
ΜΗΤΡΩΟ ΔΥΣΚΑΜΨΙΑΣ ΣΤΟΙΧΕΙΟΥ ΤΥΠΟΥ ΔΟΚΟΥ ΣΤΟ ΕΠΙΠΕΔΟ
74
ΑΝΑΛΥΣΗ ΓΡΑΜΜΙΚΩΝ ΦΟΡΕΩΝ ΜΕ ΜΗΤΡΩΑ Φυλλάδιο Σημειώσεων Νο. 1 ΜΗΤΡΩΟ ΔΥΣΚΑΜΨΙΑΣ ΣΤΟΙΧΕΙΟΥ ΤΥΠΟΥ ΔΟΚΟΥ ΣΤΟ ΕΠΙΠΕΔΟ Μ. Γ. Σφακιανάκης Επίκ. Καθηγητής Πάτρα, Μάρτιος 2015
description
ΜΗΤΡΩΟ ΔΥΣΚΑΜΨΙΑΣ ΣΤΟΙΧΕΙΟΥ ΤΥΠΟΥ ΔΟΚΟΥ ΣΤΟ ΕΠΙΠΕΔΟ
Transcript of ΜΗΤΡΩΟ ΔΥΣΚΑΜΨΙΑΣ ΣΤΟΙΧΕΙΟΥ ΤΥΠΟΥ ΔΟΚΟΥ ΣΤΟ ΕΠΙΠΕΔΟ

ΑΝΑΛΥΣΗ ΓΡΑΜΜΙΚΩΝ ΦΟΡΕΩΝ ΜΕ ΜΗΤΡΩΑ
Φυλλάδιο Σημειώσεων Νο. 1
ΜΗΤΡΩΟ ΔΥΣΚΑΜΨΙΑΣ ΣΤΟΙΧΕΙΟΥ ΤΥΠΟΥ ΔΟΚΟΥ ΣΤΟ ΕΠΙΠΕΔΟ
Μ. Γ. Σφακιανάκης Επίκ. Καθηγητής
Πάτρα, Μάρτιος 2015
ΜΗΤΡΩΟ ΔΥΣΚΑΜΨΙΑΣ ΣΤΟΙΧΕΙΟΥ ΤΥΠΟΥ ΔΟΚΟΥ ΣΤΟ ΕΠΙΠΕΔΟ
1.1 Γενικά
Στο παρόν φυλλάδιο σημειώσεων παρουσιάζεται η διαδικασία κατάστρωσης του μητρώου
δυσκαμψίας στοιχείου τύπου δοκού στο επίπεδο. Αρχικά παρουσιάζεται η περίπτωση της α-
ξονικά απαραμόρφωτης δοκού με μητρώο δυσκαμψίας εκφρασμένο σε τοπικό καρτεσιανό
και δεξιόστροφο σύστημα συντεταγμένων xyz και ακολουθεί η διατύπωσή του σε ανάλογο
απόλυτο σύστημα ΧΥΖ. Τέλος, το εν λόγω μητρώο γενικεύεται με την προσθήκη των αξονι-
κών παραμορφώσεων. Ετσι, θα έχει αποκτηθεί μία πλέον γενικευμένη μορφή του για την επί-
λυση επιπέδων πλαισίων, εξαιρώντας την επιροή των διατμητικών παραμορφώσεων.
Συμβολισμοί:
• Μεμονωμένοι όροι με έντονους (bold) χαρακτήρες αναφέρονται σε μητρώα.
• Οροι με άνω παύλα αναφέρονται σε διανυσματικά μεγέθη του τοπικού συστήματος συντε-
ταγμένων xyz.
• Διανύσματα με διπλά βέλη στα σχήματα αφορούν το διανυσματικό συμβολισμό ροπών και
στροφών, για διάκρισή τους από αυτόν των δυνάμεων και των μεταθέσεων. Εννοείται ότι
είναι κάθετα στο χαρτί και με τη θετική ή αρνητική φορά τους προς τον αναγνώστη, όταν
είναι στις μορφές (+) ή (-), αντίστοιχα με τον κλασικό συμβολισμό (+) ή (-)
που ακολουθείται σε μαθήματα Μηχανικής των Υλικών.
• Επίσης, αναφέρονται στα αγγλικά οι κυριότεροι όροι που απαντώνται στο πρόγραμμα Η/Υ
SAP2000, αναφορικά με το εργαστήριο του μαθήματος.
1.2 Συστήματα συντεταγμένων - προσήμανση και διαγράμματα εσωτερικών εντατικών
μεγεθών
Αναφέρονται τα δύο είδη συστημάτων συντεταγμένων που χρησιμοποιούνται για την περι-
γραφή της γεωμετρίας του συνόλου μίας κατασκευής ή επί μέρους δομικών στοιχείων της στο
πλαίσιο του παρόντος μαθήματος. Περαιτέρω, αναφέρεται και η αντιστοίχιση του κλασικού
τρόπου προσήμανσης δυνάμεων και ροπών και αντίστοιχων μεταθέσεων ή στροφών που ακο-
λουθείται στη μηχανική των υλικών με αυτόν της μητρωϊκής στατικής.
Συστήματα συντεταγμένων μητρωϊκής στατικής γραμμικών φορέων
Ορίζεται ως συνήθης πλαισιωτή κατασκευή (framed structure) αυτή που αποτελείται από
γραμμικά δομικά στοιχεία (δοκούς και υποστυλώματα) (linear elements) και συνήθως φέρει
ως επιφανειακά δομικά στοιχεία επί των δοκών τις πλάκες (slabs). Ως γραμμικά δομικά
στοιχεία, ορίζονται αυτά των οποίων οι διαστάσεις των διατομών τους είναι κατά πολύ
1
μικρότερες από το μήκος τους (π.χ. δοκοί ή υποστυλώματα). Τα σημεία συμβολής των άκρων
των στοιχείων αυτών με τα άκρα άλλων αντίστοιχων στην κατασκευή ορίζονται ως κόμβοι
της κατασκευής (structural nodes). Τα άκρα κάθε γραμμικού μέλους ορίζονται ως κόμβοι αρ-
χής και τέλους του (end nodes).
Απόλυτο ή γενικό σύστημα συντεταγμένων (global system) είναι αυτό στο οποίο περιγράφεται
η γεωμετρία της κατασκευής ως σύνολο. Για τις συνήθεις κτιριακές κατασκευές το σύστημα
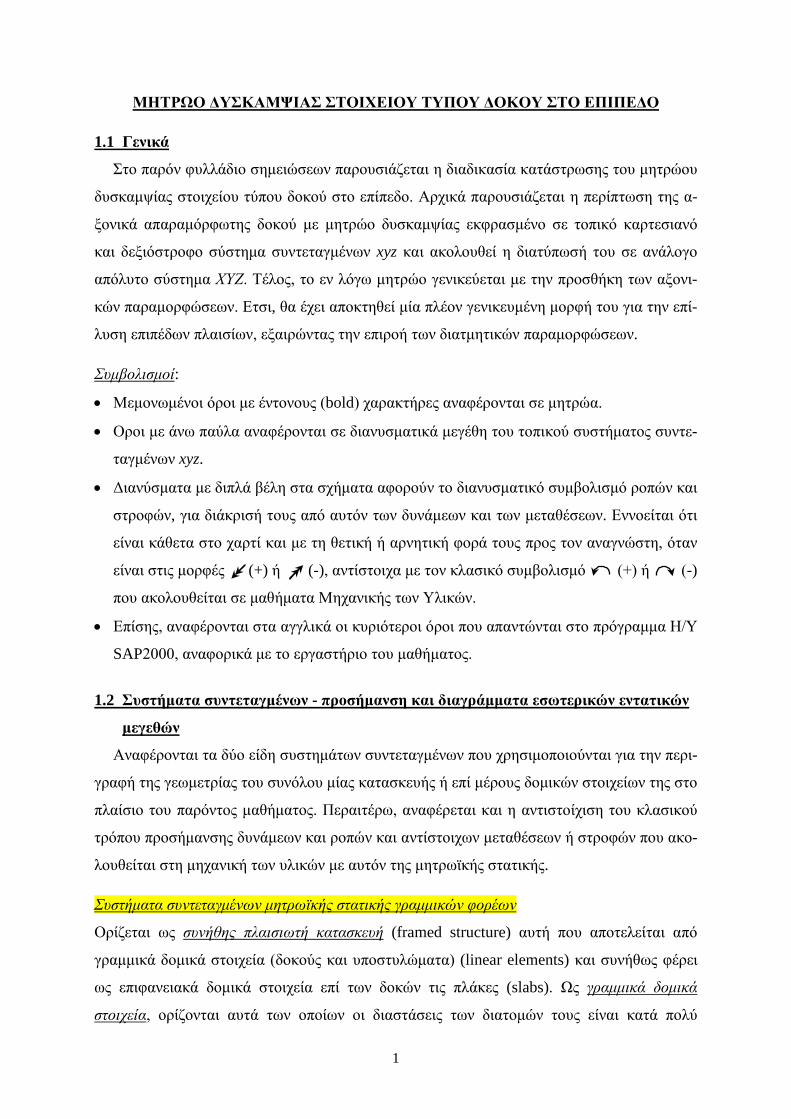
αυτό είναι καρτεσιανό και δεξιόστροφο όπως ορίζεται στο σχήμα 1, βάσει του κανόνα του
δεξιού χεριού. Συμβολίζεται δε με κεφαλαία γράμματα ΧΥΖ ή XGYGZG (G = Global) και η αρ-
Σχ. 1. Ορισμός δεξιόστροφου καρτεσιανού συστήματος συντεταγμένων xyz.
χή των συντεταγμένων του συνήθως επισυνάπτεται σε ακραίο γωνιακό σημείο της κατάσ-
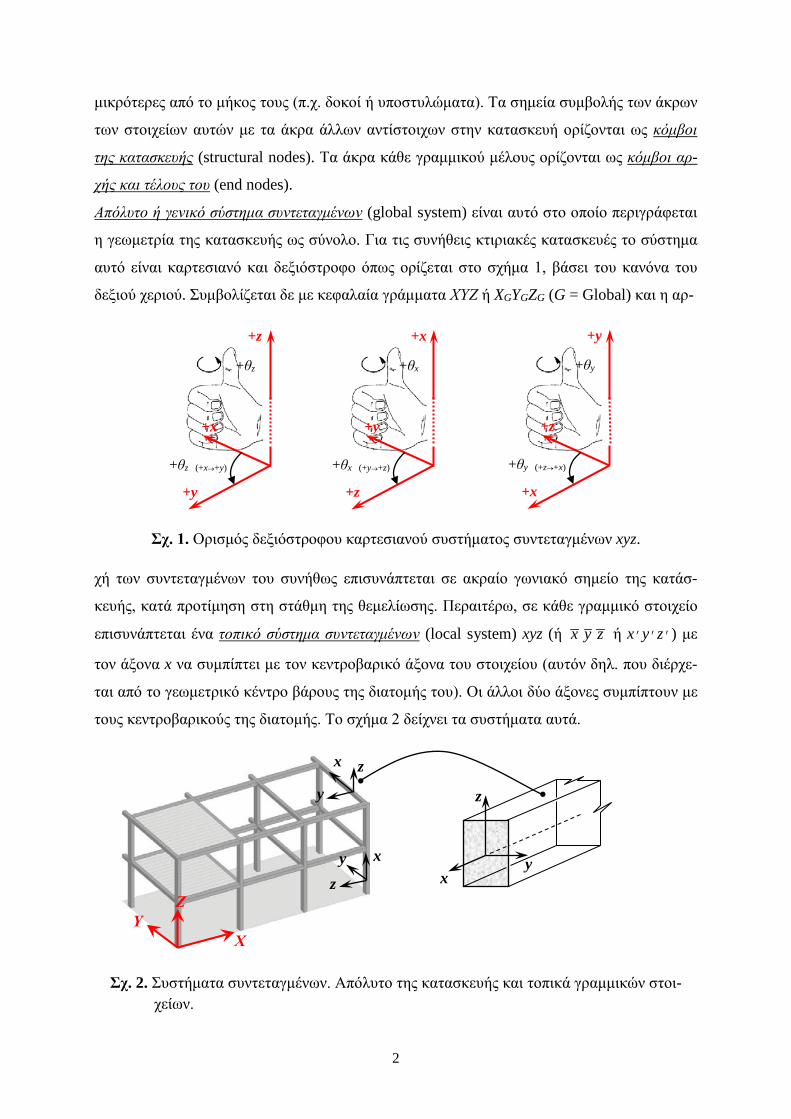
κευής, κατά προτίμηση στη στάθμη της θεμελίωσης. Περαιτέρω, σε κάθε γραμμικό στοιχείο
επισυνάπτεται ένα τοπικό σύστημα συντεταγμένων (local system) xyz (ή x y z ή x’y’z’) με
τον άξονα x να συμπίπτει με τον κεντροβαρικό άξονα του στοιχείου (αυτόν δηλ. που διέρχε-
ται από το γεωμετρικό κέντρο βάρους της διατομής του). Οι άλλοι δύο άξονες συμπίπτουν με
τους κεντροβαρικούς της διατομής. Το σχήμα 2 δείχνει τα συστήματα αυτά.
Σχ. 2. Συστήματα συντεταγμένων. Απόλυτο της κατασκευής και τοπικά γραμμικών στοι- χείων.
+θz (+x→+y)
+x
+y
+z
+θz
+θx (+y→+z)
+y
+z
+x
+θx
+θy (+z→+x)
+z
+x
+y
+θy
z
ΧΥ
Ζ
x
y
yz x
y
z
x
2
Ως προβλήματα επίπεδων κατασκευών ορίζονται αυτά των συνεχών δοκών και επιπέδων
πλαισίων αποτελουμένων από υποστυλώματα και δοκούς, οριζόντιες ή κεκλιμένες. Οι φορτί-
σεις αποτελούνται από δυνάμεις συνεπίπεδες με την κατασκευή και καμπτικές ροπές οι οποί-
ες δημιουργούν στροφές εντός του επιπέδου της κατασκευής. Επομένως, τα διανύσματα των
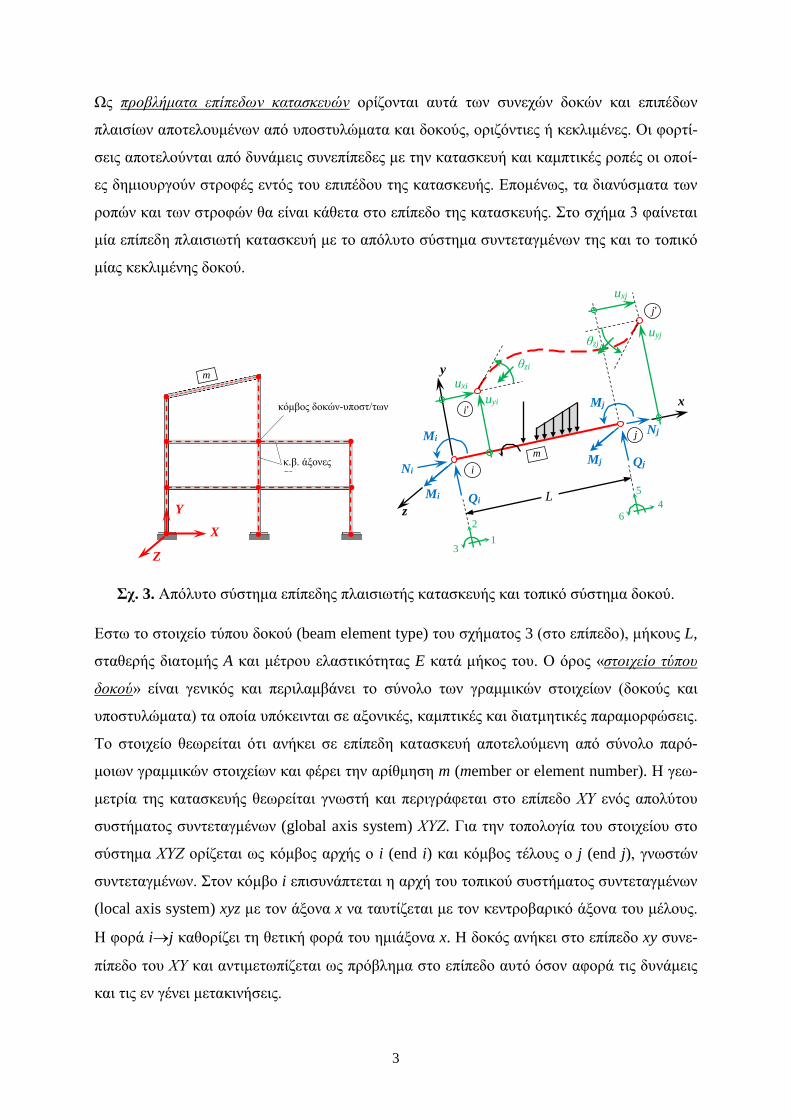
ροπών και των στροφών θα είναι κάθετα στο επίπεδο της κατασκευής. Στο σχήμα 3 φαίνεται
μία επίπεδη πλαισιωτή κατασκευή με το απόλυτο σύστημα συντεταγμένων της και το τοπικό
μίας κεκλιμένης δοκού.
Σχ. 3. Απόλυτο σύστημα επίπεδης πλαισιωτής κατασκευής και τοπικό σύστημα δοκού. Εστω το στοιχείο τύπου δοκού (beam element type) του σχήματος 3 (στο επίπεδο), μήκους L,
σταθερής διατομής A και μέτρου ελαστικότητας E κατά μήκος του. Ο όρος «στοιχείο τύπου
δοκού» είναι γενικός και περιλαμβάνει το σύνολο των γραμμικών στοιχείων (δοκούς και
υποστυλώματα) τα οποία υπόκεινται σε αξονικές, καμπτικές και διατμητικές παραμορφώσεις.
Το στοιχείο θεωρείται ότι ανήκει σε επίπεδη κατασκευή αποτελούμενη από σύνολο παρό-
μοιων γραμμικών στοιχείων και φέρει την αρίθμηση m (member οr element number). Η γεω-
μετρία της κατασκευής θεωρείται γνωστή και περιγράφεται στο επίπεδο ΧΥ ενός απολύτου
συστήματος συντεταγμένων (global axis system) ΧΥΖ. Για την τοπολογία του στοιχείου στο
σύστημα ΧΥΖ ορίζεται ως κόμβος αρχής ο i (end i) και κόμβος τέλους ο j (end j), γνωστών
συντεταγμένων. Στον κόμβο i επισυνάπτεται η αρχή του τοπικού συστήματος συντεταγμένων
(local axis system) xyz με τον άξονα x να ταυτίζεται με τον κεντροβαρικό άξονα του μέλους.
Η φορά i→j καθορίζει τη θετική φορά του ημιάξονα x. H δοκός ανήκει στο επίπεδο xy συνε-
πίπεδο του ΧΥ και αντιμετωπίζεται ως πρόβλημα στο επίπεδο αυτό όσον αφορά τις δυνάμεις
και τις εν γένει μετακινήσεις.
X
Y
Z
κ.β. άξονες X
κόμβος δοκών-υποστ/των x
y
z
m
m i
j
θzi
θzj
uxi uyi
i’
j’uxj
uyj
Qi
Qj Ni
Nj
Mi
Mi
Mj
Mj
1 2
3
4 5
6
L
3

Το στοιχείο θεωρείται ότι δύναται να φέρει επικόμβια φορτία (nodal loads) αξονικών και
τεμνουσών δυνάμεων (axial, shear forces) N και Q, και καμπτικών ροπών (bending mo-
ments) Μ στα άκρα του. Υπό την επιροή των εν λόγω εντατικών μεγεθών, σε συνδυασμό και
με τα τυχόν ομοιόμορφα ή συγκεντρωμένα φορτία που μπορεί να φέρει το στοιχείο κατά
μήκος του, θα ευρεθεί σε νέα θέση i’j’ και μάλιστα με παραμορφωμένο τον άξονά του (ελα-
στική γραμμή). Επομένως, ο κάθε κόμβος του στοιχείου, και αναφορικά με το τοπικό σύστη-
μά του, μπορεί να εκτελέσει δύο μεταθέσεις παράλληλες στους άξονες x και y, τις ux και uy,
και μία στροφή περί τον άξονα z, την θz. Θα έχει δηλαδή ανά κόμβο τρείς βαθμούς ελευθερίας
(degrees of freedom ή dofs στο εξής), δύο μεταθετικούς και έναν στροφικό, άρα συνολικά έξι
βαθμούς ελευθερίας για όλο το στοιχείο.
Oι έξι βαθμοί ελευθερίας του στοιχείου αριθμούνται με μία προκαθορισμένη σειρά που έχει
επικρατήσει (χωρίς ωστόσο να είναι άκρως δεσμευτική), ξεκινώντας πάντα από αυτούς του
κόμβου αρχής i και συνεχίζοντας με αυτούς του κόμβου τέλους j. Σε κάθε κόμβο προηγείται η
αρίθμηση των μεταθετικών βαθμών ελευθερίας (και μάλιστα με τη σειρά πρώτα o κατά x και
μετά o κατά y) και ακολουθεί αυτή του στροφικού. Στο σχήμα 3 παρουσιάζονται οι θετικές
φορές του συνόλου των επικόμβιων εντατικών και παραμορφωσιακών διανυσματικών μεγε-
θών που προαναφέρθηκαν, καθώς και η αρίθμηση των βαθμών ελευθερίας (1, 2, 3, 4, 5, 6).
