊ Για την εύρεση της ελεύθερης απόκρισης μετασχηματίζουμε κατά Laplace την ομογενή εξίσωση:
=> =>
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx 00 )( xx t
)()( tt Axx 00 )( xx t
)()( tt Axx )()0()( sss AXxX 011 }){()( xAIx sLt

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Μεταβατικός πίνακας κατάστασης
◊ Ο πίνακας
ονομάζεται μεταβατικός πίνακας κατάστασης διότι μας προσδιορίζει τη μετάβαση του διανύσματος κατάστασης x(t) από την αρχική κατάσταση (Ι είναι ο πίνακας με μοναδικά μη μηδενικά στοιχεία αυτά της κύριας διαγωνίου)
σε οποιαδήποτε τελική κατάσταση x(t).
◊ Ο πίνακας μπορεί να προσδιοριστεί από το ανάπτυγμα Taylor:
για αυτό και συμβολίζεται με
◊ Ιδιότητες μεταβατικού πίνακα κατάστασης:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
}){()( 11 AIΦ sLt
0)0( xx
}){()( 11 AIΦ sLt
...!3
1
!2
1)( 3322 tttt AAAIΦ
tet AΦ )(
IΦ )0( )()(1 tt ΦΦ
210020112 ,,)()()( ttttttttt ΦΦΦ
)()( tkt k ΦΦ

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Υπολογισμός μεταβατικού πίνακα κατάστασης
◊ Υπάρχουν διάφορες μέθοδοι για τον υπολογισμό του μεταβατικού πίνακα κατάστασης:
Μέθοδος 1:
Απευθείας υπολογισμός από τη σχέση
Η μέθοδος αυτή είναι δύσκολή όταν ο πίνακας Α έχει διαστάσεις μεγαλύτερες από 3x3 εξαιτίας της δυσκολίας αντιστροφής του πίνακα:
Παράδειγμα:
Να ευρεθεί ο μεταβατικός πίνακας κατάστασης για το σύστημα
με
και να υπολογίσετε το διάνυσμα κατάστασης
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
}){()( 11 AIΦ sLt
)( AI s
)()()( ttt BuAxx 0)0( xx
31
21A
1
0B
0
10x

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα
◊ Σχηματίζουμε τον πίνακα:
οπότε ο μεταβατικός πίνακας κατάστασης θα είναι:
και το διάνυσμα κατάστασης ισούται με:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)( AI s
31
21)(
s
ss AI
11
23
54
1
31
21)(
21
11
s
s
ssL
s
sLtΦ
)sin(cossin
sin2)sin(cos)(
22
22
ttete
tettet
tt
tt
Φ
0)()( xΦx tt
te
tte
ttete
tettet
t
tt
tt
sin
)sin(cos
0
1
)sin(cossin
sin2)sin(cos2
2
22
22

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα (συν.)
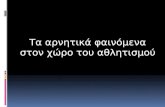
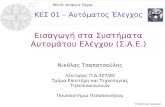
◊ Η χρονική μορφή του διανύσματος κατάστασης φαίνεται στο σχήμα.
◊ Είναι φανερό πως η ελεύθερη απόκριση του συστήματος στις συγκεκριμένες αρχικές συνθήκες προοδευτικά μηδενίζεται.
◊ Για τον υπολογισμό του μεταβατικού πίνακα κατάστασης στη Matlab χρειάζεται η χρήση του symbolic math toolbox:
◊ Εντολές:◊ syms t (για ορισμό της t ως
συμβολικής μεταβλητής)
◊ Phi = expm(A*t); (όπου ο Α έχει οριστεί σύμφωνα με τις τιμές που δόθηκαν στην εκφώνηση του παραδείγματος)
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
t
State space vector
x1(t)
x2(t)