Oι συμβολισμοί u και θ για τις μεταθέσεις και τις στροφές είναι οι κλασικοί που χρησιμο-
ποιούνται σε μαθήματα Μηχανικής των Υλικών. Στο εξής, το σύνολο των παραμορφωσια-
κών μεγεθών (μεταθέσεις u και στροφές θ) θα συμβολίζεται με τον όρο u ακολουθούμενο σε
θέση δείκτη από τον αριθμό του βαθμού ελευθερίας βάσει της αρίθμησης που προηγήθηκε.
Μεταθέσεις και στροφές θα αναφέρονται πλέον με το γενικό όρο «μετακινήσεις». Aντίστοιχα,
οι αξονικές και τέμνουσες δυνάμεις Ν και Q και οι καμπτικές ροπές Μ θα συμβολίζονται ως
P με ανάλογο δείκτη τον αριθμό του βαθμού ελευθερίας. Ο όρος «δυνάμεις» («loads»)
γενικεύεται πλέον και θα συμπεριλαμβάνει και τις ροπές.
Ετσι, τα μητρώα-διανύσματα των επικόμβιων δυνάμεων, P, και μετακινήσεων, U, θα έχουν
ως ακολούθως.
1 1
2 2
3 3
4 4
5 5
6 6
,
i xi
i yi
i i
j xj
j yj
j j
N uP uQ uP uM P uN uP uQ uP uM P u
ϑ
ϑ
= = = =
P U (1)
4
Τα μητρώα αυτά αφορούν τις εξωτερικά επιβαλλόμενες επικόμβιες δυνάμεις και ροπές (ex-
ternal nodal loads) στα άκρα του στοιχείου και τις προκληθείσες από αυτές μεταθέσεις και
στροφές. Σε κάθε τομή κατά μήκος του στοιχείου οι εν λόγω εξωτερικές δυνάμεις και ροπές
θα πρέπει να ευρίσκονται σε ισορροπία με τις αντίστοιχες εσωτερικές στο σημείο της τομής.
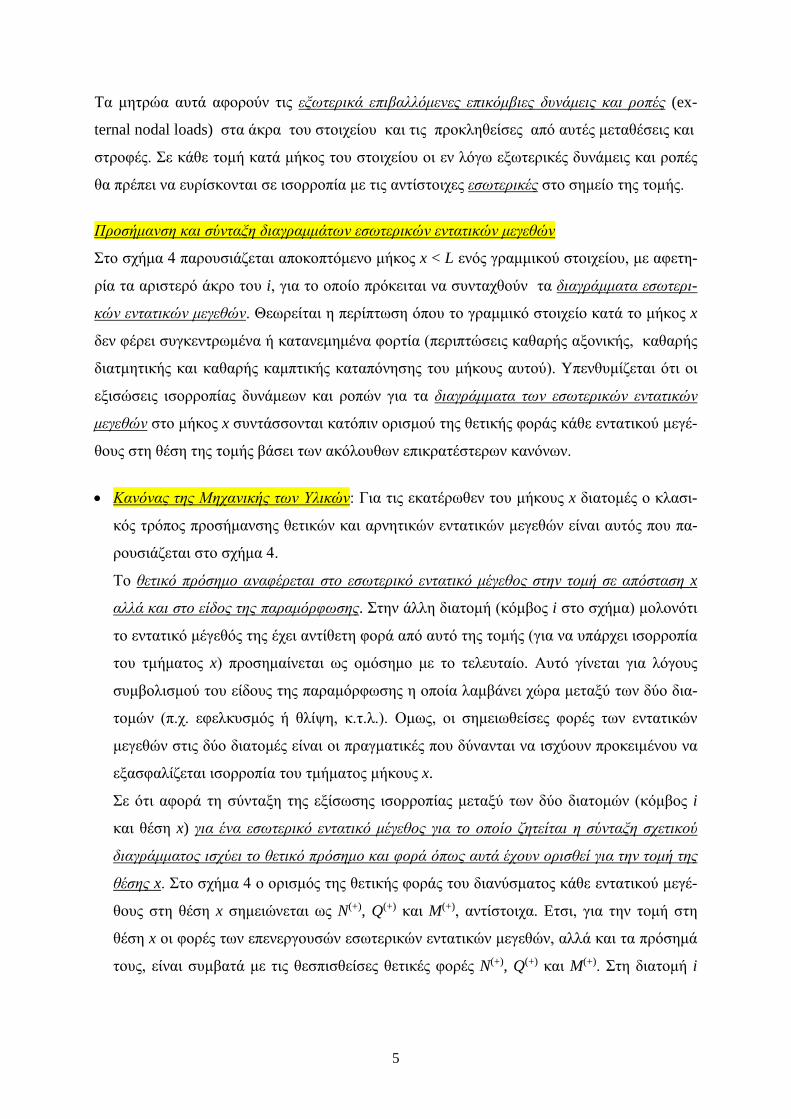
Προσήμανση και σύνταξη διαγραμμάτων εσωτερικών εντατικών μεγεθών
Στο σχήμα 4 παρουσιάζεται αποκοπτόμενο μήκος x < L ενός γραμμικού στοιχείου, με αφετη-
ρία τα αριστερό άκρο του i, για το οποίο πρόκειται να συνταχθούν τα διαγράμματα εσωτερι-
κών εντατικών μεγεθών. Θεωρείται η περίπτωση όπου το γραμμικό στοιχείο κατά το μήκος x
δεν φέρει συγκεντρωμένα ή κατανεμημένα φορτία (περιπτώσεις καθαρής αξονικής, καθαρής
διατμητικής και καθαρής καμπτικής καταπόνησης του μήκους αυτού). Yπενθυμίζεται ότι οι
εξισώσεις ισορροπίας δυνάμεων και ροπών για τα διαγράμματα των εσωτερικών εντατικών
μεγεθών στο μήκος x συντάσσονται κατόπιν ορισμού της θετικής φοράς κάθε εντατικού μεγέ-
θους στη θέση της τομής βάσει των ακόλουθων επικρατέστερων κανόνων.
• Κανόνας της Μηχανικής των Υλικών: Για τις εκατέρωθεν του μήκους x διατομές ο κλασι-
κός τρόπος προσήμανσης θετικών και αρνητικών εντατικών μεγεθών είναι αυτός που πα-
ρουσιάζεται στο σχήμα 4.
Το θετικό πρόσημο αναφέρεται στο εσωτερικό εντατικό μέγεθος στην τομή σε απόσταση x
αλλά και στο είδος της παραμόρφωσης. Στην άλλη διατομή (κόμβος i στο σχήμα) μολονότι
το εντατικό μέγεθός της έχει αντίθετη φορά από αυτό της τομής (για να υπάρχει ισορροπία
του τμήματος x) προσημαίνεται ως ομόσημο με το τελευταίο. Αυτό γίνεται για λόγους
συμβολισμού του είδους της παραμόρφωσης η οποία λαμβάνει χώρα μεταξύ των δύο δια-
τομών (π.χ. εφελκυσμός ή θλίψη, κ.τ.λ.). Ομως, οι σημειωθείσες φορές των εντατικών
μεγεθών στις δύο διατομές είναι οι πραγματικές που δύνανται να ισχύουν προκειμένου να
εξασφαλίζεται ισορροπία του τμήματος μήκους x.
Σε ότι αφορά τη σύνταξη της εξίσωσης ισορροπίας μεταξύ των δύο διατομών (κόμβος i
και θέση x) για ένα εσωτερικό εντατικό μέγεθος για το οποίο ζητείται η σύνταξη σχετικού
διαγράμματος ισχύει το θετικό πρόσημο και φορά όπως αυτά έχουν ορισθεί για την τομή της
θέσης x. Στο σχήμα 4 ο ορισμός της θετικής φοράς του διανύσματος κάθε εντατικού μεγέ-
θους στη θέση x σημειώνεται ως N(+), Q(+) και M(+), αντίστοιχα. Eτσι, για την τομή στη
θέση x οι φορές των επενεργουσών εσωτερικών εντατικών μεγεθών, αλλά και τα πρόσημά
τους, είναι συμβατά με τις θεσπισθείσες θετικές φορές N(+), Q(+) και M(+). Στη διατομή i
5
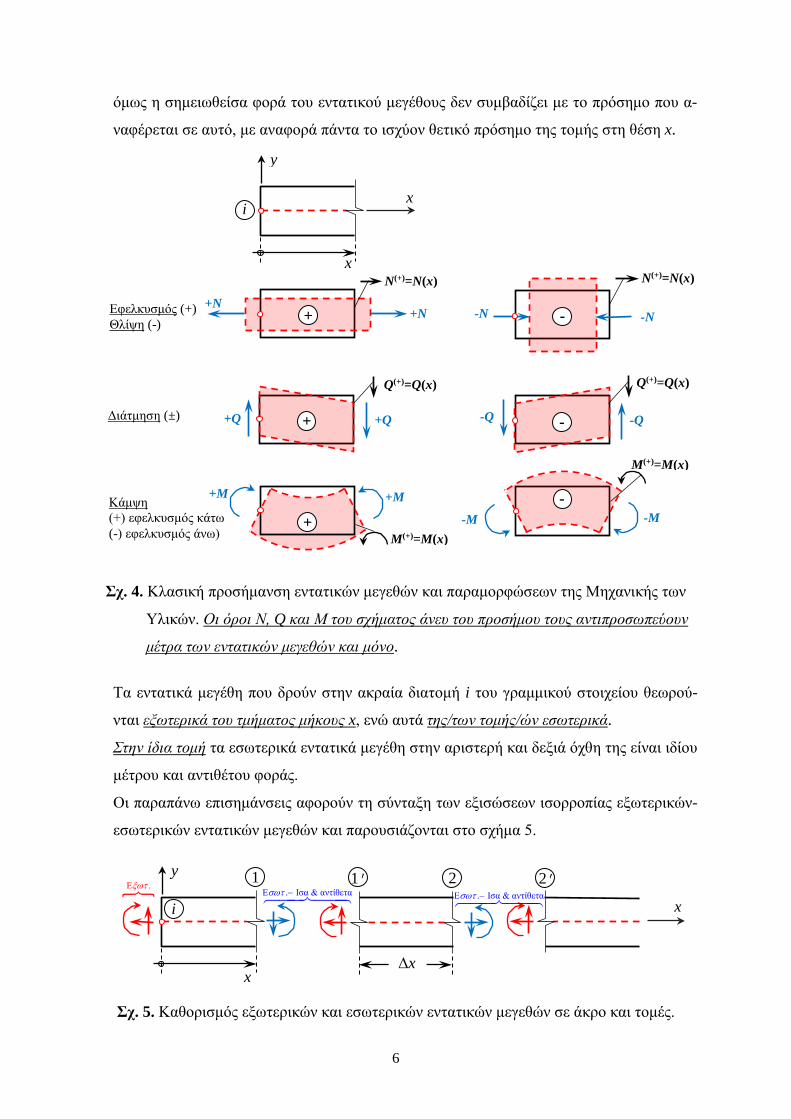
όμως η σημειωθείσα φορά του εντατικού μεγέθους δεν συμβαδίζει με το πρόσημο που α-
ναφέρεται σε αυτό, με αναφορά πάντα το ισχύον θετικό πρόσημο της τομής στη θέση x.
Σχ. 4. Κλασική προσήμανση εντατικών μεγεθών και παραμορφώσεων της Μηχανικής των
Υλικών. Οι όροι Ν, Q και Μ του σχήματος άνευ του προσήμου τους αντιπροσωπεύουν
μέτρα των εντατικών μεγεθών και μόνο.
Τα εντατικά μεγέθη που δρούν στην ακραία διατομή i του γραμμικού στοιχείου θεωρού-
νται εξωτερικά του τμήματος μήκους x, ενώ αυτά της/των τομής/ών εσωτερικά.
Στην ίδια τομή τα εσωτερικά εντατικά μεγέθη στην αριστερή και δεξιά όχθη της είναι ιδίου
μέτρου και αντιθέτου φοράς.
Οι παραπάνω επισημάνσεις αφορούν τη σύνταξη των εξισώσεων ισορροπίας εξωτερικών-
εσωτερικών εντατικών μεγεθών και παρουσιάζονται στο σχήμα 5.
Σχ. 5. Καθορισμός εξωτερικών και εσωτερικών εντατικών μεγεθών σε άκρο και τομές.
+N +N -N -N
+Q +Q -Q -Q
+M +M
-M -M
Εφελκυσμός (+) Θλίψη (-)
Διάτμηση (±)
Κάμψη (+) εφελκυσμός κάτω (-) εφελκυσμός άνω)
+
+
+
-
-
-
x
y
i
x
Q(+)=Q(x)
N(+)=N(x)
M(+)=M(x)
M(+)=M(x)
N(+)=N(x)
Q(+)=Q(x)
x
y
i
x Δx
1 1’ 2 2’
.
ξωτΕ
. Ισα & αντίθετα
σωτΕ −
. Ισα & αντίθετα
σωτΕ −
6
Τελικά, στη σύνταξη των εξισώσεων αυτών τα εντατικά μεγέθη θα ορίζονται με τα μέτρα
τους (άρα κατ’ απόλυτη τιμή) συνοδευόμενα από το κατάλληλο πρόσημο που καθορίζει τη
φορά τους σε σχέση με την ορισθείσα θετική φορά στη θέση x της τομής.
Αυτή είναι η βασική διαφορά σε σχέση με τη μητρωϊκή στατική. Εκεί, τα εντατικά μεγέ-
θη μπορούν να ορίζονται στις εξισώσεις απ’ ευθείας με τα πρόσημά τους, όπως αυτά έχουν
προκύψει από τις σχετικές επιλύσεις (βλ. παρακάτω).
Ετσι, για παράδειγμα, οι εξισώσεις ισορροπίας της αριστερής στήλης των εξωτερικών-
εσωτερικών εντατικών μεγεθών του σχήματος 4 θα είναι:
0 ( ) ( ) 0 ( )
0 ( ) ( ) 0 ( )
0 ( ) ( ) 0 ( )x
N N x N N x N
Q Q x Q Q x Q
M M x M M x M
= ⇔ + − = ⇔ =
= ⇔ + − = ⇔ =
= ⇔ + − = ⇔ =
∑∑∑
(2)
Προκύπτουν δηλαδή φορές του αγνώστου εσωτερικού εντατικού μεγέθους N(x), Q(x) ή
M(x) ίδιες με τις αρχικά υποτεθείσες ως θετικές. Τα μεγέθη (-Ν), (-Q) και (-M) είναι αυτά
της αριστερής διατομής i (τα μέτρα τους) αλλά με αρνητικό πρόσημο λόγω της αρνητικής
φορά τους σε σχέση με αυτή που έχει ορισθεί ως θετική στην τομή της θέσης x.
Αντίστοιχα, για τη δεξιά στήλη των εντατικών μεγεθών του σχήματος 4 θα είναι:
0 ( ) ( ) 0 ( )
0 ( ) ( ) 0 ( )
0 ( ) ( ) 0 ( )x
N N x N N x N
Q Q x Q Q x Q
M M x M M x M
= ⇔ + + = ⇔ = −
= ⇔ + + = ⇔ = −
= ⇔ + + = ⇔ = −
∑∑∑
(3)
Προκύπτουν δηλαδή φορές του αγνώστου εσωτερικού εντατικού μεγέθους N(x), Q(x) ή
M(x) αντίθετες (αρνητικές) σε σχέση με τις αρχικά υποτεθείσες ως θετικές.
Εδώ, τα μεγέθη (+Ν), (+Q) και (+M) είναι αυτά της αριστερής διατομής i αλλά με θετικό
πρόσημο λόγω της θετικής φορά τους σε σχέση με αυτή που ορίσθηκε ως θετική στην το-
μή στη θέση x.
• Κανόνας της μητρωϊκής στατικής: Για τις εκατέρωθεν του μήκους x διατομές θεωρείται ως
θετική φορά των εντατικών μεγεθών αυτή των αξόνων x, y και z.
Βάσει αυτού του κανόνα συντάσσονται οι εξισώσεις ισορροπίας εξωτερικών-εσωτερικών
εντατικών μεγεθών μετά των σχετικών διαγραμμάτων, όπως φαίνεται στο σχήμα 6. Στο
σχήμα αυτό οι όροι Ν, Q και Μ παρουσιάζονται άνευ προσήμου και εννοείται ότι αντιπρο-
7
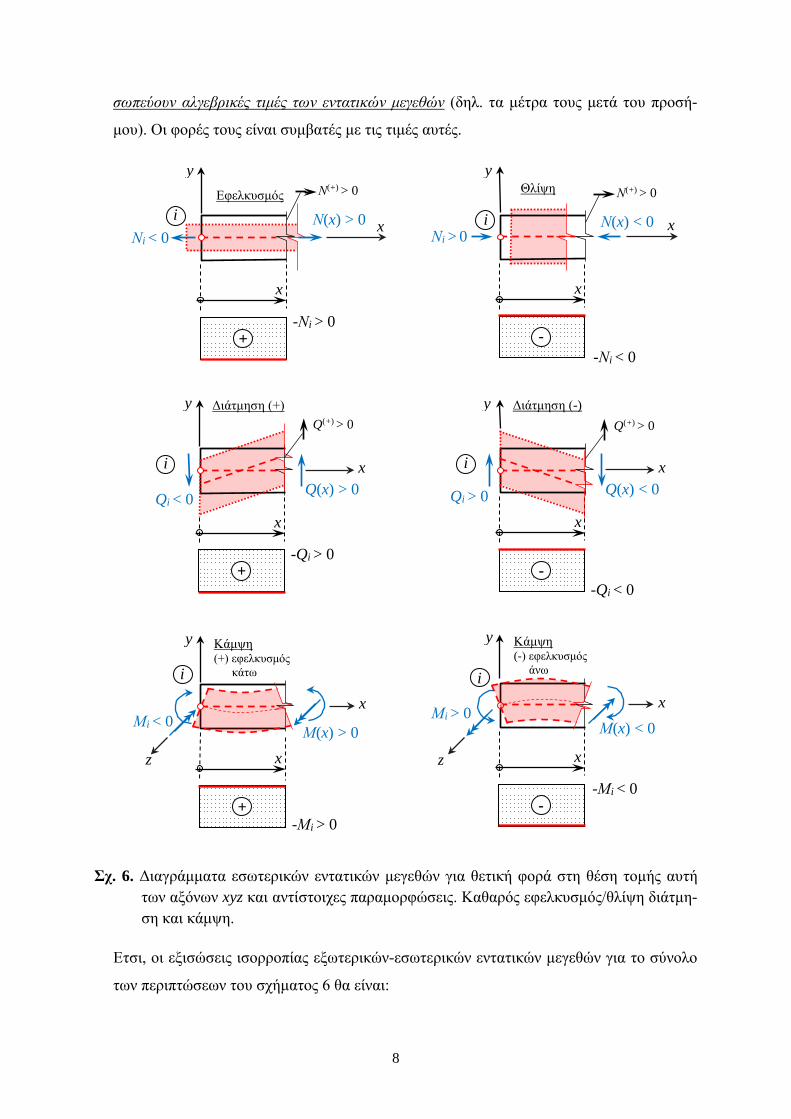
σωπεύουν αλγεβρικές τιμές των εντατικών μεγεθών (δηλ. τα μέτρα τους μετά του προσή-
μου). Οι φορές τους είναι συμβατές με τις τιμές αυτές.
Σχ. 6. Διαγράμματα εσωτερικών εντατικών μεγεθών για θετική φορά στη θέση τομής αυτή
των αξόνων xyz και αντίστοιχες παραμορφώσεις. Καθαρός εφελκυσμός/θλίψη διάτμη-ση και κάμψη.
Ετσι, οι εξισώσεις ισορροπίας εξωτερικών-εσωτερικών εντατικών μεγεθών για το σύνολο
των περιπτώσεων του σχήματος 6 θα είναι:
x
y
i
x
Νi < 0 Ν(x) > 0
+ -Νi > 0
Εφελκυσμός Ν(+) > 0
x
y
i
x
-Νi < 0
Ν(x) < 0
-
Θλίψη
Νi > 0
Ν(+) > 0
x i
x
Q(x) > 0
+ -Qi > 0
Διάτμηση (+) y
x
y
i
x Qi > 0 Q(x) < 0
- -Qi < 0
Διάτμηση (-)
Qi < 0
Q(+) > 0 Q(+) > 0
x
i
x
Μi < 0 Μ(x) > 0
+ -Μi > 0
y Κάμψη (+) εφελκυσμός κάτω
x
y
i
x
Μi > 0 Μ(x) < 0
- -Μi < 0
Κάμψη (-) εφελκυσμός άνω
z z
8
0 ( ) 0 ( ) 0 ή 0 εφ' όσον 0 ή 0
0 ( ) = 0 ( ) 0 ή 0 εφ' όσον 0 ή 0
0 ( ) 0 ( ) 0 ή 0 εφ' όσον 0 ή 0
i i i
i i i
x i i i
N N x N N x N N
Q Q x Q Q x Q Q
M M x M M x M M
= ⇔ + = ⇔ = − > < < >
= ⇔ + ⇔ = − > < < >
= ⇔ + = ⇔ = − > < < >
∑∑∑
(4)
Βάσει λοιπόν του τελικού προκύπτοντος προσήμου από τις σχέσεις (4), θα προκύψουν οι
σωστές φορές του αγνώστου εσωτερικού εντατικού μεγέθους N(x), Q(x) ή M(x) που πρέπει
να ισχύουν προκειμένου να εξασφαλίζεται ισορροπία του τμήματος μήκους x, όπως άλλω-
στε ήταν προφανές.