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Υπολογισμός μεταβατικού πίνακα κατάστασης (ΙΙ)
Μέθοδος 2:
Υπολογισμός από τη σχέση
με τη βοήθεια του αλγορίθμου του Leverrier o οποίος χρησιμοποιείται για την αντιστροφή του πίνακα:
όπου:
και οι πίνακες Fi και οι συντελεστές ai υπολογίζονται επαναληπτικά από τις
σχέσεις:
Ο αλγόριθμος Leverrier αναπτύχθηκε για ευκολία υπολογισμού του αντίστροφου του πίνακα μέσω υπολογιστή.
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)( AI s
}){()( 11 AIΦ sLt
)}({)( 1 sLt ΦΦ nn
nnnn
nn
asasas
FFsFsFss
11
1
122
11
...
...)(Φ
I1F
IA 112 aFF
IA 11 nnn aFF
)( 11 Fίa A
)(2
122 Fίa A
)(1
nn Fίn
a A
)( AI s

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Υπολογισμός μεταβατικού πίνακα κατάστασης (ΙΙΙ)
Μέθοδος 3:
Με διαγωνοποίηση του πίνακα A (ισχύει εφόσον οι ιδιοτιμές του A είναι διακριτές, δηλαδή δεν έχουμε ιδιοτιμές με πολλαπλότητα μεγαλύτερη από 1).
◊ Οι ιδιοτιμές λi, i=1,…,n, του πίνακα A δίνονται αποτελούν λύσεις της εξίσωσης:
δηλαδή είναι τιμές του λ για τις οποίες μηδενίζεται η ορίζουσα
◊ Σημειώνεται ότι η ορίζουσα μας δίνει το Χαρακτηριστικό Πολυώνυμο του συστήματος. Επομένως οι ιδιοτιμές του πίνακα A αποτελούν τους πόλους του πίνακα συναρτήσεων μεταφοράς.
Εφόσον ο πίνακας Α διαγωνοποιείται μπορεί να γραφεί ως:
όπου T ο πίνακας με στήλες τα ιδιοδιανύσματα του Α και Λ ο πίνακας με διαγώνια στοιχεία τις ιδιοτιμές του Α.
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
0 AIAI
AI s
1 ΛTTA
n
n
0...00
0...00
...............
00...0
00...0
1
2
1

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Υπολογισμός μεταβατικού πίνακα κατάστασης (ΙV)
Μέθοδος 3 (συν):
Με βάση τα προηγούμενα ο μεταβατικός πίνακας μπορεί να γραφεί:
όπου
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
AI s
t
t
t
t
t
n
n
e
e
e
e
e
0...00
0...00
...............
00...0
00...0
1
2
1
Λ
1
13322
33122111
3322
...!3
1
!2
1
...!3
1
!2
1
...!3
1
!2
1)(
TT
TΛΛΛIT
ΛTTΛTTΛTTTT
AAAIΦ
Λ
A
t
t
e
ttt
ttt
tttet

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα:
Να ευρεθεί ο μεταβατικός πίνακας κατάστασης (με διαγωνοποίηση του πίνακα Α) για το σύστημα
με
και να υπολογίσετε το διάνυσμα κατάστασης
Λύση:
=> λ1=-1, λ2=-2. Οι ιδιοτιμές είναι διακριτές
άρα ο πίνακας Α μπορεί να διαγωνοποιηθεί.
Τα ιδιοδιανύσματα που αντιστοιχούν στις παραπάνω ιδιοτιμές ικανοποιούν τη σχέση: και είναι (βλέπε εντολή eig στη Matlab)
οπότε ο πίνακας Τ είναι:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx 0)0( xx
32
10A
1
0B
0
10x
0232 AI
iii vvA
7071.0
7071.01v
8944.0
4472.02v
8944.0
4472.0
7071.0
7071.0T

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα (συν.)
Επομένως ο μεταβατικός πίνακας κατάστασης θα είναι:
τελικά
και το διάνυσμα κατάστασης ισούται με:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
2361.22361.2
4142.18284.2
0
0
8944.07071.0
4472.07071.0)(
21
t
tt
e
eet TTΦ Λ
tttt
tttt
eeee
eeeet
22
22
222
2)(Φ
tt
tt
tttt
tttt
ee
ee
eeee
eeeett
2
2
22
22
22
2
0
1.
222
20)()( xΦx

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα (συν.)
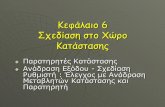
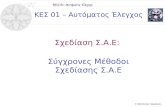
◊ Η χρονική μορφή του διανύσματος κατάστασης φαίνεται στο σχήμα.
◊ Είναι φανερό πως η ελεύθερη απόκριση του συστήματος στις συγκεκριμένες αρχικές συνθήκες προοδευτικά μηδενίζεται.
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
t
State space vector
x1(t)
x2(t)

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Υπολογισμός μεταβατικού πίνακα κατάστασης (V)
Μέθοδος 4:
Η τελευταία μέθοδος για υπολογισμό του μεταβατικού πίνακα κατάστασης βασίζεται στη σχέση:
και είναι καθαρά προγραμματιστική. Επειδή η παραπάνω σειρά έχει άπειρους όρους ο υπολογισμός του μεταβατικού πίνακα κατάστασης είναι προσεγγιστικός:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
...!3
1
!2
1)( 3322 tttt AAAIΦ
kk tk
tttt AAAAIΦ!
1...
!3
1
!2
1)(ˆ 3322

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Γενική λύση εξισώσεων κατάστασης
◊ Η γενική λύση των εξισώσεων κατάστασης
◊ στοχεύει υπολογίζει και τη διεγερμένη απόκριση η οποία βασίζεται και αυτή στον μεταβατικό πίνακα κατάστασης και δίνεται από το συνελικτικό ολοκλήρωμα:
◊ Ο υπολογισμός του παραπάνω συνελικτικού ολοκληρώματος είναι δύσκολος για τις περισσότερες μορφές εισόδου (εξαίρεση αποτελούν η κρουστική και η βηματική συνάρτηση).
◊ Ο απλούστερος τρόπος για την εύρεση του διανύσματος κατάστασης είναι η χρήση του μετασχηματισμού Laplace:
=>
=>
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx 00 )( xx t
dtttttt
t
)()()()()(
0
00 ΒuΦxΦx
)()()( ttt BuAxx )()()0()( ssss BUAXxX
)()0()( sss BUxXAΙ )()0()( 1 sss BUxAΙX

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα
Παράδειγμα:
Να υπολογίσετε το διάνυσμα κατάστασης για το σύστημα:
όταν η είσοδος είναι η βηματική συνάρτηση us(t)
Λύση:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx 0)0( xx
31
21A
1
0B
0
10x
11
23
54
1
31
21)()(
2
11
s
s
sss
sss AIΦ
)()0()()( sss BUxΦX
ss
s
ss
1
1
0
0
1
11
23
54
12
sss
s
ssss
s
ss 11
23
54
111
11
23
54
122

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα (συν.)
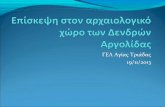
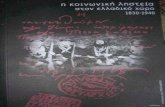
Οπότε τελικά:
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
tte
ttet
t
t
sin8cos5
1
5
1
sin9cos75
1
5
2
)(2
2
x
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
t
State space vector
x1(t)
x2(t)

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Ελέγξιμο διανύσματος κατάστασης
◊ Η έννοια του ελέγξιμου αναφέρεται στη δυνατότητα ελέγχου του διανύσματος κατάστασης από το διάνυσμα εισόδου.
◊ Η δυνατότητα προσδιορισμού της ελεγξιμότητας είναι ένα από τα βασικά πλεονεκτήματα της περιγραφής συστημάτων μέσω των εξισώσεων κατάστασης.
Ορισμός:
◊ Το διάνυσμα κατάστασης x(t) είναι ελέγξιμο αν υπάρχει κάποια τμηματικά συνεχής
συνάρτηση εισόδου (ελέγχου) u(t) που μπορεί να οδηγήσει το x(t) από την αρχική
συνθήκη x(t0) στη τελική του τιμή x(tf) σε ένα πεπερασμένο χρονικό διάστημα (tf-
t0)≥0.
Θεώρημα:
◊ Το διάνυσμα κατάστασης x(t) του συστήματος που περιγράφεται από τις παραπάνω
εξισώσεις κατάστασης είναι ελέγξιμο τότε και μόνο τότε η τάξη του πίνακα S
(διαστάσεων nxnm) είναι ίση με n (υπάρχουν δηλαδή n ανεξάρτητες στήλες στον
πίνακα S)
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx )()()( ttt DuCxy
BABAABBS 12 |...||| n
00 )( xx t