Σε σχέση με την κλασική προσήμανση της Μηχανικής των Υλικών η μόνη διαφοροποίηση
που προκύπτει στα διαγράμματα εσωτερικών εντατικών μεγεθών είναι αυτή της θετικής
και αρνητικής διάτμησης. Δηλαδή η θετική/αρνητική διάτμηση της Μηχανικής των
Υλικών αντιστοιχεί στην αρνητική/θετική της μητρωϊκής στατικής. Ο λόγος είναι ότι στη
διατομή x ορίζεται ως θετική φορά της Q η προς τα αρνητικά του άξονα y.
Σχεδιαστικά, τα θετικά τμήματα των διαγραμμάτων N(x) και Q(x) είθισται να κείνται προς
την πλευρά του θετικού ημιάξονα y και τα αρνητικά προς την αντίθετη. Για το διάγραμμα
της καμπτικής ροπής M(x) έχει επικρατήσει το ανάποδο.
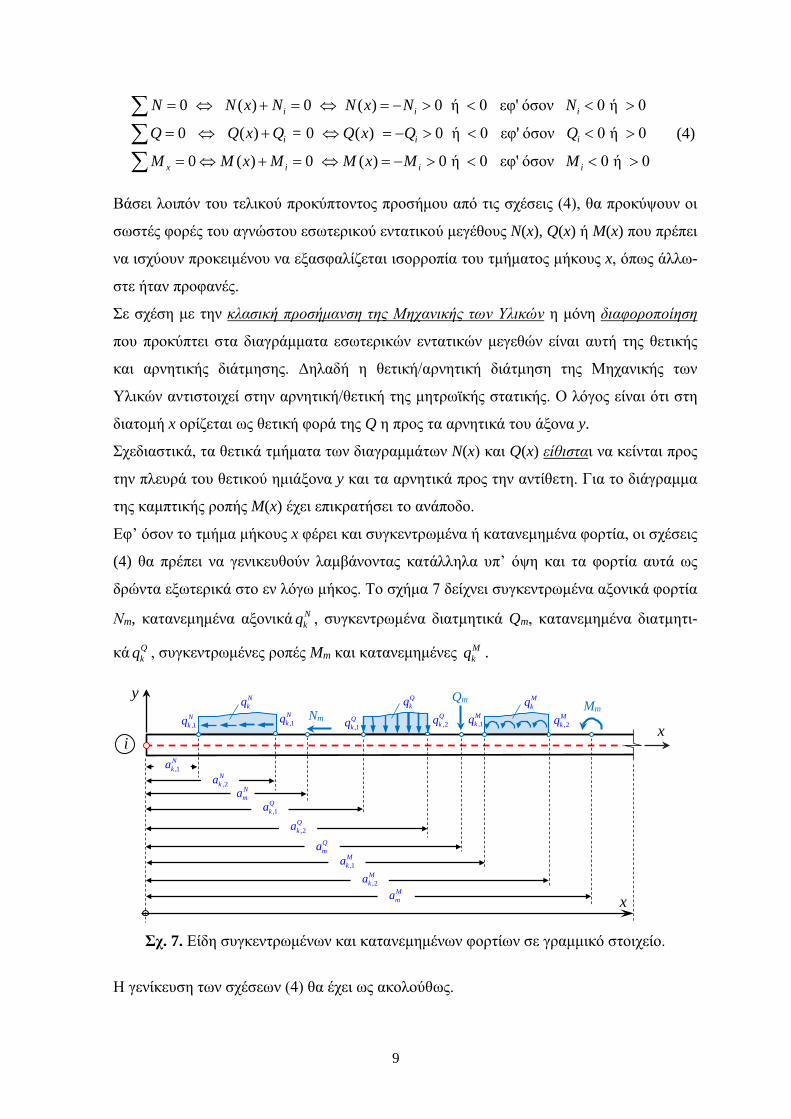
Εφ’ όσον το τμήμα μήκους x φέρει και συγκεντρωμένα ή κατανεμημένα φορτία, οι σχέσεις
(4) θα πρέπει να γενικευθούν λαμβάνοντας κατάλληλα υπ’ όψη και τα φορτία αυτά ως
δρώντα εξωτερικά στο εν λόγω μήκος. Το σχήμα 7 δείχνει συγκεντρωμένα αξονικά φορτία
Νm, κατανεμημένα αξονικά Nkq , συγκεντρωμένα διατμητικά Qm, κατανεμημένα διατμητι-
κά Qkq , συγκεντρωμένες ροπές Mm και κατανεμημένες M
kq .
Σχ. 7. Είδη συγκεντρωμένων και κατανεμημένων φορτίων σε γραμμικό στοιχείο.
Η γενίκευση των σχέσεων (4) θα έχει ως ακολούθως.
Mma
,2Mka
,1Nkq
,1Mka
Qma
,2Qka
,1Qka
,1Nka
x
y
i
x
Nkq
,1Nkq Nm
Qm
,1Mkq
Mkq
,2Mkq
Qkq
,1Qkq ,2
Qkq
Mm
,2Nka
Nma
9
( )
,2
,1
,2
,1
,2
,1
1 1
1 1
1 1 1
0 ( ) ( ) 0
0 ( ) ( ) = 0
0 ( ) ( )
Nk
Nk
Qk
Qk
Mk
Mk
m k x a Ni m ka
m k x a Qi m ka
m k mx a M Qx i m k i m ma
N N x N N q x dx
Q Q x Q Q q x dx
M M x M M q x dx Q x Q x a
≤
≤
≤
= ⇔ + + + =
= ⇔ + + +
= ⇔ + + + − ⋅ − − −
∑ ∑ ∑ ∫
∑ ∑ ∑ ∫
∑ ∑ ∑ ∑∫,2 ,2
,1 ,11 ( ) ( ) = 0
Q Qk k
Q Qk k
k x a x aQ Qk ka a
x q x dx q x xdx≤ ≤
⇔ ⋅ −
∑ ∫ ∫
( )
,2
,1
,2
,1
,2
,1
,2
,1
1 1
1 1
1 1 1
( ) ( )
( ) ( )
( ) ( )
( ) ( )
Nk
Nk
Qk
Qk
Mk
Mk
Qk
Qk
m k x a Ni m ka
m k x a Qi m ka
m k mx a M Qi m k i m ma
x aQ Qk ka
N x N N q x dx
Q x Q Q q x dx
M x M M q x dx Q x Q x a
x q x dx q x xdx
≤
≤
≤
≤
= − − −
⇔ = − − −
= − − − + ⋅ + − +
⋅ −
∑ ∑ ∫
∑ ∑ ∫
∑ ∑ ∑∫,2
,11
Qk
Qk
k x a
a
≤
∑ ∫ ∫
(5)
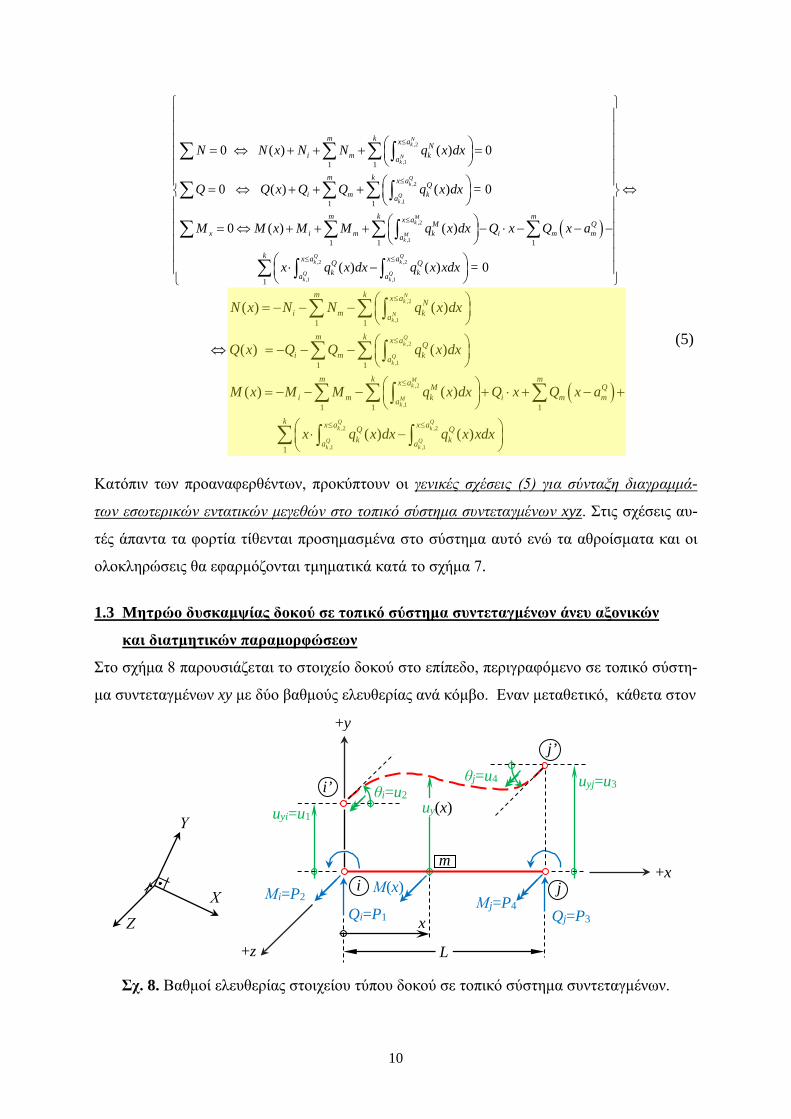
Κατόπιν των προαναφερθέντων, προκύπτουν οι γενικές σχέσεις (5) για σύνταξη διαγραμμά-
των εσωτερικών εντατικών μεγεθών στο τοπικό σύστημα συντεταγμένων xyz. Στις σχέσεις αυ-
τές άπαντα τα φορτία τίθενται προσημασμένα στο σύστημα αυτό ενώ τα αθροίσματα και οι
ολοκληρώσεις θα εφαρμόζονται τμηματικά κατά το σχήμα 7.
1.3 Mητρώο δυσκαμψίας δοκού σε τοπικό σύστημα συντεταγμένων άνευ αξονικών
και διατμητικών παραμορφώσεων
Στο σχήμα 8 παρουσιάζεται το στοιχείο δοκού στο επίπεδο, περιγραφόμενο σε τοπικό σύστη-
μα συντεταγμένων xy με δύο βαθμούς ελευθερίας ανά κόμβο. Εναν μεταθετικό, κάθετα στον
Σχ. 8. Βαθμοί ελευθερίας στοιχείου τύπου δοκού σε τοπικό σύστημα συντεταγμένων.
+x
+z
+y
Μi=P2 Μj=P4 Qi=P1 Qj=P3
uyi=u1
uyj=u3 θi=u2 θj=u4
i j
m
L
x
uy(x) i’
j’
Ζ Χ
Υ
Μ(x)
10

άξονα του στοιχείου, και έναν στροφικό. Λείπει δηλαδή ο μεταθετικός κατά την αξονική
έννοια του στοιχείου. Ετσι, τα μητρώα-διανύσματα των δυνάμεων, P, και μετακινήσεων, U,
θα έχουν ως ακολούθως.
1 1
2 2
3 3
4 4
,
i yi
i i
j yj
j j
Q uP uM P uQ uP uM P u
ϑ
ϑ
= = = =
P U (6)
Τα μητρώα P και U θα συνδέονται μέσω του ζητούμενου μητρώου δυσκαμψίας, Κ, το οποίο
θα είναι 4ης τάξεως (= 2 nodes × 2 dofs/node) δηλαδή διαστάσεων 4×4, με την ακόλουθη
γνωστή σχέση.
11 12 13 141 1
21 22 23 242 2
31 32 33 343 3
41 42 43 444 4
, ? ?ij
k k k kP uk k k kP u
kk k k kP uk k k kP u
= ⋅ ⇔ = ⋅ = ⇒ =
P K U K (7)
Ο προσδιορισμός των στοιχείων kij του μητρώου δυσκαμψίας Κ θα γίνει μέσω απ’ ευθείας
ολοκλήρωσης της διαφορικής εξίσωσης που περιγράφει την ελαστική γραμμή του κεντροβα-
ρικού άξονα της δοκού, δηλαδή της συνάρτησης uy(x).
Για τον προσδιορισμό των στοιχείων kij του μητρώου δυσκαμψίας Κ, η σχέση (7) ξαναγρά-
φεται ως:
1 11 1 12 2 13 3 14 4
2 21 1 22 2 23 3 24 4
3 31 1 32 2 33 3 34 4
4 41 1 42 2 43 3 44 4
P k u k u k u k uP k u k u k u k uP k u k u k u k uP k u k u k u k u
= + + += + + += + + += + + +
(8)
Περαιτέρω, οι σχέσεις (8) μπορούν να γραφούν και στη μορφή:
(1) (2) (3) (4) (1) (2) (3) (4)
1 1 1 1 1 1 11 1 1 12 2 1 13 3 1 14 4(1) (2) (3) (4) (1) (2) (3) (4)
2 2 2 2 2 2 21 1 2 22 2 2 23 3 2 24
όπου , , ,
όπου , , ,
P P P P P P k u P k u P k u P k uP P P P P P k u P k u P k u P k= + + + = = = =
= + + + = = = = 4(1) (2) (3) (4) (1) (2) (3) (4)
3 3 3 3 3 3 31 1 3 32 2 3 33 3 3 34 4(1) (2) (3) (4) (1) (2) (3) (4)
4 4 4 4 4 4 41 1 4 42 2 4 43 3 4
όπου , , ,
όπου , , ,
uP P P P P P k u P k u P k u P k uP P P P P P k u P k u P k u P k= + + + = = = =
= + + + = = = = 44 4u
ή την:
11

(1) (2) (3) (4)1 1 1 1 1
(1) (2) (3) (4)2(1) (2) (3) (4) 2 2 2 2
(1) (2) (3) (4)3 3 3 3 3
(1) (2) (3) (4)4 4 4 4 4
(1)1(1)
2
όπου
P P P P PP P P P PP P P P PP P P P P
PPP
= + + + ⇔ = + + +
P P P P P
(2) (3) (41311 121 1 1
(2) (3)2321 222 2
1 2 3(1) (2) (3)3331 323 3 3
(1) (2) (3)4341 424 4 4
, , ,
kk kP P Pkk kP P
u u ukk kP Pkk kP P P
= ⋅ = ⋅ = ⋅
)14
(4)242
4(4)343
(4)444
kkP
ukPkP
= ⋅
(9)
Δηλαδή, οι σχέσεις (7) ή (8) μπορούν να θεωρηθούν ως αλγεβρικά αθροίσματα των τεσσά-
ρων από τις δεύτερες των σχέσεων (9). Ουσιαστικά, εφαρμόζεται η γνωστή από την ελαστι-
κότητα “αρχή της επαλληλίας”. Περαιτέρω, επιστρατεύεται ο ορισμός (φυσικό νόημα) των
στοιχείων kij του μητρώου Κ:
To στοιχείο kij του μητρώου Κ αντιπροσωπεύει τη δύναμη που ασκείται στο βαθμό ελευθε-
ρίας i λόγω μοναδιαίας μετακίνησης του βαθμού ελευθερίας j όταν όλοι οι λοιποί βαθμοί ε-
λευθερίας είναι δεσμευμένοι-πακτωμένοι (fixed).
Bάσει του ορισμού αυτού, τα στοιχεία της 1ης στήλης του Κ (βλ. και σχ. (9) παρακάτω) θα
αντιπροσωπεύουν τις δυνάμεις (1)1P , (1)
2P , (1)3P , και (1)
4P που ασκούνται στους 4 βαθμούς ελευ-
θερίας του στοιχείου (δείκτες i = 1,2,3,4 των στοιχείων kij) όταν για τον 1ο βαθμό ελευθερίας
(δείκτης j = 1 των στοιχείων kij) δωθεί η τιμή u1 = 1 (ενεργός βαθμός ελευθερίας) και για τους
λοιπούς (δείκτες j = 2,3,4 των στοιχείων kij) οι τιμές u2 = u3 = u4 = 0 (ανενεργοί - δεσμευμένοι
βαθμοί ελευθερίας). Ετσι ορίζεται η περίπτωση φόρτισης (1) (βλ. άνω δείκτες σε παρενθέσεις
στους όρους P(..)). Τελικά, το άθροισμα των σχέσεων (9) αντιπροσωπεύει την επαλληλία των
ακόλουθων τεσσάρων μεμονωμένων περιπτώσεων φόρτισης, όλων τύπου επιβολής γνωστής
μετακίνησης (μοναδιαίας).
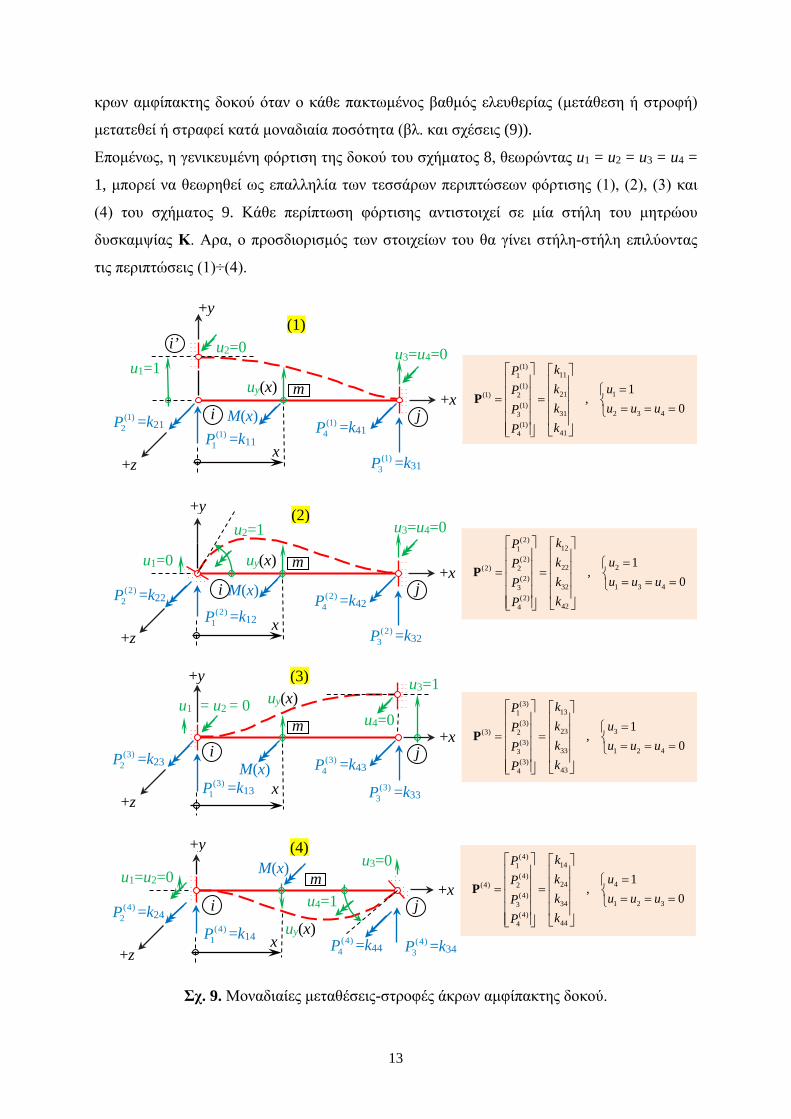
• Περίπτωση (1): u1 = 1 , u2 = u3 = u4 = 0
• Περίπτωση (2): u2 = 1 , u1 = u3 = u4 = 0
• Περίπτωση (3): u3 = 1 , u1 = u2 = u4 = 0
• Περίπτωση (4): u4 = 1 , u1 = u2 = u3 = 0 Η δοκός της κάθε περίπτωσης (k), με k = 1,2,3,4, κατόπιν επιβολής της μοναδιαίας μετακίνη-
σης uk = 1 θα ευρίσκεται σε ισορροπία υπό την επίδραση των δυνάμεων P(k) οι οποίες θα εί-
ναι ίσες με τους όρους kik. Oυσιαστικά δηλ. οι όροι αυτοί θα αφορούν τις αντιδράσεις των ά-
12
κρων αμφίπακτης δοκού όταν ο κάθε πακτωμένος βαθμός ελευθερίας (μετάθεση ή στροφή)
μετατεθεί ή στραφεί κατά μοναδιαία ποσότητα (βλ. και σχέσεις (9)).