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Ελέγξιμο διανύσματος εξόδου
◊ Η έννοια του ελέγξιμου της εξόδου αναφέρεται στη δυνατότητα ελέγχου του διανύσματος εξόδου από το διάνυσμα εισόδου.
Ορισμός:
◊ Το διάνυσμα εξόδου y(t) είναι ελέγξιμο αν υπάρχει κάποια τμηματικά συνεχής
συνάρτηση εισόδου (ελέγχου) u(t) που μπορεί να οδηγήσει το y(t) από την αρχική
συνθήκη y(t0) στη τελική του τιμή y(tf) σε ένα πεπερασμένο χρονικό διάστημα
(tf-t0)≥0.
Θεώρημα:
◊ Το διάνυσμα εξόδου y(t) του συστήματος που περιγράφεται από τις παραπάνω
εξισώσεις κατάστασης είναι ελέγξιμο τότε και μόνο τότε η τάξη του πίνακα Q
(διαστάσεων px(m+1)n) είναι ίση με p (υπάρχουν δηλαδή p ανεξάρτητες στήλες
στον πίνακα Q)
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx )()()( ttt DuCxy
00 )( xx t
BCABCACABCBDQ 12 |...|||| n

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα
Να ελεγχθεί το ελέγξιμο του διανύσματος κατάστασης και του διανύσματος εξόδου για το σύστημα
με
Λύση:
Κατασκευάζουμε τους πίνακες S και Q (έχουμε n=m=p=2):
η τάξη του S είναι 2, άρα το διάνυσμα κατάστασης είναι ελέγξιμο. Η τάξη του Q είναι 2 άρα το διάνυσμα εξόδου είναι ελέγξιμο
)()()( ttt BuAxx 0)0( xx
50
32A
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt DuCxy
10
11B
10
01C
00
01D
5010
1211|ABBS
501000
121101|| CABCBDQ

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα (ΙΙ)
Να ελεγχθεί το ελέγξιμο του διανύσματος κατάστασης και του διανύσματος εξόδου για το σύστημα
με
Λύση:
Κατασκευάζουμε τους πίνακες S και Q (έχουμε n=2,m=p=1):
η τάξη του S είναι 1 (ορίζουσα |S |=0) , άρα το διάνυσμα κατάστασης δεν είναι ελέγξιμο. Η τάξη του Q είναι 1 άρα το διάνυσμα εξόδου είναι ελέγξιμο
)()()( ttt BuAxx 0)0( xx
50
32A
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt DuCxy
0
1B 01C 0D
00
21|ABBS
210|| CABCBDQ