Επομένως, η γενικευμένη φόρτιση της δοκού του σχήματος 8, θεωρώντας u1 = u2 = u3 = u4 =
1, μπορεί να θεωρηθεί ως επαλληλία των τεσσάρων περιπτώσεων φόρτισης (1), (2), (3) και
(4) του σχήματος 9. Κάθε περίπτωση φόρτισης αντιστοιχεί σε μία στήλη του μητρώου
δυσκαμψίας Κ. Αρα, ο προσδιορισμός των στοιχείων του θα γίνει στήλη-στήλη επιλύοντας
τις περιπτώσεις (1)÷(4).
Σχ. 9. Μοναδιαίες μεταθέσεις-στροφές άκρων αμφίπακτης δοκού.
+x
+z
+y
(1)2P =k21 (1)
4P =k41 (1)1P =k11
u1=1 u3=u4=0 u2=0
i j
m
x
uy(x)
i’
(1)3P =k31
(1)
(1)111
(1)121(1) 2
(1)2 3 4313
(1)414
1 ,
0
kPukPu u ukP
kP
= = = = = =
P
M(x)
+x
+z
+y
(2)2P =k22 (2)
4P =k42 (2)
1P =k12
u1=0
u3=u4=0 u2=1
i j
m
x
uy(x)
(2)3P =k32
(2) (2)
121(2)
222(2) 2(2)
1 3 4323(2)
424
1 ,
0
kPukPu u ukP
kP
= = = = = =
P
M(x)
+x
+z
+y
(3)2P =k23 (3)
4P =k43 (3)
1P =k13
u3=1 u1 = u2 = 0
u4=0
i j
m
x
uy(x)
(3)3P =k33
(3)
(3)131
(3)23 3(3) 2
(3)33 1 2 43
(3)434
1 ,
0
kPk uPk u u uPkP
= = = = = =
P
M(x)
+x
+z
+y
(4)2P =k24
(4)4P =k44
(4)1P =k14
u3=0 u1=u2=0
u4=1 i j
m
x uy(x)
(4)3P =k34
(4)
(4)141
(4)424(4) 2
(4)1 2 3343
(4)444
1 ,
0
kPukPu u ukP
kP
= = = = = =
P
M(x)
13

Περίπτωση φόρτισης (1) - u1 = 1 , u2 = u3 = u4 = 0
Από τη Μηχανική των Υλικών παρατίθεται η ακόλουθη διαφορική εξίσωση της ελαστικής
γραμμής δοκού από γραμμικά ελαστικό και ομογενές υλικό με μικρές παραμορφώσεις uy(x),
οι οποίες συσχετίζονται μόνο με την καμπτική ροπή M(x) σε θέση x (αγνοείται δηλ. η συμβο-
λή των διατμητικών παραμορφώσεων).
2
2
( )( ) ( )yy
d u xM x u xE I dx
′′= =⋅
(10)
όπου Ι = Ιz η δευτεροβάθμια ροπή αδράνειας ως προς τον άξονα z.
Στο σχήμα 9(1) θεωρείται μία τομή της δοκού στη θέση x και λαμβάνεται το διάγραμμα ελευ-
θέρου σώματος (στο εξής Δ.Ε.Σ.) του αριστερού αποκοπτόμενου τμήματος. Η ισορροπία
ροπών ως προς τη θέση x δίνει:
(1) (1)
2 1 21 11 21 110 ( ) ( ) 0 ( )xM M x P P x M x k k x M x k k xΣ = ⇒ + − ⋅ = + − ⋅ = ⇒ = − + ⋅ (11) Αναφορικά με τα θέματα προσήμανσης που αναφέρθηκαν στην §1.2, η σχέση (11) δίνει τη
ροπή M(x) ως άθροισμα μίας αρνητικής ροπής, της –k21, και μία θετικής, της k11∙x. Τα
πρόσημα των ροπών αυτών είναι σε συμφωνία με αυτά της Μηχανικής των Υλικών και της
μητρωϊκής στατικής, εφ’ όσον είναι k21 > 0. Ετσι, η μέν –k21 εφελκύει το άνω πέλμα της
δοκού στο άκρο i, όπως και έπρεπε, ενώ η k11∙x εφελκύει το κάτω πέλμα της δοκού στη θέση
x.
Η αντικατάσταση της (11) στη (10) και κατόπιν μίας ολοκλήρωσης δίνει τη συνάρτηση της
κλίσης της ελαστικής γραμμής, θ(x).
2
21 11 21 11 1
( )1 1( ) ( ) ( ) ( )2
yy y
du x xu x k k x u x x k x k CE I dx E I
ϑ ∫′′ ′= − + ⋅ → = = = − + + ⋅ ⋅
(12)
Μία επί πλέον ολκλήρωση της (12) δίνει τη συνάρτηση της ελαστικής γραμμής του κεντρο-
βαρικού άξονα της δοκού, uy(x).
2 3
21 11 1 21( )
2 6yx xu x k k C x C
E I
= − + + ⋅ + ⋅ (13)
Οι όροι C1 και C2 στις (12) και (13) αποτελούν σταθερές ολοκλήρωσης. Οι σχέσεις αυτές
αποτελούν σύστημα δύο εξισώσεων με τέσσερις αγνώστους, τους όρους k11 και k21 και τις
σταθερές ολοκλήρωσης C1 και C2. Για την επίλυσή του χρησιμοποιούνται οι ακόλουθες
συνοριακές συνθήκες των άκρων i (x=0) και j (x=L) της δοκού (βλ. σχ. 9(1)).
14

31
42
( ) 0(0) 10 ,
( ) 0(0) 0y yjy yi
ji
u L u uu u ux x L
L uu ϑ ϑϑ ϑ= = == = =
= ⇒ = ⇒ = = == = = (14)
Εφαρμόζοντας το 1ο σέτ των (14) (για x = 0) στo σύστημα των (12) και (13), προκύπτει: C1 = 0 , C2 = 1 (15) Λόγω των (15), οι (12) και (13) ξαναγράφονται στη μορφή:
2 2 3
21 11 21 111 1( ) , ( ) 1
2 2 6yx x xx k x k u x k k
E I EIϑ
= − + = − + + ⋅
(16)
Η εφαρμογή του 2ου σέτ των (14) (για x = L) στο σύστημα των (16) δίνει:
11 213 2
12 6 , E I E Ik kL L⋅ ⋅
= = (17)
Εως εδώ έχουν προσδιορισθεί οι όροι k11 και k21 του μητρώου Κ και οι οποίοι αφορούν τις
αντιδράσεις του άκρου i της δοκού. Αντίστοιχα, οι όροι k31 και k41 αφορούν τις αντιδράσεις
του άκρου j της δοκού και μπορούν πλέον να προσδιορισθούν από ισορροπία του συνόλου
της δοκού (αντίστοιχο Δ.Ε.Σ. βλ. στο σχ. 9(1)). Οι σχετικές εξισώσεις ισορροπίας είναι:
11 31 31 11
21 11 41 41 11 21
0 0
0 0y
j
F k k k k
M k k L k k k L k
= ⇒ + = ⇔ = −
= ⇒ − ⋅ + = ⇔ = ⋅ −
∑∑
(18)
Λόγω των (12) οι (13) δίνουν:
31 413 2
12 6 , E I E Ik kL L⋅ ⋅
= − = (19)
Οι εξισώσεις (16) της κλίσης της ελαστικής γραμμής θ(x) και της ελαστικής γραμμής uy(x)
διαμορφώνονται λόγω των (17) και (19) στην τελική τους μορφή.
2 3
2( ) 6 1 , ( ) 1 3 2yx x x xx u xL L L L
ϑ = − − = − +
(20)
Η δεύτερη των (20) ορίζεται επί πλέον ως η συνάρτηση σχήματος (shape function) N1(x) η
οποία δίνει τη μορφή της ελαστικής γραμμής της δοκού όταν u1 = 1 και u2 = u3 = u4 = 0. H
συνάρτηση αυτή θα χρησιμοποιηθεί στη σειρά μαθημάτων της Ανάλυσης με Πεπερασμένα
Στοιχεία.
15

2 3
1( ) 1 3 2x xN xL L
= − +
(21)
Η αντικατάσταση των (17) και (19) στην (7) δίνει, έως εδώ, την 1η στήλη του μητρώου Κ.
3
11
221
313
41
2
12
6
12
6
EIL
k EIk Lk EI
LkEIL
× × × × × × × × × × × × = = × × × − × × × × × ×
× × ×
K (22)
Η μεθοδολογία της παρούσας περίπτωσης φόρτισης επαναλαμβάνεται πανομοιότυπα για τον
προσδιορισμό των επόμενων τριών στηλών του πίνακα Κ (περιπτώσεις φόρτισης (2), (3) και
(4)).
Περίπτωση φόρτισης (2) - u2 = 1 , u1 = u3 = u4 = 0
Η ισορροπία ροπών ως προς τη θέση x της τομής για το αριστερό αποκοπτόμενο τμήμα της
δοκού του σχήματος 9(2) δίνει:
(2) (2)
2 1 22 12 22 120 ( ) ( ) 0 ( )xM M x P P x M x k k x M x k k xΣ = ⇒ + − ⋅ = + − ⋅ = ⇒ = − + ⋅ (23) Με αντικατάσταση της (23) στη (10) και κατόπιν δύο διαδοχικών ολοκληρώσεων, λαμβάνο-
νται οι συναρτήσεις της ελαστικής γραμμής και της κλίσης της, uy(x) και θ(x).
2
22 12 1
2 3
22 12 1 2
1( )2
1( )2 6y
xx k x k CE I
x xu x k k C x CE I
ϑ
= − + + ⋅
= − + + ⋅ + ⋅
(24)
Οι συνοριακές συνθήκες στα άκρα της δοκού για την επίλυση του συστήματος των (24) ως
προς τους αγνώστους k12, k22, C1 και C2 είναι:
31
42
( ) 0(0) 00 ,
( ) 0(0) 1y yjy yi
ji
u L u uu u ux x L
L uu ϑ ϑϑ ϑ= = == = =
= ⇒ = ⇒ = = == = = (25)
Με τις συνθήκες αυτές οι τέσσερις άγνωστοι του συστήματος προκύπτουν ως:
16
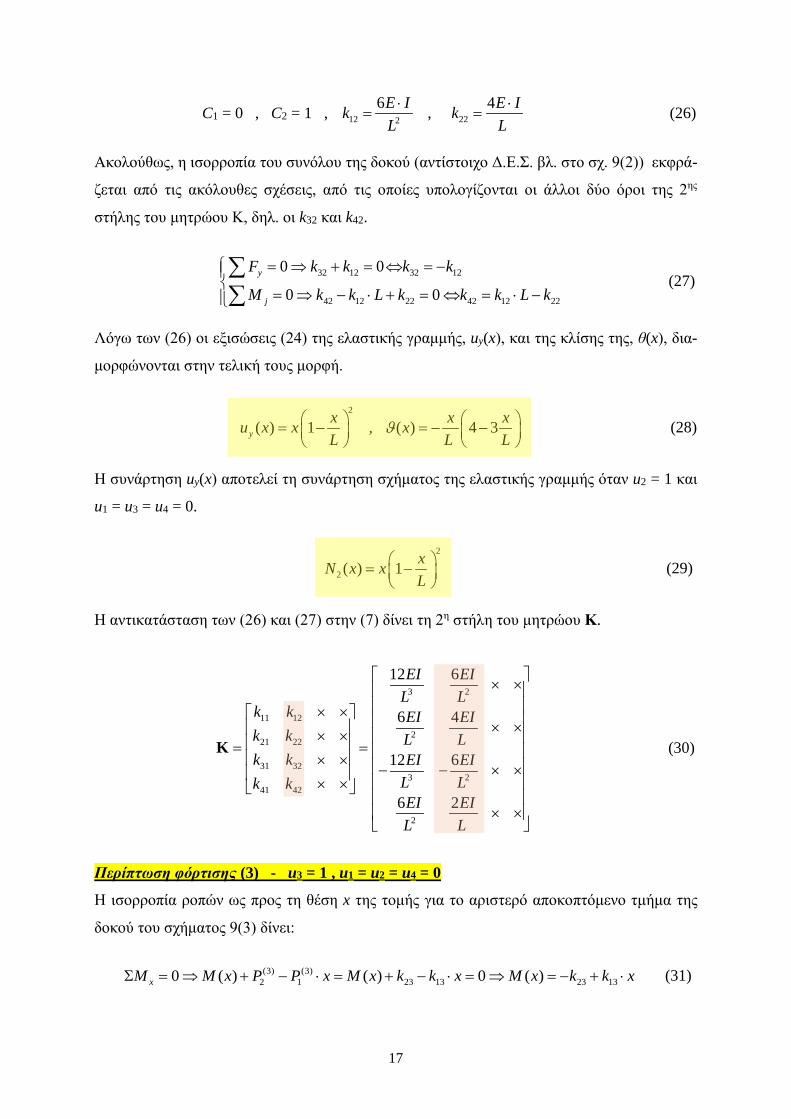
C1 = 0 , C2 = 1 , 12 222
6 4 , E I E Ik kL L⋅ ⋅
= = (26)
Ακολούθως, η ισορροπία του συνόλου της δοκού (αντίστοιχο Δ.Ε.Σ. βλ. στο σχ. 9(2)) εκφρά-
ζεται από τις ακόλουθες σχέσεις, από τις οποίες υπολογίζονται οι άλλοι δύο όροι της 2ης
στήλης του μητρώου Κ, δηλ. οι k32 και k42.
32 12 32 12
42 12 22 42 12 22
0 0
0 0y
j
F k k k k
M k k L k k k L k
= ⇒ + = ⇔ = −
= ⇒ − ⋅ + = ⇔ = ⋅ −
∑∑
(27)
Λόγω των (26) οι εξισώσεις (24) της ελαστικής γραμμής, uy(x), και της κλίσης της, θ(x), δια-
μορφώνονται στην τελική τους μορφή.
2
( ) 1 , ( ) 4 3yx x xu x x xL L L
ϑ = − = − −
(28)
Η συνάρτηση uy(x) αποτελεί τη συνάρτηση σχήματος της ελαστικής γραμμής όταν u2 = 1 και
u1 = u3 = u4 = 0.
2
2 ( ) 1 xN x xL
= −
(29)
Η αντικατάσταση των (26) και (27) στην (7) δίνει τη 2η στήλη του μητρώου Κ.
3 2
11 12
221 22
31 323 2
41 42
2
12 6
6 4
12 6
6 2
EI EIL L
k k EI EIk k L Lk k EI EI
L Lk kEI EIL L
× × × × × × × × = = × × − − × × × ×
× ×
K (30)
Περίπτωση φόρτισης (3) - u3 = 1 , u1 = u2 = u4 = 0
Η ισορροπία ροπών ως προς τη θέση x της τομής για το αριστερό αποκοπτόμενο τμήμα της
δοκού του σχήματος 9(3) δίνει:
(3) (3)
2 1 23 13 23 130 ( ) ( ) 0 ( )xM M x P P x M x k k x M x k k xΣ = ⇒ + − ⋅ = + − ⋅ = ⇒ = − + ⋅ (31)
17

Με αντικατάσταση της (31) στη (10) και κατόπιν δύο διαδοχικών ολοκληρώσεων, λαμβάνο-
νται οι συναρτήσεις της ελαστικής γραμμής και της κλίσης της, uy(x) και θ(x).
2
23 13 1
2 3
23 13 1 2
1( )2
1( )2 6y
xx k x k CE I
x xu x k k C x CE I
ϑ
= − + + ⋅
= − + + ⋅ + ⋅
(32)
Οι συνοριακές συνθήκες στα άκρα της δοκού για την επίλυση του συστήματος των (32) ως
προς τους αγνώστους k13, k23, C1 και C2 είναι:
31
42
( ) 1(0) 00 ,
( ) 0(0) 0y yjy yi
ji
u L u uu u ux x L
L uu ϑ ϑϑ ϑ= = == = =
= ⇒ = ⇒ = = == = = (33)
Με τις συνθήκες αυτές οι τέσσερις άγνωστοι του του συστήματος προκύπτουν ως:
C1 = C2 = 0 , 13 233 2
12 6 , E I E Ik kL L⋅ ⋅
= − = − (34)
Ακολούθως, η ισορροπία του συνόλου της δοκού (αντίστοιχο Δ.Ε.Σ. βλ. στο σχ. 9(3)) εκφρά-
ζεται από τις ακόλουθες σχέσεις, από τις οποίες υπολογίζονται οι άλλοι δύο όροι της 3ης
στήλης του μητρώου Κ, δηλ. οι k33 και k43.
33 13 33 13
43 13 23 43 13 23
0 0
0 0y
j
F k k k k
M k k L k k k L k
= ⇒ + = ⇔ = −
= ⇒ − ⋅ + = ⇔ = ⋅ −
∑∑
(35)
Λόγω των (34) οι εξισώσεις (32) της ελαστικής γραμμής, uy(x), και της κλίσης της, θ(x), δια-
μορφώνονται στην τελική τους μορφή.
2
2( ) 3 2 , ( ) 6 1yx x x xu x xL L L L
ϑ = − = −
(36)
Η συνάρτηση uy(x) αποτελεί τη συνάρτηση σχήματος της ελαστικής γραμμής όταν u3 = 1 και
u1 = u2 = u4 = 0.
2
3 ( ) 3 2x xN xL L
= −
(37)
Η αντικατάσταση των (34) και (35) στην (7) δίνει την 3η στήλη του μητρώου Κ.
18
3 2 3
11 12 13
2 221 22 23
31 32 333 2 3
41 42 43
2 2
12 6 12
6 4 6
12 6 12
6 2 6
EI EI EIL L L
k k k EI EI EIk k k L L Lk k k EI EI EI
L L Lk k kEI EI EIL L L
− × × − × × = = × − − × ×
− ×
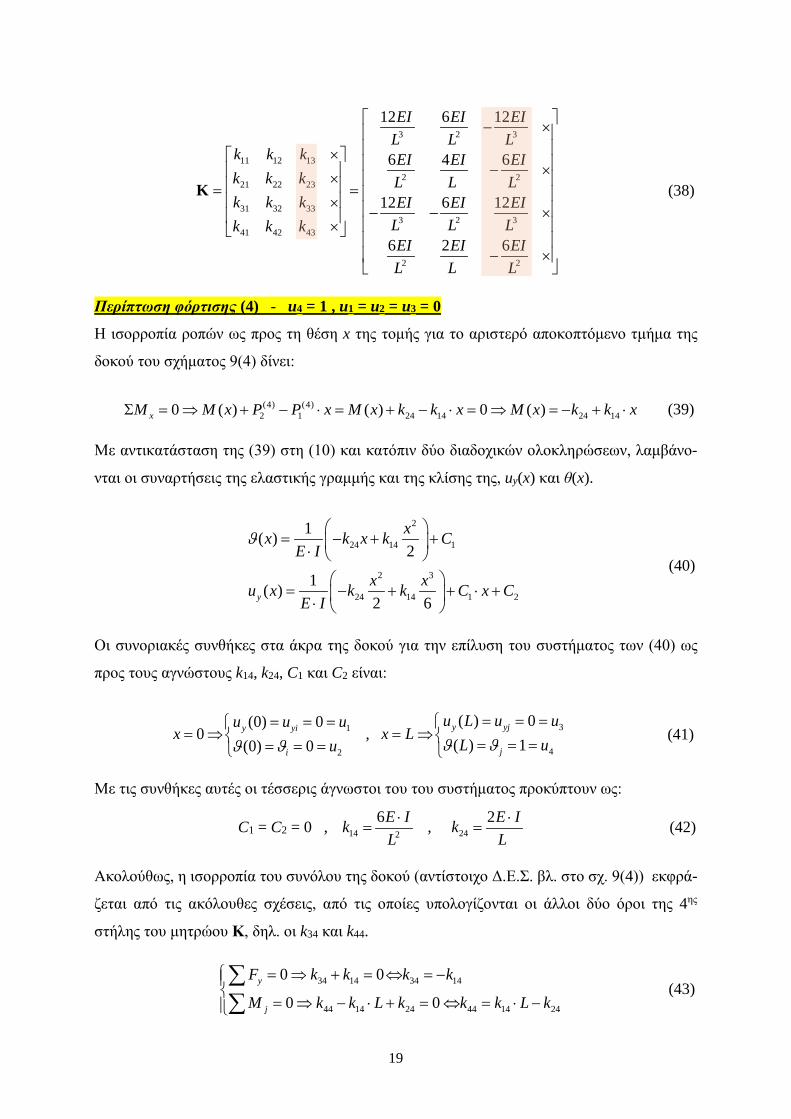
K (38)
Περίπτωση φόρτισης (4) - u4 = 1 , u1 = u2 = u3 = 0
Η ισορροπία ροπών ως προς τη θέση x της τομής για το αριστερό αποκοπτόμενο τμήμα της
δοκού του σχήματος 9(4) δίνει:
(4) (4)
2 1 24 14 24 140 ( ) ( ) 0 ( )xM M x P P x M x k k x M x k k xΣ = ⇒ + − ⋅ = + − ⋅ = ⇒ = − + ⋅ (39) Με αντικατάσταση της (39) στη (10) και κατόπιν δύο διαδοχικών ολοκληρώσεων, λαμβάνο-
νται οι συναρτήσεις της ελαστικής γραμμής και της κλίσης της, uy(x) και θ(x).
2
24 14 1
2 3
24 14 1 2
1( )2
1( )2 6y
xx k x k CE I
x xu x k k C x CE I
ϑ
= − + + ⋅
= − + + ⋅ + ⋅
(40)
Οι συνοριακές συνθήκες στα άκρα της δοκού για την επίλυση του συστήματος των (40) ως
προς τους αγνώστους k14, k24, C1 και C2 είναι:
31
42
( ) 0(0) 00 ,
( ) 1(0) 0y yjy yi
ji
u L u uu u ux x L
L uu ϑ ϑϑ ϑ= = == = =
= ⇒ = ⇒ = = == = = (41)
Με τις συνθήκες αυτές οι τέσσερις άγνωστοι του του συστήματος προκύπτουν ως:
C1 = C2 = 0 , 14 242
6 2 , E I E Ik kL L⋅ ⋅
= = (42)
Ακολούθως, η ισορροπία του συνόλου της δοκού (αντίστοιχο Δ.Ε.Σ. βλ. στο σχ. 9(4)) εκφρά-
ζεται από τις ακόλουθες σχέσεις, από τις οποίες υπολογίζονται οι άλλοι δύο όροι της 4ης
στήλης του μητρώου Κ, δηλ. οι k34 και k44.
34 14 34 14
44 14 24 44 14 24
0 0
0 0y
j
F k k k k
M k k L k k k L k
= ⇒ + = ⇔ = −
= ⇒ − ⋅ + = ⇔ = ⋅ −
∑∑
(43)
19
Λόγω των (42) οι εξισώσεις (40) της ελαστικής γραμμής, uy(x), και της κλίσης της, θ(x), δια-
μορφώνονται στην τελική τους μορφή.
2
( ) 1 , ( ) 2 3yx x x xu x xL L L L
ϑ = − = − −
(44)
Η συνάρτηση uy(x) αποτελεί τη συνάρτηση σχήματος της ελαστικής γραμμής όταν u4 = 1 και
u1 = u2 = u3 = 0.
2
4 ( ) 1x xN xL L == −
(45)
Η αντικατάσταση των (42) και (43) στην (7) δίνει την 3η στήλη του μητρώου Κ.
3 2 3 2
11 12 13 14
2 221 22 23 24
31 32 33 343 2 3 2
41 42 43 44
2 2
12 6 12 6
6 4 6 2
12 6 12 6
6 2 6 4
EI EI EI EIL L L L
k k k k EI EI EI EIk k k k L L L Lk k k k EI EI EI EI
L L L Lk k k kEI EI EI EIL L L L
− − = = − − −
−
K (46)
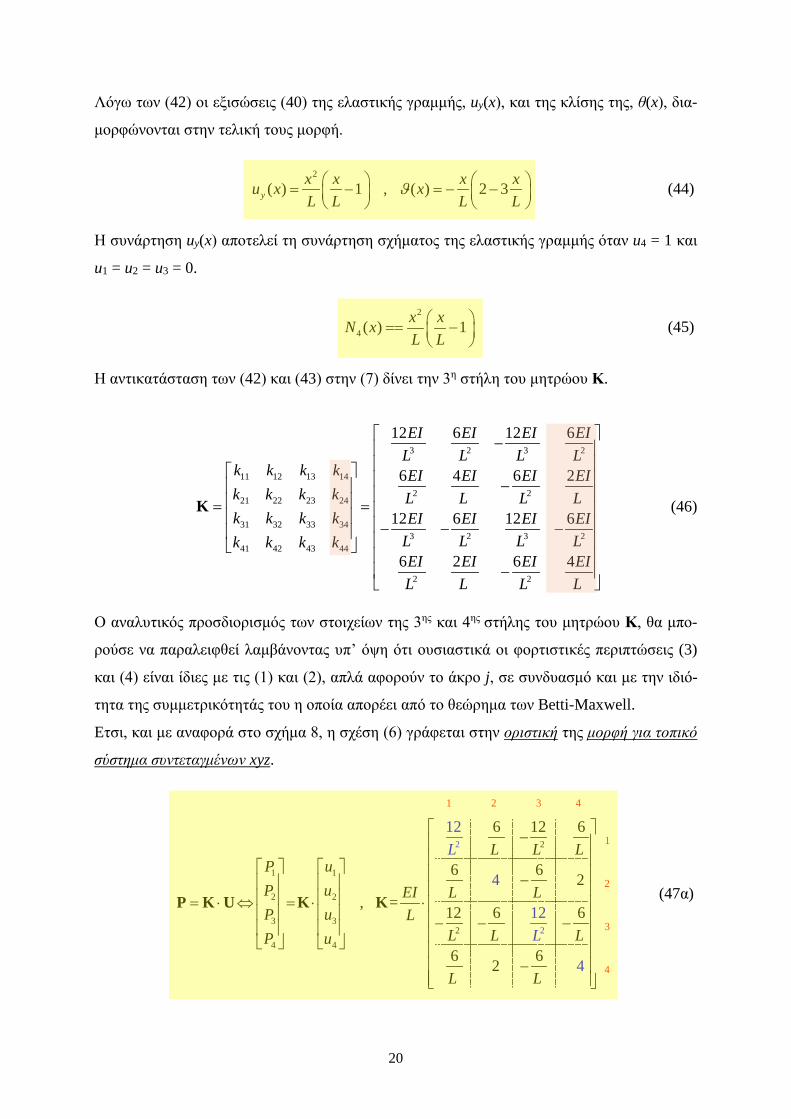
Ο αναλυτικός προσδιορισμός των στοιχείων της 3ης και 4ης στήλης του μητρώου Κ, θα μπο-
ρούσε να παραλειφθεί λαμβάνοντας υπ’ όψη ότι ουσιαστικά οι φορτιστικές περιπτώσεις (3)
και (4) είναι ίδιες με τις (1) και (2), απλά αφορούν το άκρο j, σε συνδυασμό και με την ιδιό-
τητα της συμμετρικότητάς του η οποία απορέει από το θεώρημα των Betti-Maxwell.
Eτσι, και με αναφορά στο σχήμα 8, η σχέση (6) γράφεται στην οριστική της μορφή για τοπικό
σύστημα συντεταγμένων xyz.
1 1
2 2
3 3
4 4
1 2 3 4
P uP uP uP u
= ⋅ ⇔ = ⋅
P K U K2
2
2
2
1
2
3
4
6 12 6
6 6 2 , = 12 6 6
6 62
12
4
12
4
1
1
1
1
L L L
EI L LL
L L L
L L
L
L
L
L
L
L
− − ⋅ − − −
−
K (47α)
20
Επισήμανση: Τα διαφορετικά πρόσημα στο μητρώο Κ των σημειώσεων του καθ. κ. Δ. Μπέσκου που σας έχουν διανεμηθεί (βλ. μάθ. 5, σελ. 5, σχ. (14)) οφείλονται στη διαφορετική θεώρηση των θετικών φορών των ροπών, κατά παλαιότερη προσήμανση, που ακολουθείται στις σημειώσεις αυτές. Στο εξής, στο πλαίσιο του μαθήματος θα χρησιμοποιείται η μορφή του μητρώου των παρόντων σημειώσεων του διδάσκοντα. Αυτό ισχύει και για τα επόμενα που ακολουθούν.
Το μητρώο της σχέσης (47α) μπορεί να χρησιμοποιείται για γραμμικά μέλη κατασκευών τα
οποία δεν φέρουν αξονικά φορτία, άμμεσα ή έμμεσα. Κυρίως, μπορεί να χρησιμοποιείται σε
προβλήματα συνεχών δοκών οι οποίες φέρουν συγκεντρωμένα ή κατανεμημένα φορτία κάθε-
τα στον άξονά τους και συγκεντρωμένες ή κατανεμημένες καμπτικές ροπές. Στα προβλήματα
αυτά τα τοπικά συστήματα των δοκών ταυτίζονται με το απόλυτο, κατά τα αναφερόμενα
στην επόμενη παράγραφο.
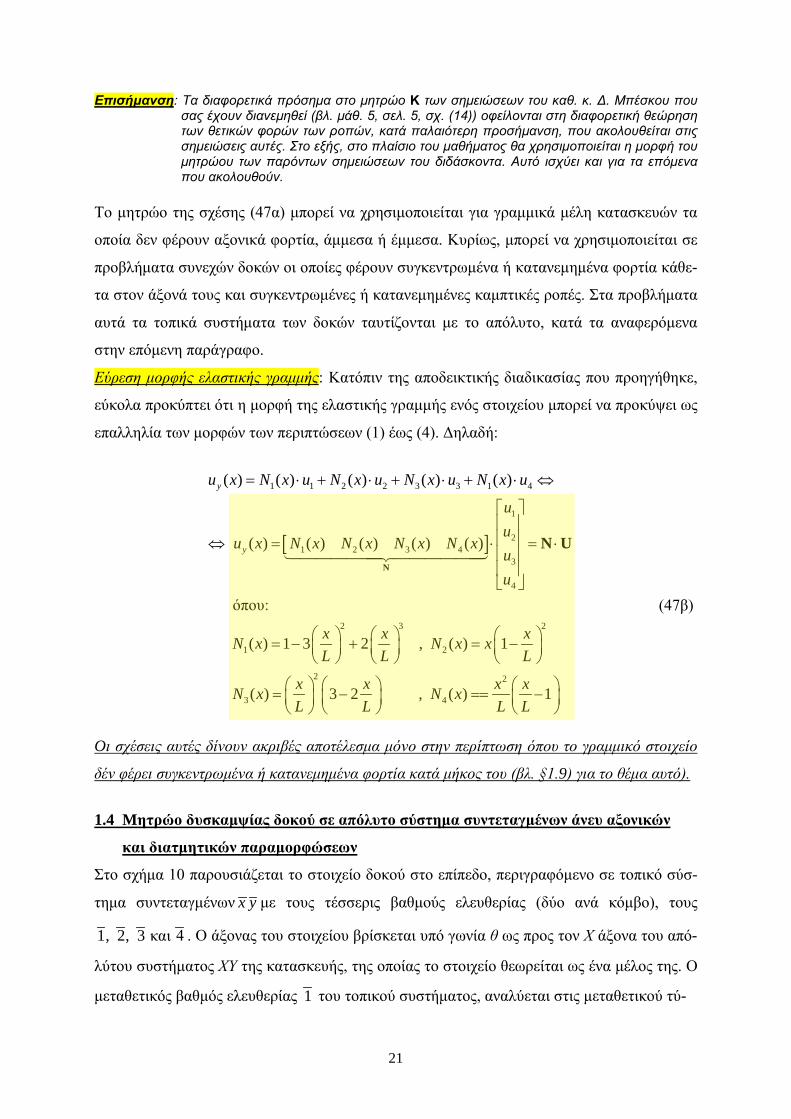
Εύρεση μορφής ελαστικής γραμμής: Κατόπιν της αποδεικτικής διαδικασίας που προηγήθηκε,
εύκολα προκύπτει ότι η μορφή της ελαστικής γραμμής ενός στοιχείου μπορεί να προκύψει ως
επαλληλία των μορφών των περιπτώσεων (1) έως (4). Δηλαδή:
[ ]
1 1 2 2 3 3 1 4
1
21 2 3 4
3
4
2 3 2
1 2
3
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
όπου:
( ) 1 3 2 , ( ) 1
( )
y
y
u x N x u N x u N x u N x u
uu
u x N x N x N x N xuu
x x xN x N x xL L L
xN xL
= ⋅ + ⋅ + ⋅ + ⋅ ⇔
⇔ = ⋅ = ⋅
= − + = −
=
N
N U
2 2
43 2 , ( ) 1x x xN xL L L
− == −
(47β)
Oι σχέσεις αυτές δίνουν ακριβές αποτέλεσμα μόνο στην περίπτωση όπου το γραμμικό στοιχείο
δέν φέρει συγκεντρωμένα ή κατανεμημένα φορτία κατά μήκος του (βλ. §1.9) για το θέμα αυτό).
1.4 Mητρώο δυσκαμψίας δοκού σε απόλυτο σύστημα συντεταγμένων άνευ αξονικών
και διατμητικών παραμορφώσεων
Στο σχήμα 10 παρουσιάζεται το στοιχείο δοκού στο επίπεδο, περιγραφόμενο σε τοπικό σύσ-
τημα συντεταγμένων x y με τους τέσσερις βαθμούς ελευθερίας (δύο ανά κόμβο), τους
1, 2, 3 και 4 . Ο άξονας του στοιχείου βρίσκεται υπό γωνία θ ως προς τον Χ άξονα του από-
λύτου συστήματος ΧΥ της κατασκευής, της οποίας το στοιχείο θεωρείται ως ένα μέλος της. Ο
μεταθετικός βαθμός ελευθερίας 1 του τοπικού συστήματος, αναλύεται στις μεταθετικού τύ-
21
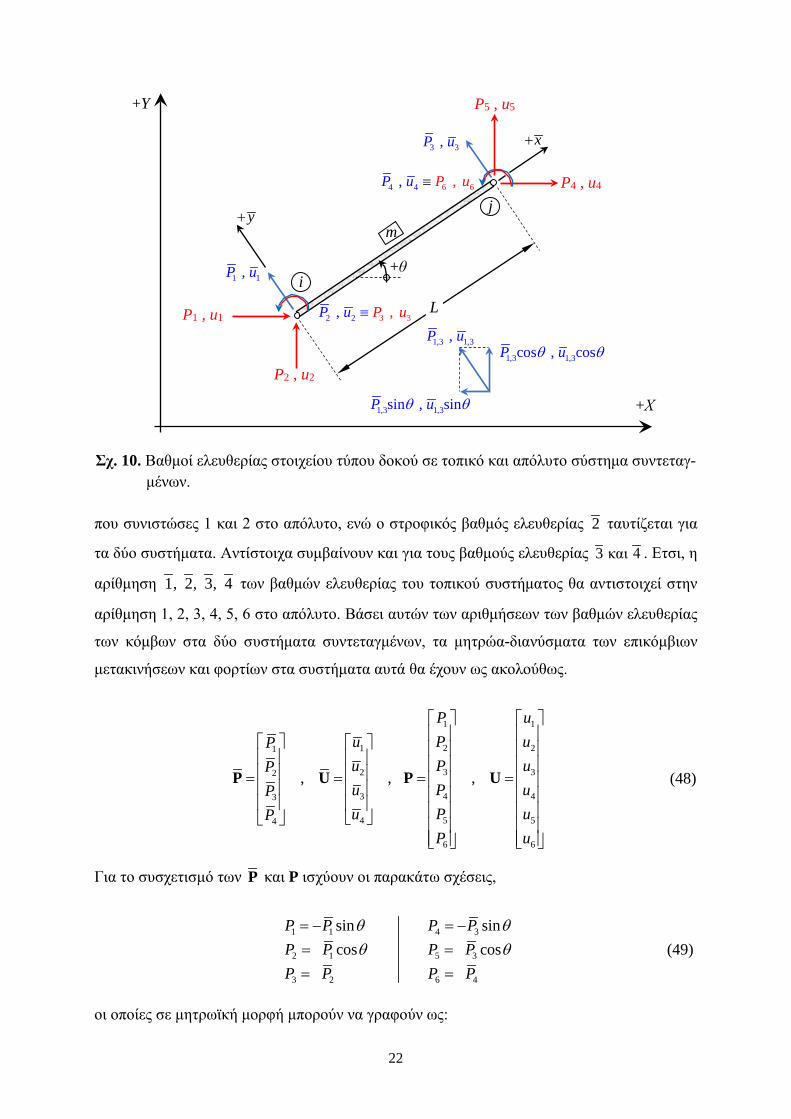
Σχ. 10. Βαθμοί ελευθερίας στοιχείου τύπου δοκού σε τοπικό και απόλυτο σύστημα συντεταγ- μένων. που συνιστώσες 1 και 2 στο απόλυτο, ενώ ο στροφικός βαθμός ελευθερίας 2 ταυτίζεται για
τα δύο συστήματα. Αντίστοιχα συμβαίνουν και για τους βαθμούς ελευθερίας 3 και 4 . Ετσι, η
αρίθμηση 1, 2, 3, 4 των βαθμών ελευθερίας του τοπικού συστήματος θα αντιστοιχεί στην
αρίθμηση 1, 2, 3, 4, 5, 6 στο απόλυτο. Βάσει αυτών των αριθμήσεων των βαθμών ελευθερίας
των κόμβων στα δύο συστήματα συντεταγμένων, τα μητρώα-διανύσματα των επικόμβιων
μετακινήσεων και φορτίων στα συστήματα αυτά θα έχουν ως ακολούθως.
1 1
2 211
3 322
4 433
5 544
6 6
, , ,
P uP uuPP uuPP uuPP uuPP u
= = = =
P U P U (48)
Για το συσχετισμό των P και P ισχύουν οι παρακάτω σχέσεις,
1 1 4 3
2 1 5 3
3 2 6 4
sin sin cos cos
P P P PP P P PP P P P
θ θθ θ
= − = −= == =
(49)
οι οποίες σε μητρωϊκή μορφή μπορούν να γραφούν ως:
1 1 , P u i
j m
L
+Χ
x+
y+
+θ
2 2 3 3 , , P Pu u≡
3 3 , P u
4 4 6 6 , , P Pu u≡
P1 , u1 1,3 1,3 , P u
1,3 1,3cos , cosP uθ θ
1,3 1,3sin , sinP uθ θ
P2 , u2
P4 , u4
P5 , u5 +Y
22
0 0 00 0 0
0 1 0 0 sin όπου και
0 0 0 cos0 0 00 0 1 0
sc
ss cc
θθ
− =
= ⋅ = − =
P T P T (50)
Αντίστοιχα, για το συσχετισμό των U και U θα ισχύουν οι σχέσεις,
1 1 2
2 3
3 4 5
4 6
sin cos
sin cos
u u uu uu u uu u
θ θ
θ θ
= − +=
= − +
=
(51)
οι οποίες σε μητρωϊκή μορφή μπορούν να γραφούν ως:
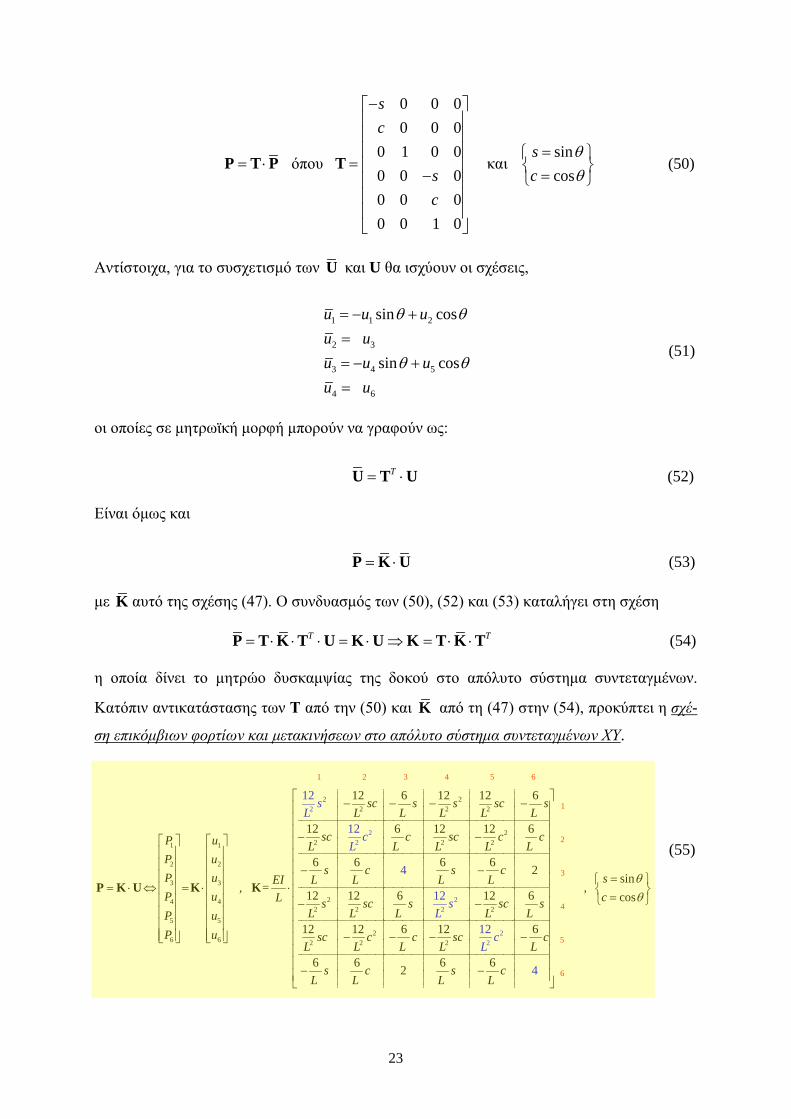
T= ⋅U T U (52) Είναι όμως και
= ⋅P K U (53) με K αυτό της σχέσης (47). Ο συνδυασμός των (50), (52) και (53) καταλήγει στη σχέση T T= ⋅ ⋅ ⋅ = ⋅ ⇒ = ⋅ ⋅P T K T U K U K T K T (54) η οποία δίνει το μητρώο δυσκαμψίας της δοκού στο απόλυτο σύστημα συντεταγμένων.