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παρατηρήσιμο διανύσματος κατάστασης
◊ Η έννοια του παρατηρήσιμου αναφέρεται στη δυνατότητα προσδιορισμού των αρχικών συνθηκών x(t0) (αρχική κατάσταση συστήματος) με βάση τα
διανύσματα εισόδου u(t) και εξόδου y(t) τα οποία μετράμε σε ένα πεπερασμένο χρονικό διάστημα.
◊ Σε περίπτωση που έστω καιμια μεταβλητή κατάστασης δεν είναι παρατηρήσιμη τότε το σύστημα συνολικά δεν είναι παρατηρήσιμο.
◊ Η δυνατότητα προσδιορισμού του παρατηρήσιμου ενός συστήματος είναι ένα από τα βασικά πλεονεκτήματα της περιγραφής συστημάτων μέσω των εξισώσεων κατάστασης.
Ορισμός:
◊ Το διάνυσμα κατάστασης x(t) είναι παρατηρήσιμο στο διάστημα [t0 tf] όταν
γνωρίζοντας τα τα διανύσματα εισόδου u(t) και εξόδου y(t) για tє[t0 tf] μπορούμε να
προσδιορίσουμε το διάνυσμα αρχικών συνθηκών x(t0)
)()()( ttt BuAxx )()()( ttt DuCxy
00 )( xx t
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παρατηρήσιμο διανύσματος κατάστασης (ΙΙ)
Θεώρημα:
◊ Το διάνυσμα κατάστασης x(t) του συστήματος που περιγράφεται από τις παρακάτω
εξισώσεις κατάστασης είναι παρατηρήσιμο τότε και μόνο τότε η τάξη του πίνακα R
(διαστάσεων nxnp) είναι ίση με n (υπάρχουν δηλαδή n ανεξάρτητες στήλες στον
πίνακα R)
Παράδειγμα:
◊ Να βρεθεί αν το διάνυσμα κατάστασης του συστήματος με
είναι παρατηρήσιμο:
Λύση
Ο πίνακας R είναι τάξης 2, άρα το
σύστημα δεν είναι παρατηρήσιμο
TnTTTTTTT CACACACR12
|...|||
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
300
020
001
A
10
01
00
B 101C
931
000
111
||2 TTTTTT CACACR

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Πίνακας Συναρτήσεων Μεταφοράς
◊ Από τις εξισώσεις κατάστασης μπορούμε να μεταβούμε σε περιγραφή με πίνακα συναρτήσεων μεταφοράς H(s) (υπό την προϋπόθεση μηδενικών αρχικών συνθηκών) με χρήση το μετασχηματισμού Laplace:
=> =>
=>
οπότε
άρα
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( sss UHY
)()()( ttt BuAxx
)()()( ttt DuCxy
)()()0()( ssss BUAXxX )()( 1 sss BUAΙX
)()()( sss DUXCY
)()()( 1 sss UDBAICY
DBAICH 1)()( ss

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Συναρτήσεις Μεταφοράς και ελέγξιμο και παρατηρήσιμο
Θεώρημα 1:
◊ Αν ο πίνακας συναρτήσεων μεταφοράς H(s) ενός συστήματος παρουσιάζει απαλοιφή πόλων μηδενικών τότε το σύστημα είναι είτε μη ελέγξιμο ή μη παρατηρήσιμο ή και τα δύο. Αν δεν έχουμε απαλοιφή πόλων μηδενικών τότε το σύστημα με πίνακα συναρτήσεων μεταφοράς H(s) μπορεί να περιγραφεί με εξισώσεις κατάστασης ως ένα ελέγξιμο και παρατηρήσιμο σύστημα.
Θεώρημα 2:
◊ Ο πίνακας συναρτήσεων μεταφοράς H(s) περιέχει μόνο το ελέγξιμο και παρατηρήσιμο μέρος ενός συστήματος (εκτός ειδικών περιπτώσεων όπου το χαρακτηριστικό πολυώνυμο έχει ρίζες πολλαπλότητας μεγαλύτερης από 1).
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Συναρτήσεις Μεταφοράς και ελέγξιμο και παρατηρήσιμο (ΙΙ)
Παράδειγμα:
◊ Έστω το ηλεκτρονικό κύκλωμα του σχήματος:
◊ Ο πίνακας συναρτήσεων μεταφοράς H(s) έχει τη μορφή:
Παρατηρούμε ότι αν C1Rf1= C2Rf2 η H12(s) παρουσιάζει απαλοιφή πόλου
μηδενικού και γίνεται
οπότε το σύστημα
εμφαίνεται ως τάξης 1 (ενώ είναι φανερό ότι είναι τάξης 2)
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)(
)(
)()(
)()(
)(
)(
2
1
2221
1211
02
01
sV
sV
sHsH
sHsH
sV
sV1
1)(
1111
111
sRCR
RsH
f
f 0)(12 sH
sRC
sRCsH
f
222
2222
1)(
sRC
sRC
sRCR
RsH f
f
f
212
22
1111
121
1
1
1)(
sRCR
RsH f
21211
121
1)(