Κατόπιν αντικατάστασης των Τ από την (50) και K από τη (47) στην (54), προκύπτει η σχέ-
ση επικόμβιων φορτίων και μετακινήσεων στο απόλυτο σύστημα συντεταγμένων ΧΥ.
1 2 3 4 5
22 2 2
22 2 21 1
2 2
3 3
24 42 2
5 5
6
22
22
2
6
2
6
12 6 12 12 6
12 6 1
12
12
4
12
2 12 6
6 6 6 6 2 , = 12 12 6 12
sc s s sc sL L L L L
sc c sc c cP u L L L L LP u
s c s cP u EI L L L LP
sL
cL
u L s sc sL L LP u
P u
sL
− − − −
− − − −
= ⋅ ⇔ = ⋅ ⋅ − −
P K U K K2
22
22
2 2
1
2
3
4
5
6
sin , 6 cos
12 12 6 12 6
1
1
1
1
6 6 6 6
2
1
1
1
2 4
scsc s
L L
sc c c sc cL L L L L
s c s
L
L
cL L L L
L
LL
L
L
c
θθ
= =
− − − − − −
(55)
23
Για θ = 0, οπότε s = 0 και c = 1, τα δύο συστήματα συντεταγμένων, απόλυτο και τοπικό, ταυ-
τίζονται. Στην περίπτωση αυτή οι 1 και 4 γραμμές και στήλες της (55) μηδενίζονται
2
2
2
2
1 2 3 4 5 6
0 0 0 0 0 0
0 0
0 0
0 0 0 0 0 0
0 0
0
6 12 6
6 6 2=
12 6 6
6 0
12
4
1
62
2
4
L L L
EI L LL
L L L
L
L
L
L
− − ⋅
− − − −
K
1
2
3
4
5
6
1
1
1
1
1
1
L
L
L
L
L
L
(56)
οπότε το εναπομένων μητρώο ταυτίζεται με αυτό της σχέσης (47). Για τα είδη προβλημάτων
στα οποία μπορεί να χρησιμοποιείται ισχύουν τα αναφερόμενα για το αντίστοιχό του στο
τοπικό σύστημα συντεταγμένων, της σχέσης (47).
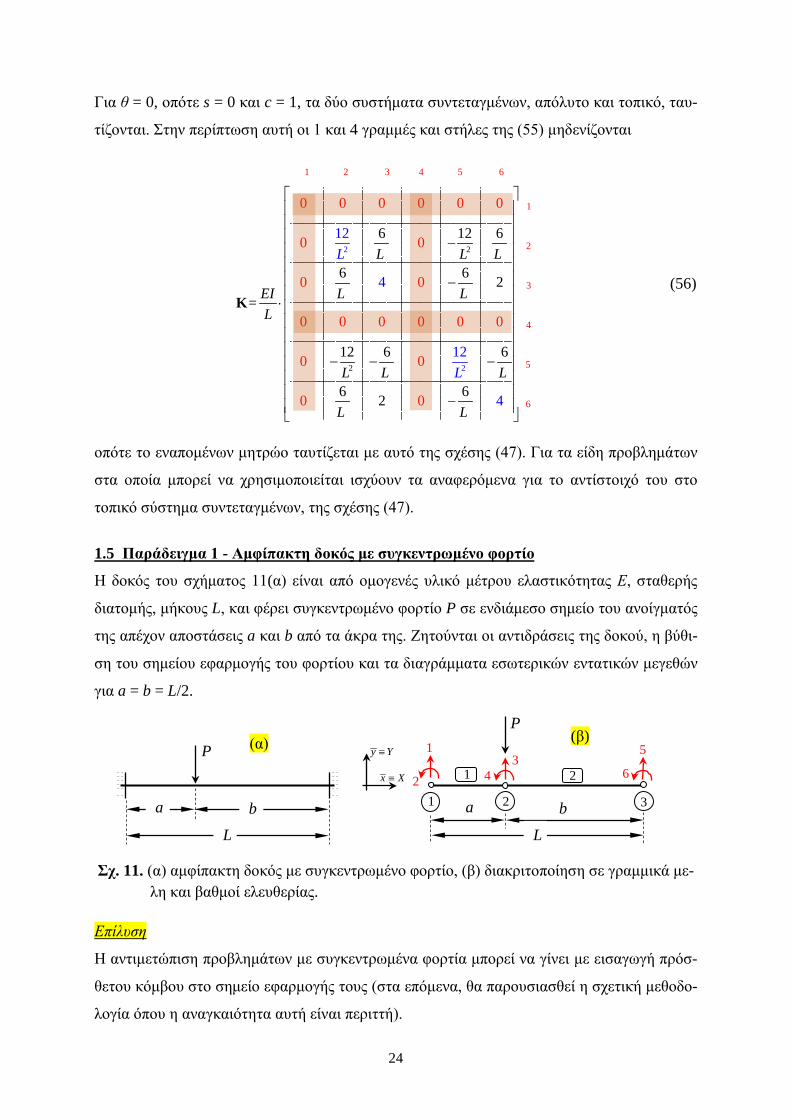
1.5 Παράδειγμα 1 - Αμφίπακτη δοκός με συγκεντρωμένο φορτίο
Η δοκός του σχήματος 11(α) είναι από ομογενές υλικό μέτρου ελαστικότητας Ε, σταθερής
διατομής, μήκους L, και φέρει συγκεντρωμένο φορτίο P σε ενδιάμεσο σημείο του ανοίγματός
της απέχον αποστάσεις a και b από τα άκρα της. Ζητούνται οι αντιδράσεις της δοκού, η βύθι-
ση του σημείου εφαρμογής του φορτίου και τα διαγράμματα εσωτερικών εντατικών μεγεθών
για a = b = L/2.
Σχ. 11. (α) αμφίπακτη δοκός με συγκεντρωμένο φορτίο, (β) διακριτοποίηση σε γραμμικά με- λη και βαθμοί ελευθερίας. Επίλυση
Η αντιμετώπιση προβλημάτων με συγκεντρωμένα φορτία μπορεί να γίνει με εισαγωγή πρόσ-
θετου κόμβου στο σημείο εφαρμογής τους (στα επόμενα, θα παρουσιασθεί η σχετική μεθοδο-
λογία όπου η αναγκαιότητα αυτή είναι περιττή).
1 P
L
a
b
P
L
a
b
2 3
4
5
6
1 2 3
1 2
(α) (β)
x X≡
y Y≡
24
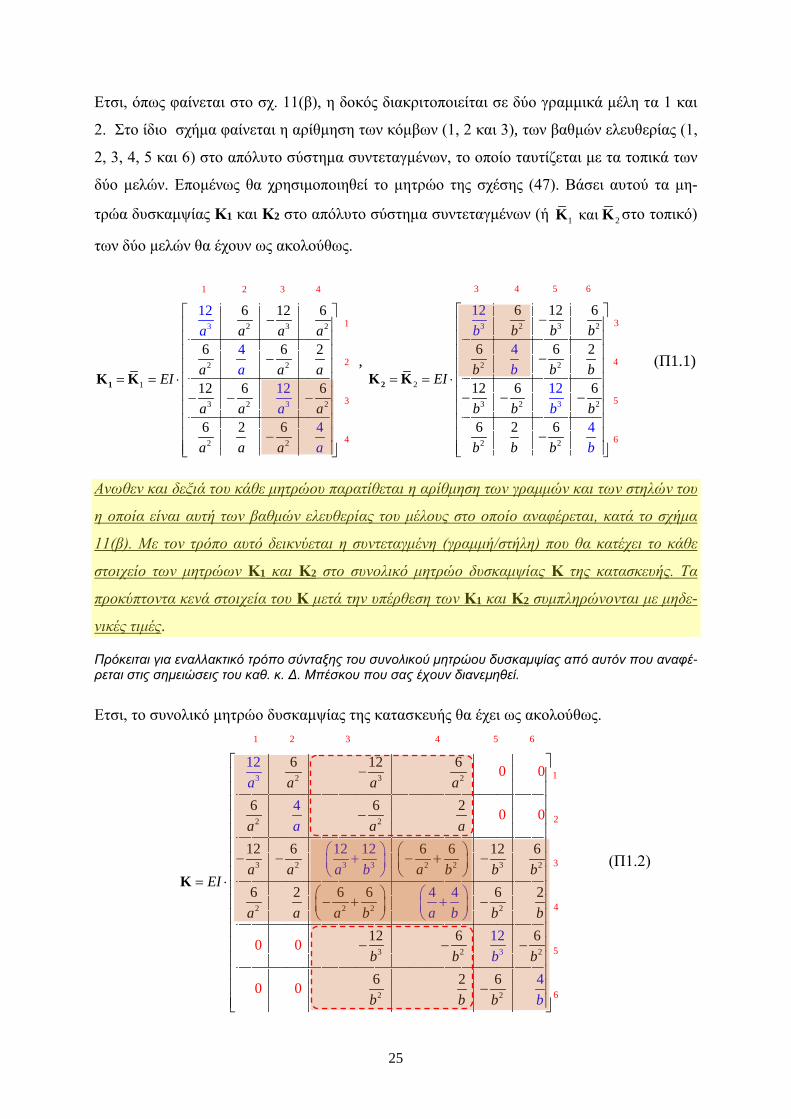
Ετσι, όπως φαίνεται στο σχ. 11(β), η δοκός διακριτοποιείται σε δύο γραμμικά μέλη τα 1 και
2. Στο ίδιο σχήμα φαίνεται η αρίθμηση των κόμβων (1, 2 και 3), των βαθμών ελευθερίας (1,
2, 3, 4, 5 και 6) στο απόλυτο σύστημα συντεταγμένων, το οποίο ταυτίζεται με τα τοπικά των
δύο μελών. Επομένως θα χρησιμοποιηθεί το μητρώο της σχέσης (47). Βάσει αυτού τα μη-
τρώα δυσκαμψίας Κ1 και Κ2 στο απόλυτο σύστημα συντεταγμένων (ή 1 2 και K K στο τοπικό)
των δύο μελών θα έχουν ως ακολούθως.
2 3 2
2 2
1
3 2 2
2
3
2
3
1 2
3 4
1
2
4
3
11
6 12 6
6 6 2
12 6
12
4
12
4
6
6 2 6
a a a
a a aEI
a a a
a a a
a
a
a
a
− −
= = ⋅ − − − −
1K K,
2 3 23
3
2 2
2
3 2 2
2 2
3 4 5 6
3
4
5
6
612
4
12
4
112 6
6 6 2
12 6 6
6 2 6
1b b b
b b bEI
b b b
b b b
b
b
b
b
− −
= = ⋅ − − − −
2K K (Π1.1)
Ανωθεν και δεξιά του κάθε μητρώου παρατίθεται η αρίθμηση των γραμμών και των στηλών του
η οποία είναι αυτή των βαθμών ελευθερίας του μέλους στο οποίο αναφέρεται, κατά το σχήμα
11(β). Με τον τρόπο αυτό δεικνύεται η συντεταγμένη (γραμμή/στήλη) που θα κατέχει το κάθε
στοιχείο των μητρώων Κ1 και Κ2 στο συνολικό μητρώο δυσκαμψίας Κ της κατασκευής. Τα
προκύπτοντα κενά στοιχεία του Κ μετά την υπέρθεση των Κ1 και Κ2 συμπληρώνονται με μηδε-
νικές τιμές.
Πρόκειται για εναλλακτικό τρόπο σύνταξης του συνολικού μητρώου δυσκαμψίας από αυτόν που αναφέ-ρεται στις σημειώσεις του καθ. κ. Δ. Μπέσκου που σας έχουν διανεμηθεί.
Ετσι, το συνολικό μητρώο δυσκαμψίας της κατασκευής θα έχει ως ακολούθως.
3 2 3 2
2 2
33 2 3
1 2 3 4 5 6
12
4
12 12
6 12 6
6 6 2
12
0
6
0
0 0
a aa
a
a
a
a a a
a aEI
b
−
−
− − − +
=
⋅K
3
2 2 3 2
2 2 2 2
3 2 2
2 2
1
2
3
4
6
5
6 6 12 6
6 2 6 6 6 2
12 6 6
6 2
4 4
120
0 0 6 4
0
11
a b b b
a a a b b b
b b b
b b b
a b
b
b
+ −
− + −
− − − −
+
(Π1.2)
25
Οι βαθμοί ελευθερίας 3 και 4 είναι κοινοί για τον κόμβο 2, ο οποίος είναι το πέρας του μέ-
λους 1 και η αρχή του μέλους 2. Επομένως η υπέρθεση των δύο μητρώων, για τη σύνταξη του
συνολικού μητρώου δυσκαμψίας της κατασκευής ως σύνολο, θα αφορά την πρόσθεση των
στοιχείων της 3ης και 4ης γραμμής και στήλης του Κ1 με αυτά της 1ης και 2ης γραμμής και
στήλης του Κ2 (βλ. σκιασμένες περιοχές στις σχέσεις (Π1.1) και (Π1.2)).
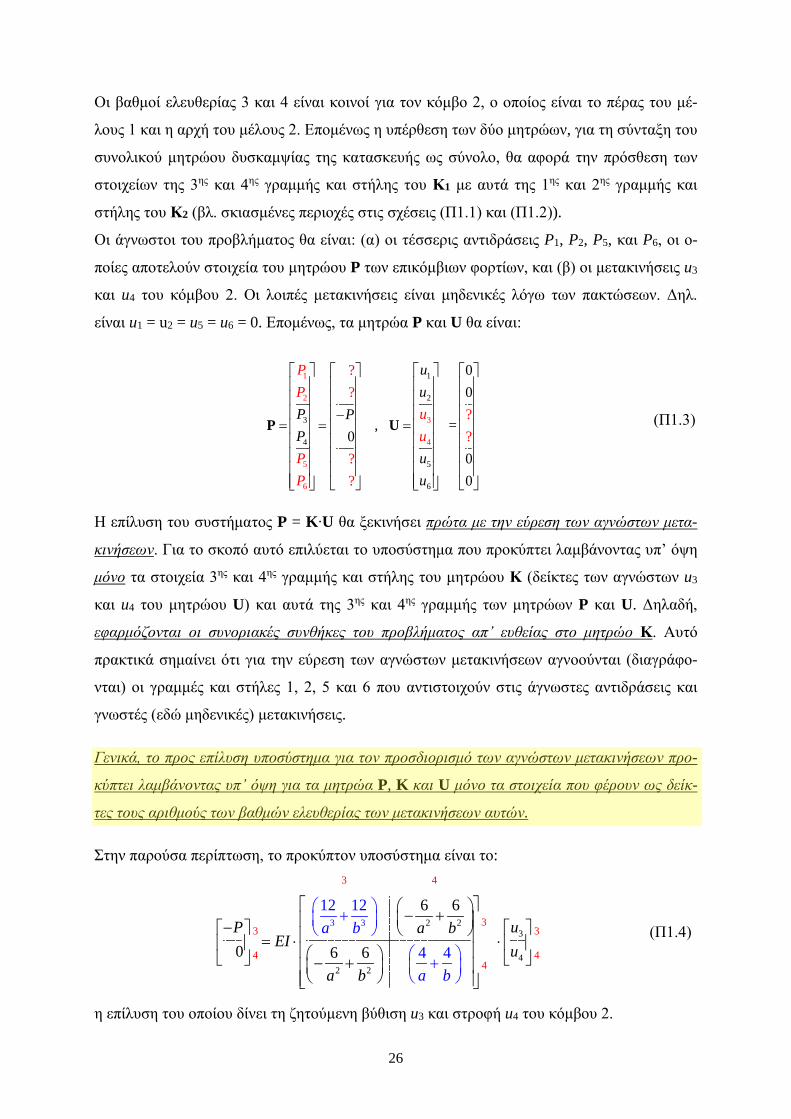
Οι άγνωστοι του προβλήματος θα είναι: (α) οι τέσσερις αντιδράσεις P1, P2, P5, και P6, οι ο-
ποίες αποτελούν στοιχεία του μητρώου P των επικόμβιων φορτίων, και (β) οι μετακινήσεις u3
και u4 του κόμβου 2. Οι λοιπές μετακινήσεις είναι μηδενικές λόγω των πακτώσεων. Δηλ.
είναι u1 = u2 = u5 = u6 = 0. Επομένως, τα μητρώα P και U θα είναι:
1
2
3
1
2
3
4 4
5
6
5
6
00
,
??
??
=0
00
??
PP
u
uu
P PP
uu
PuP
−
= = =
P U (Π1.3)
Η επίλυση του συστήματος P = K∙U θα ξεκινήσει πρώτα με την εύρεση των αγνώστων μετα-
κινήσεων. Για το σκοπό αυτό επιλύεται το υποσύστημα που προκύπτει λαμβάνοντας υπ’ όψη
μόνο τα στοιχεία 3ης και 4ης γραμμής και στήλης του μητρώου Κ (δείκτες των αγνώστων u3
και u4 του μητρώου U) και αυτά της 3ης και 4ης γραμμής των μητρώων P και U. Δηλαδή,
εφαρμόζονται οι συνοριακές συνθήκες του προβλήματος απ’ ευθείας στο μητρώο Κ. Αυτό
πρακτικά σημαίνει ότι για την εύρεση των αγνώστων μετακινήσεων αγνοούνται (διαγράφο-
νται) οι γραμμές και στήλες 1, 2, 5 και 6 που αντιστοιχούν στις άγνωστες αντιδράσεις και
γνωστές (εδώ μηδενικές) μετακινήσεις. Γενικά, το προς επίλυση υποσύστημα για τον προσδιορισμό των αγνώστων μετακινήσεων προ-
κύπτει λαμβάνοντας υπ’ όψη για τα μητρώα P, K και U μόνο τα στοιχεία που φέρουν ως δείκ-
τες τους αριθμούς των βαθμών ελευθερίας των μετακινήσεων αυτών. Στην παρούσα περίπτωση, το προκύπτον υποσύστημα είναι το:
2 2
3
42 2
3 3
3 4
33
3
44
4
6 612 12
40 6 6 4
11P ua ba b
EI ua b a b
+
+
− + − = ⋅ ⋅ − +
(Π1.4)
η επίλυση του οποίου δίνει τη ζητούμενη βύθιση u3 και στροφή u4 του κόμβου 2.
26
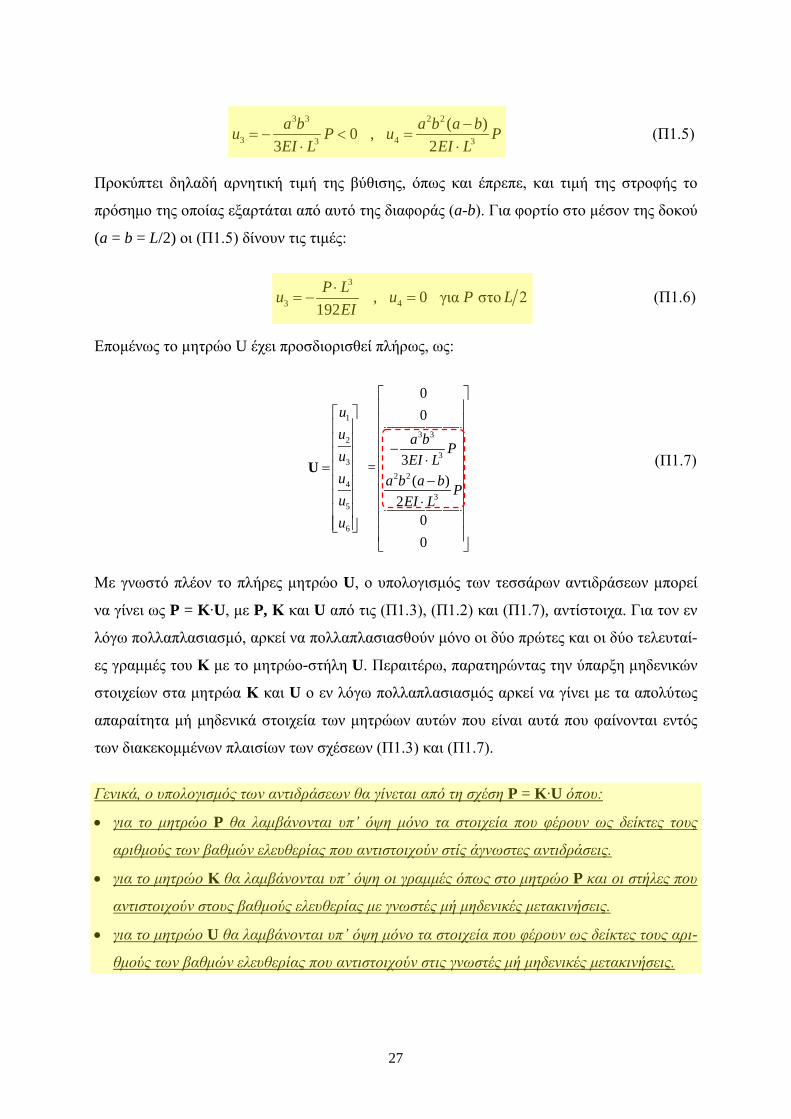
3 3 2 2
3 43 3
( )0 , 3 2
a b a b a bu P u PEI L EI L
−= − < =
⋅ ⋅ (Π1.5)
Προκύπτει δηλαδή αρνητική τιμή της βύθισης, όπως και έπρεπε, και τιμή της στροφής το
πρόσημο της οποίας εξαρτάται από αυτό της διαφοράς (a-b). Για φορτίο στο μέσον της δοκού
(a = b = L/2) οι (Π1.5) δίνουν τις τιμές:
3
3 4 , 0 για στο 2192P Lu u P L
EI⋅
= − = (Π1.6)
Επομένως το μητρώο U έχει προσδιορισθεί πλήρως, ως:
1
3 32
33
2 24
35
6
00
3 =( )
200
uu a b Pu EI Lu a b a b Pu EI Lu
− ⋅ = − ⋅
U (Π1.7)
Με γνωστό πλέον το πλήρες μητρώο U, ο υπολογισμός των τεσσάρων αντιδράσεων μπορεί
να γίνει ως P = K∙U, με P, Κ και U από τις (Π1.3), (Π1.2) και (Π1.7), αντίστοιχα. Για τον εν
λόγω πολλαπλασιασμό, αρκεί να πολλαπλασιασθούν μόνο οι δύο πρώτες και οι δύο τελευταί-
ες γραμμές του Κ με το μητρώο-στήλη U. Περαιτέρω, παρατηρώντας την ύπαρξη μηδενικών
στοιχείων στα μητρώα Κ και U ο εν λόγω πολλαπλασιασμός αρκεί να γίνει με τα απολύτως
απαραίτητα μή μηδενικά στοιχεία των μητρώων αυτών που είναι αυτά που φαίνονται εντός
των διακεκομμένων πλαισίων των σχέσεων (Π1.3) και (Π1.7).