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Έλεγχος ευστάθειας στο χώρο κατάστασης
◊ Συστήματα με περιγραφή στο χώρο κατάστασης μπορούν να ελεγχθούν ως προς την ευστάθεια τους με τη βοήθεια των πιο κάτω ορισμών:
◊ Ορισμός 1:
◊ Έστω το Γ.Χ.Α σύστημα
Θεωρούμε ότι το σύστημα είναι μηδενικής διέγερσης (u(t)=0), εξετάζουμε δηλαδή την ελεύθερη απόκριση του συστήματος. Το σύστημα είναι ευσταθές αν για κάθε πεπερασμένη αρχική συνθήκη x(0) υπάρχει αριθμός Μ(x(0)) τέτοιος ώστε να ικανοποιούνται οι συνθήκες:
όπου είναι το μέτρο του διανύσματος κατάστασης για ελεύθερη είσοδο.
Με δεδομένο ότι η ελεύθερη απόκριση του συστήματος δίνεται από τη σχέση:
και ότι το x(0) είναι πεπερασμένο, οι παραπάνω σχέσεις ισοδυναμούν με
δηλαδή όλα τα στοιχεία του μεταβατικού πίνακα κατάστασης μηδενίζονται με την πάροδο του χρόνου
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx
)()()( ttt DuCxy 0)0( xx
0,)( tMtx 0)(lim
tt
x
222
21 ...)( nxxxt x
)0()()( xΦx tt0)(lim
t
tΦ

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Έλεγχος ευστάθειας στο χώρο κατάστασης (ΙΙ)
◊ Ορισμός 2:
◊ Έστω το Γ.Χ.Α σύστημα:
για το οποίο ισχύει (εφόσον είναι ελέγξιμο και παρατηρήσιμο):
Το σύστημα είναι ευσταθές αν οι ιδιοτιμές του πίνακα A (ισοδύναμα οι πόλοι του Χ.Π.
) βρίσκονται στο αριστερό μιγαδικό ημιεπίπεδο (έχουν πραγματικό μέρος αρνητικό).
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
)()()( ttt BuAxx )()()( ttt DuCxy
0)0( xx
DBAICH 1)()( ss
AI ssp )(

ΚΕΣ 01: Αυτόματος ΈλεγχοςΚΕΣ 01: Αυτόματος Έλεγχος
© 2006 Nicolas Tsapatsoulis
Παράδειγμα
Παράδειγμα:
◊ Να ελεγχθεί η ευστάθεια του συστήματος με:
και να υπολογιστεί ο πίνακας συναρτήσεων μεταφοράς
Λύση
Οι ιδιοτιμές του πίνακα Α είναι λ1=-3, λ2=-2, λ3=-1. Όλες έχουν αρνητικό πραγματικό
μέρος άρα το σύστημα είναι ευσταθές.
Ο μεταβατικός πίνακας κατάστασης είναι:
όλα τα στοιχεία του μηδενίζονται όταν t->∞, άρα και με αυτό το κριτήριο προκύπτει ότι
το σύστημα είναι ευσταθές.
Ο πίνακας συναρτήσεων μεταφοράς είναι:
Είναι φανερό ότι έχουμε απαλοιφή πόλων μηδενικών διότι σύμφωνα με τον πίνακα
συναρτήσεων μεταφοράς το σύστημα είναι πρώτης τάξης με Χ.Π. p(s)=(s+3)
300
020
001
A
10
01
00
B 101C
Ορισμός Κατάστασης Περιγραφή Σ.Α.Ε στο χώρο κατάστασης Λύση εξισώσεων κατάστασης Ελέγξιμο Σ.Α.Ε Παρατηρήσιμο Σ.Α.Ε Ευστάθεια στο Χώρο Κατάστασης
0D
t
t
t
e
e
e
t
00
00
00
)( 2
3
Φ
DBAICH 1)()( ss
3
10)(s
sH