Γενικά, ο υπολογισμός των αντιδράσεων θα γίνεται από τη σχέση P = K∙U όπου:
• για το μητρώο P θα λαμβάνονται υπ’ όψη μόνο τα στοιχεία που φέρουν ως δείκτες τους
αριθμούς των βαθμών ελευθερίας που αντιστοιχούν στίς άγνωστες αντιδράσεις.
• για το μητρώο Κ θα λαμβάνονται υπ’ όψη οι γραμμές όπως στο μητρώο P και οι στήλες που
αντιστοιχούν στους βαθμούς ελευθερίας με γνωστές μή μηδενικές μετακινήσεις.
• για το μητρώο U θα λαμβάνονται υπ’ όψη μόνο τα στοιχεία που φέρουν ως δείκτες τους αρι-
θμούς των βαθμών ελευθερίας που αντιστοιχούν στις γνωστές μή μηδενικές μετακινήσεις.
27
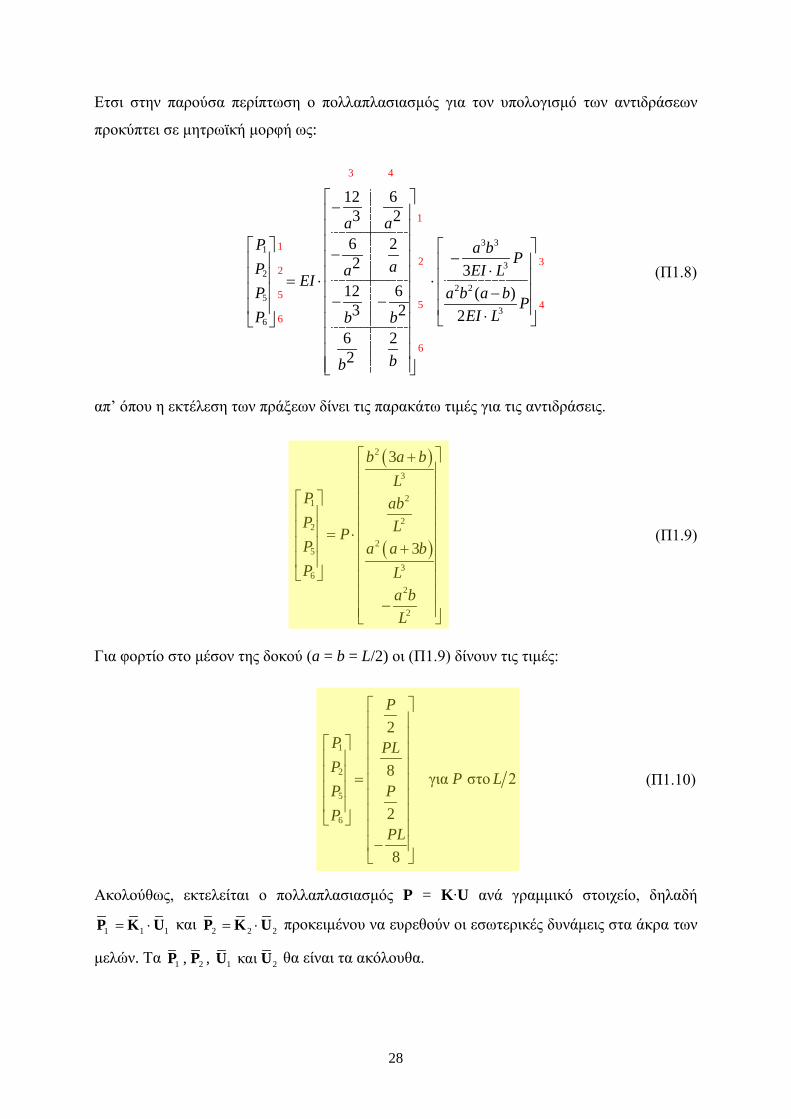
Ετσι στην παρούσα περίπτωση ο πολλαπλασιασμός για τον υπολογισμό των αντιδράσεων
προκύπτει σε μητρωϊκή μορφή ως:
3 31
32
2 25
36
3 4
1
12 3
2
55 4
6
6
1
12 6
3 2
6 22 3 12 6 ( )3
62
1
2 22
11a a
P a b PaP a EI LEIP a b a b P
EI LP b b
bb
− − − ⋅ = ⋅ ⋅ − − − ⋅
(Π1.8)
απ’ όπου η εκτέλεση των πράξεων δίνει τις παρακάτω τιμές για τις αντιδράσεις.
( )
( )
2
3
2
2
2
3
2
1
2
2
5
6
3
3
b a bL
abL
a a bLa bL
PP
PPP
= ⋅
+
+
−
(Π1.9)
Για φορτίο στο μέσον της δοκού (a = b = L/2) οι (Π1.9) δίνουν τις τιμές:
1
2
5
6
για στ
8
ο 2
2
8
2
P
P
PL
PP
LPP
PL
P
= −
(Π1.10)
Ακολούθως, εκτελείται ο πολλαπλασιασμός P = K∙U ανά γραμμικό στοιχείο, δηλαδή
1 1 1= ⋅P K U και 2 2 2= ⋅P K U προκειμένου να ευρεθούν οι εσωτερικές δυνάμεις στα άκρα των
μελών. Τα 1 2 1 2, , και P P U U θα είναι τα ακόλουθα.
28
(1) (1)11 1
(1) (1) 3 322 2
1 1(1) (1) 333 3
(1) (1) 2 244 4
3
(2)1
(2)2
2 2(2)3(2)
4
00
, 3
( )2
,
uP uuP u a b PuP u EI LuP u a b a b P
EI L
P uPPP
= = = = − ⋅ − ⋅
= =
P U
P U
3 3
(2) 331
(2) 2 242
3(2)53
(2)64
3( )
200
a b Pu EI Luu a b a b Pu EI Luuu
− ⋅ − = = ⋅
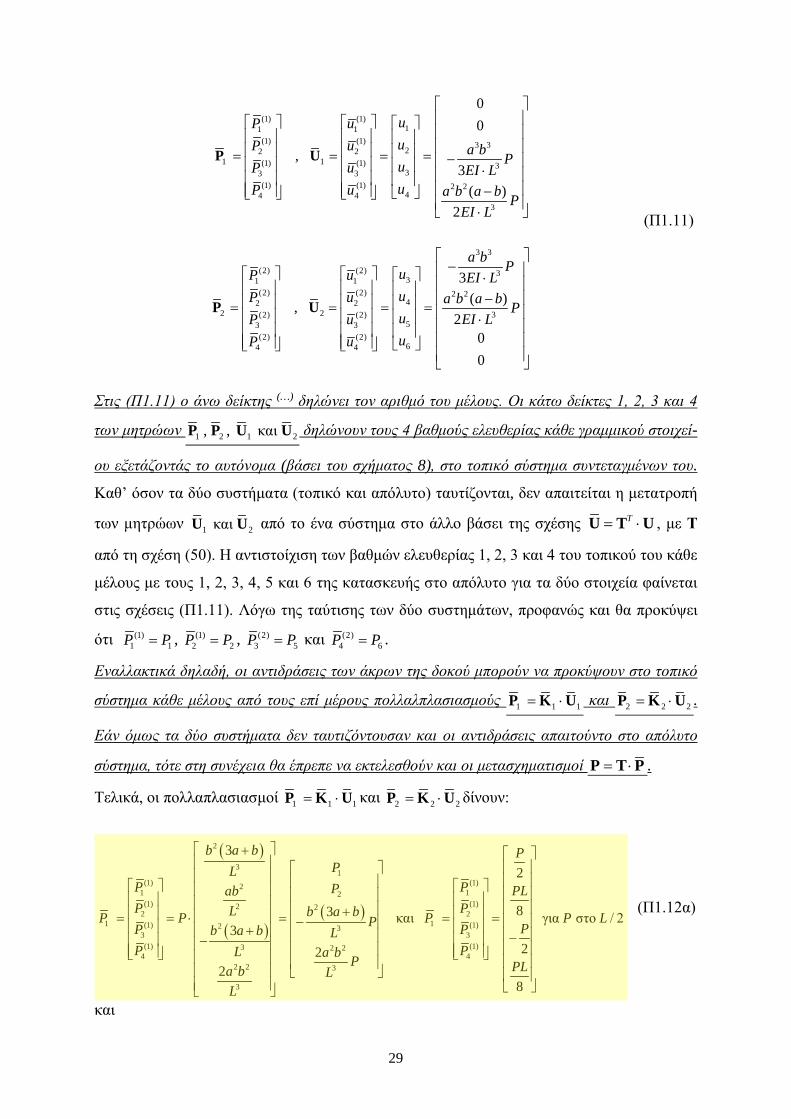
(Π1.11)
Στις (Π1.11) ο άνω δείκτης (…) δηλώνει τον αριθμό του μέλους. Οι κάτω δείκτες 1, 2, 3 και 4
των μητρώων 1 2 1 2, , και P P U U δηλώνουν τους 4 βαθμούς ελευθερίας κάθε γραμμικού στοιχεί-
ου εξετάζοντάς το αυτόνομα (βάσει του σχήματος 8), στο τοπικό σύστημα συντεταγμένων του.
Καθ’ όσον τα δύο συστήματα (τοπικό και απόλυτο) ταυτίζονται, δεν απαιτείται η μετατροπή
των μητρώων 1 2 και U U από το ένα σύστημα στο άλλο βάσει της σχέσης T= ⋅U T U , με Τ
από τη σχέση (50). Η αντιστοίχιση των βαθμών ελευθερίας 1, 2, 3 και 4 του τοπικού του κάθε
μέλους με τους 1, 2, 3, 4, 5 και 6 της κατασκευής στο απόλυτο για τα δύο στοιχεία φαίνεται
στις σχέσεις (Π1.11). Λόγω της ταύτισης των δύο συστημάτων, προφανώς και θα προκύψει
ότι (1)1 1P P= , (1)
2 2P P= , (2)3 5P P= και (2)
4 6P P= .
Εναλλακτικά δηλαδή, οι αντιδράσεις των άκρων της δοκού μπορούν να προκύψουν στο τοπικό
σύστημα κάθε μέλους από τους επί μέρους πολλαλπλασιασμούς 1 1 1= ⋅P K U και 2 2 2= ⋅P K U .
Εάν όμως τα δύο συστήματα δεν ταυτιζόντουσαν και οι αντιδράσεις απαιτούντο στο απόλυτο
σύστημα, τότε στη συνέχεια θα έπρεπε να εκτελεσθούν και οι μετασχηματισμοί = ⋅P T P .
Τελικά, οι πολλαπλασιασμοί 1 1 1= ⋅P K U και 2 2 2= ⋅P K U δίνουν:
( )
( )( )
1(1) (
2
1)1 12
(1) (1)2 2
1
3
2
2 2
2 3
3 2 2
2 2 3
1
3
(1) (1)3 3(1) (1)
4 4
32
833
222
8
και
b a b PL
PLabL b
PP PP
a bP Pb a b L
L
P PP P P
Pa b P PLa b L
P
L
PP
+
+−
+
= = ⋅ = = = −−
για στο / 2P L
(Π1.12α)
και
29
( )
( )
( )(2) (2)
1 1(2) (2)
2 22 2
2
2
(2) (2)3 3(2) (2)
54
3
32 2
2 23
32
3
26
4
2
3
και
3 22
3
8
2 8
2
a a b Pa a bL P
L PLa ba bL
PLa a bL
PLPa b
P PP P
P P PPP P
PP
L
P
= = ⋅ = = =
+− −+
−
−−−
+
−−
για στο / 2P L
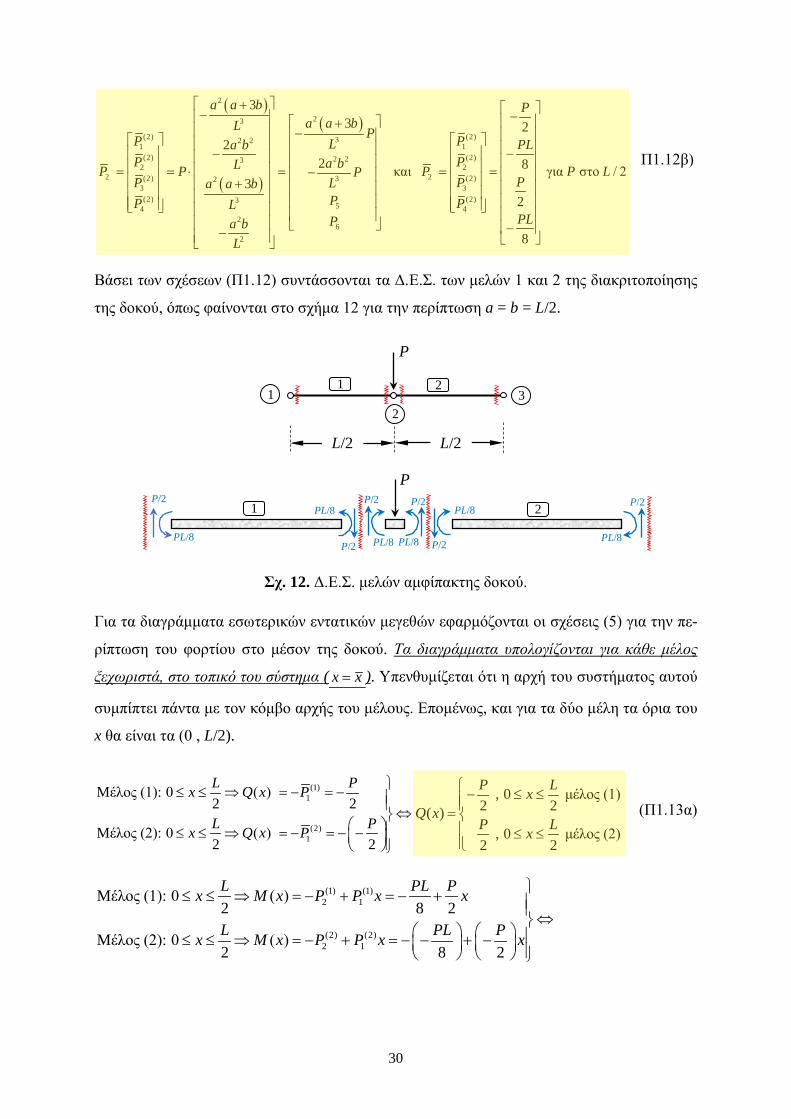
Π1.12β)
Βάσει των σχέσεων (Π1.12) συντάσσονται τα Δ.Ε.Σ. των μελών 1 και 2 της διακριτοποίησης
της δοκού, όπως φαίνονται στο σχήμα 12 για την περίπτωση a = b = L/2.
Σχ. 12. Δ.Ε.Σ. μελών αμφίπακτης δοκού. Για τα διαγράμματα εσωτερικών εντατικών μεγεθών εφαρμόζονται οι σχέσεις (5) για την πε-
ρίπτωση του φορτίου στο μέσον της δοκού. Τα διαγράμματα υπολογίζονται για κάθε μέλος
ξεχωριστά, στο τοπικό του σύστημα ( x x= ). Υπενθυμίζεται ότι η αρχή του συστήματος αυτού
συμπίπτει πάντα με τον κόμβο αρχής του μέλους. Επομένως, και για τα δύο μέλη τα όρια του
x θα είναι τα (0 , L/2).
(1)
1
(2)1
Mέλος (1): 0 ( ) , 0 μέλος (1)2 2 2 2( )Mέλος (2): 0 ( ) , 0 μέλος (2)
2 2 2 2
L P P Lx Q x P xQ x
L P P Lx Q x P x
≤ ≤ ⇒ = − = − − ≤ ≤ ⇔ = ≤ ≤ ⇒ = − = − − ≤ ≤
(Π1.13α)
(1) (1)
2 1
(2) (2)2 1
Mέλος (1): 0 ( )2 8 2
Mέλος (2): 0 ( )2 8 2
L PL Px M x P P x x
L PL Px M x P P x x
≤ ≤ ⇒ = − + = − + ⇔ ≤ ≤ ⇒ = − + = − − + −
P
L/2
1 2
3 1 2
L/2
P
P/2
P/2
P/2 P/2
P/2
P/2
PL/8
PL/8
PL/8 PL/8
PL/8
PL/8
1 2
30
( )
( )
4 , 0 μέλος (1)8 2( )
4 , 0 μέλος (2)8 2
P LL x xM x
P LL x x
− − ≤ ≤⇔ = − ≤ ≤
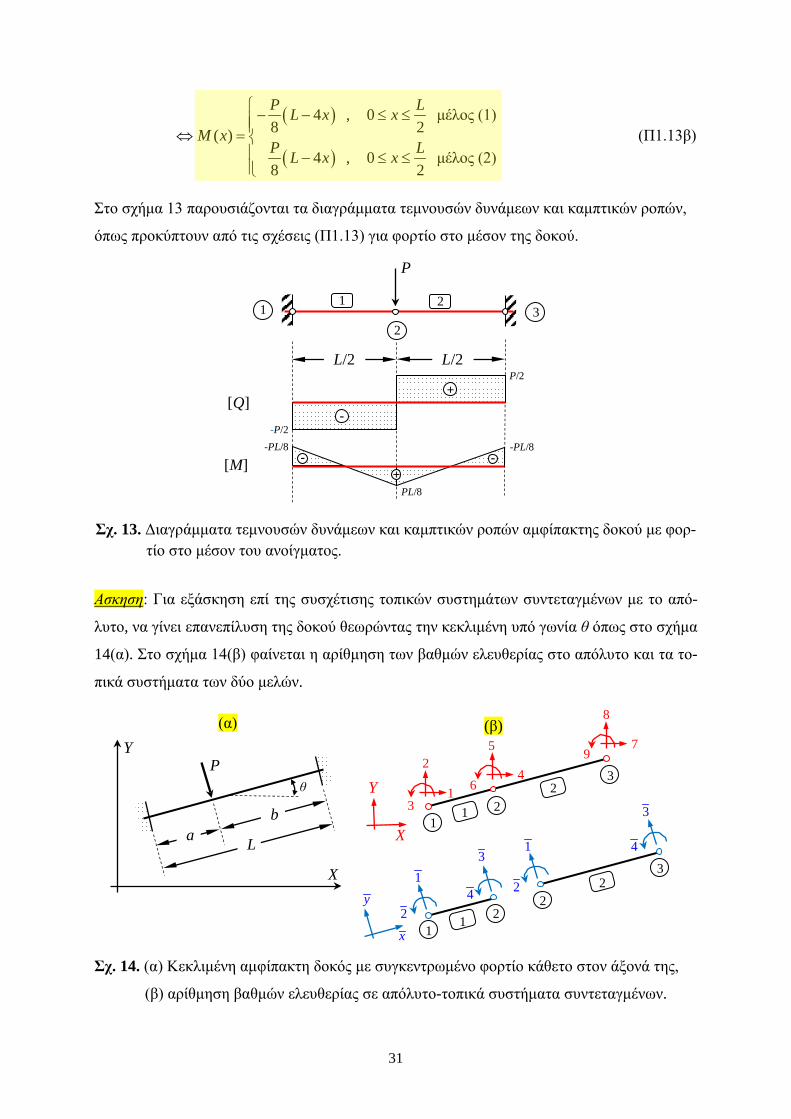
(Π1.13β)
Στο σχήμα 13 παρουσιάζονται τα διαγράμματα τεμνουσών δυνάμεων και καμπτικών ροπών,
όπως προκύπτουν από τις σχέσεις (Π1.13) για φορτίο στο μέσον της δοκού.
Σχ. 13. Διαγράμματα τεμνουσών δυνάμεων και καμπτικών ροπών αμφίπακτης δοκού με φορ- τίο στο μέσον του ανοίγματος.
Ασκηση: Για εξάσκηση επί της συσχέτισης τοπικών συστημάτων συντεταγμένων με το από-
λυτο, να γίνει επανεπίλυση της δοκού θεωρώντας την κεκλιμένη υπό γωνία θ όπως στο σχήμα
14(α). Στο σχήμα 14(β) φαίνεται η αρίθμηση των βαθμών ελευθερίας στο απόλυτο και τα το-
πικά συστήματα των δύο μελών.
Σχ. 14. (α) Κεκλιμένη αμφίπακτη δοκός με συγκεντρωμένο φορτίο κάθετο στον άξονά της,
(β) αρίθμηση βαθμών ελευθερίας σε απόλυτο-τοπικά συστήματα συντεταγμένων.
L/2
1 2
3 1 2
L/2
P
-P/2 -PL/8
+
-
P/2
-PL/8
PL/8
- - +
[Q]
[M]
X
P
L a
b
Y
θ 1
2
3
4
5
6
7
8
9
1
2
1 2
3
1 2
2
3
1
2 1
2
3
4
1
2
3
4
y
x
X
Y
(α) (β)
31
Η επίλυση να γίνει στο απόλυτο σύστημα συντεταγμένων ΧΥ ενώ τα αποτελέσματα εντατι-
κών μεγεθών και μετακινήσεων να εκφρασθούν στα τοπικά συστήματα x y των δύο μελών.
Θα πρέπει να προκύψουν ταυτόσημα με αυτά της παραπάνω επίλυσης.
1.6 Παράδειγμα 2 - Δοκός δύο ανοιγμάτων με μία στήριξη ελατηρίου
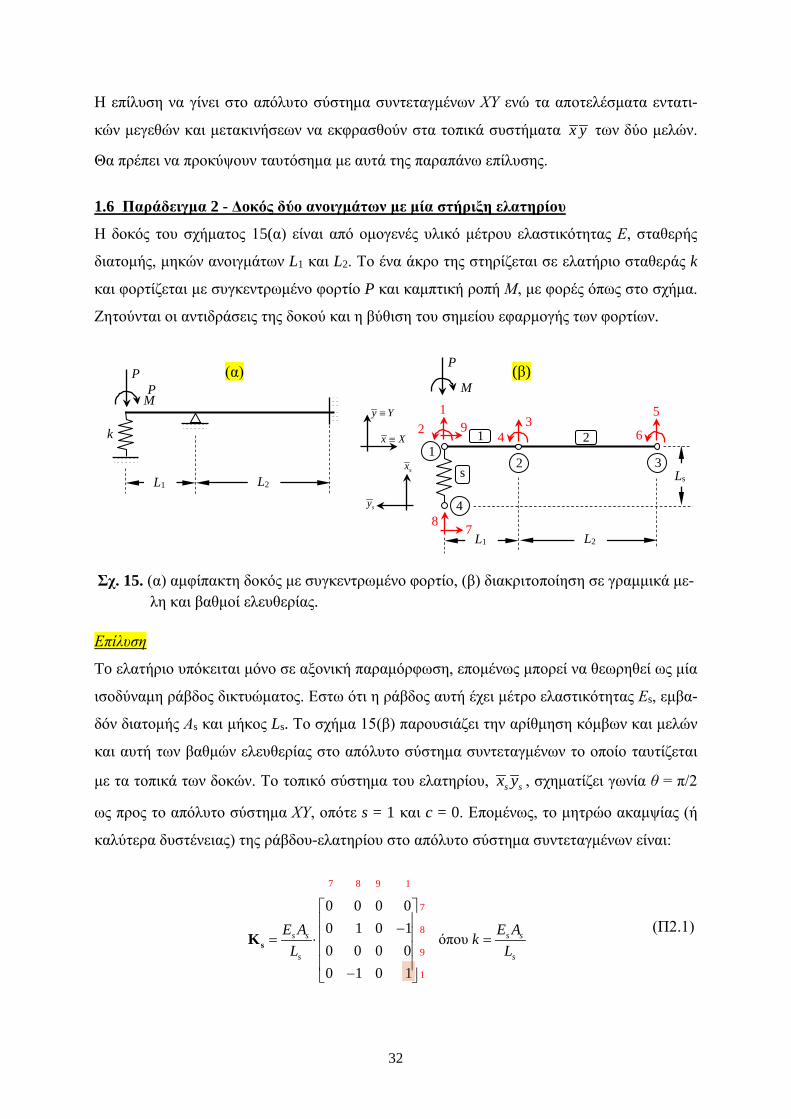
Η δοκός του σχήματος 15(α) είναι από ομογενές υλικό μέτρου ελαστικότητας Ε, σταθερής
διατομής, μηκών ανοιγμάτων L1 και L2. Το ένα άκρο της στηρίζεται σε ελατήριο σταθεράς k
και φορτίζεται με συγκεντρωμένο φορτίο P και καμπτική ροπή Μ, με φορές όπως στο σχήμα.
Ζητούνται οι αντιδράσεις της δοκού και η βύθιση του σημείου εφαρμογής των φορτίων.
Σχ. 15. (α) αμφίπακτη δοκός με συγκεντρωμένο φορτίο, (β) διακριτοποίηση σε γραμμικά με- λη και βαθμοί ελευθερίας. Επίλυση
To ελατήριο υπόκειται μόνο σε αξονική παραμόρφωση, επομένως μπορεί να θεωρηθεί ως μία
ισοδύναμη ράβδος δικτυώματος. Εστω ότι η ράβδος αυτή έχει μέτρο ελαστικότητας Εs, εμβα-
δόν διατομής Αs και μήκος Ls. Το σχήμα 15(β) παρουσιάζει την αρίθμηση κόμβων και μελών
και αυτή των βαθμών ελευθερίας στο απόλυτο σύστημα συντεταγμένων το οποίο ταυτίζεται
με τα τοπικά των δοκών. Το τοπικό σύστημα του ελατηρίου, s sx y , σχηματίζει γωνία θ = π/2
ως προς το απόλυτο σύστημα ΧΥ, οπότε s = 1 και c = 0. Επομένως, το μητρώο ακαμψίας (ή
καλύτερα δυστένειας) της ράβδου-ελατηρίου στο απόλυτο σύστημα συντεταγμένων είναι:
7 8 9 1
7
8
9
1
0 0 0 00 1 0 1
όπου 0 0 0 00 1 0 1
s s s s
s s
E A E AkL L
− = ⋅ = −
sK (Π2.1)
Ls
1
P
L1
P
2 3 4
5
6 1
2 3
1 2
(α) (β)
x X≡
y Y≡
L2
M
k
L1 L2
M
8
P
s
4
7
9
sx
sy
32
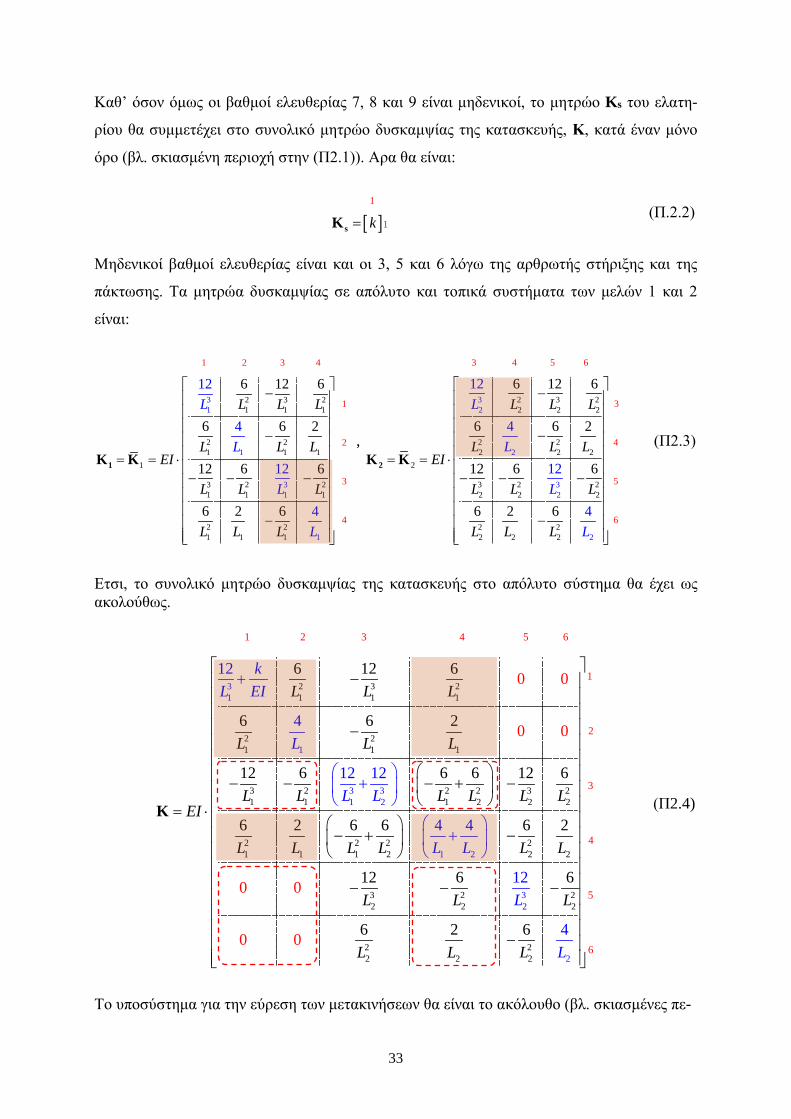
Καθ’ όσον όμως οι βαθμοί ελευθερίας 7, 8 και 9 είναι μηδενικοί, το μητρώο Ks του ελατη-
ρίου θα συμμετέχει στο συνολικό μητρώο δυσκαμψίας της κατασκευής, Κ, κατά έναν μόνο
όρο (βλ. σκιασμένη περιοχή στην (Π2.1)). Αρα θα είναι:
[ ] 1
1k=sK (Π.2.2)
Μηδενικοί βαθμοί ελευθερίας είναι και οι 3, 5 και 6 λόγω της αρθρωτής στήριξης και της
πάκτωσης. Τα μητρώα δυσκαμψίας σε απόλυτο και τοπικά συστήματα των μελών 1 και 2
είναι:
2 3 21 1 1
2 21 1 1
1
3 2 21 1 1
2 21 1 1
31
1
31
1
1 2 3 4
12 6 12 6
6 6 2
12 6 6
6 2 6
4
2
4
1
L L L
L L LEI
L L L
L L
L
L
L
L
L
− − = = ⋅ − − −
−
1K K
1
2
4
3
11
,
32
2
32
2
2 3 22 2 2
2 22 2 2
2
3 2 22 2 2
2 22 2 2
3 4 5 6
3
6 12 612
6 6 2
12 6 6
6
4
12
42 6
L L L L
L L LEI
L L L
L
L
L
LL L
− − = = ⋅ − − −
−
2K K
6
4
5
11
(Π2.3)
Ετσι, το συνολικό μητρώο δυσκαμψίας της κατασκευής στο απόλυτο σύστημα θα έχει ως ακολούθως.
2 3 21 1
31
2
1
12
1 1 1
1 2 3 4 5 6
0 0
0
6 12 612
6 6 24
2
0
1
kL E L L L
L L L
LE
I
I
L
+ −
−
−
= ⋅K3 2 2 2 3 21 1 1 2 2 2
2 2 2 21 1 1 2 2 2
3 2 22 2 2
2 22
3 31
2
2
1 2
2
2
3
2
1
2
3
4
6
5
6 6 6 12 6
6 2 6 6 6 2
12
12 12
4 4
12
4
0
0
6
6 2 60
60
11
L L L L L
L L L L L L
L L L
L L
L L
L L
L
L L
+
− − + −
− + −
− − −
+
−
(Π2.4)
Το υποσύστημα για την εύρεση των μετακινήσεων θα είναι το ακόλουθο (βλ. σκιασμένες πε-
33
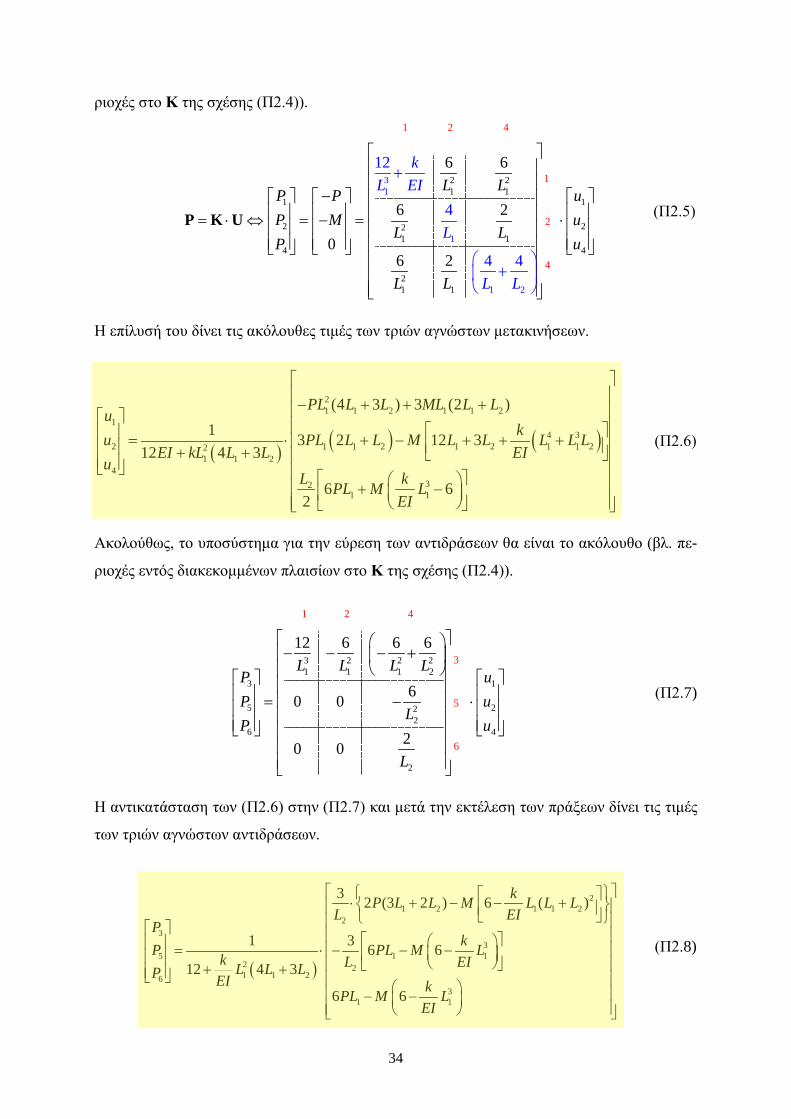
ριοχές στο Κ της σχέσης (Π2.4)).
2 21 1
1
31
1
1
2 2
1 1 2
1 14
2
1 2 4
6 6
6 2
06
1
42
2
4
4
L LP PP M
L
kL EI
L
L
LP
L L L
− = ⋅ ⇔ = − =
+
+
P K U1
2
4
1
2
4
II u
uu
⋅
(Π2.5)
Η επίλυσή του δίνει τις ακόλουθες τιμές των τριών αγνώστων μετακινήσεων.
( ) ( ) ( )
21 1
13
2 1 1 2 1 2 1 121 1 2
42
1 1
1 2 1 2
42
3
31 3 2 12
(4 3 ) (2
312 4 3
62
)
6
PL MLu
ku PL L L M L L L LEI kL L L EI
uL kP
L L L L
L M LEI
L
− = ⋅ + − + + + +
+ + +
+ +
−
(Π2.6)
Ακολούθως, το υποσύστημα για την εύρεση των αντιδράσεων θα είναι το ακόλουθο (βλ. πε-
ριοχές εντός διακεκομμένων πλαισίων στο Κ της σχέσης (Π2.4)).
3 1
5 2
3 2 2 21 1 1 2
2
42
6
2
1 2 4
3
5
6
12 6 6 6
60 0
20
I
0
IL L L L
P uP uP u
L
L
=
− − − +
− ⋅
(Π2.7)
Η αντικατάσταση των (Π2.6) στην (Π2.7) και μετά την εκτέλεση των πράξεων δίνει τις τιμές
των τριών αγνώστων αντιδράσεων.
( )
21 2 11
23
35 1 1
2 216
31 1
2
1 2
(33 2 6
1 3 6 612 4 3
6
2 ) (
6
)kP M LL EI
PkP PL M Lk L EIL L LP EI kP
L L L
M LEI
L
L
⋅ − −
+ +
= ⋅ − − − + + − −
(Π2.8)
34
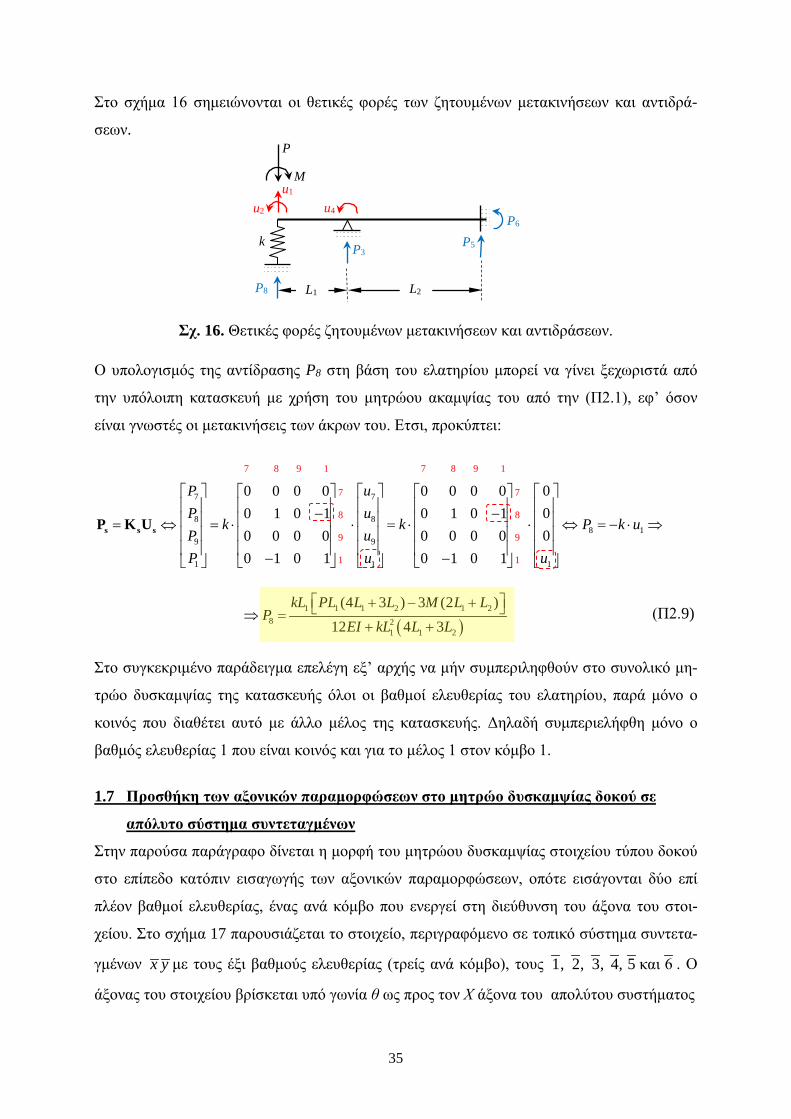
Στο σχήμα 16 σημειώνονται οι θετικές φορές των ζητουμένων μετακινήσεων και αντιδρά-
σεων.
Σχ. 16. Θετικές φορές ζητουμένων μετακινήσεων και αντιδράσεων. Ο υπολογισμός της αντίδρασης P8 στη βάση του ελατηρίου μπορεί να γίνει ξεχωριστά από
την υπόλοιπη κατασκευή με χρήση του μητρώου ακαμψίας του από την (Π2.1), εφ’ όσον
είναι γνωστές οι μετακινήσεις των άκρων του. Ετσι, προκύπτει:
7
8
9
1
7 8 9 1 7 8 9 1
0 0 0 00 1 0 10 0 0 0
PP
kPP
− = ⇔ = ⋅
s s sP K U
7
88 1
9
1 1
7 7
8 8
9 9
1 1
00 0 0 000 1 0 1
00 0 0 0
0 1 0 1 0 1 0 1
uu
k P k uuu u
− ⋅ = ⋅ ⋅ ⇔ = − ⋅ ⇒ − −
( )
1 2 11 121
2
28
1
(4 3 ) (3 212
)4 3
kL PL ML LEI kL L
LL
LP
+ − + + +
⇒ = (Π2.9)
Στο συγκεκριμένο παράδειγμα επελέγη εξ’ αρχής να μήν συμπεριληφθούν στο συνολικό μη-
τρώο δυσκαμψίας της κατασκευής όλοι οι βαθμοί ελευθερίας του ελατηρίου, παρά μόνο ο
κοινός που διαθέτει αυτό με άλλο μέλος της κατασκευής. Δηλαδή συμπεριελήφθη μόνο ο
βαθμός ελευθερίας 1 που είναι κοινός και για το μέλος 1 στον κόμβο 1.
1.7 Προσθήκη των αξονικών παραμορφώσεων στο μητρώο δυσκαμψίας δοκού σε
απόλυτο σύστημα συντεταγμένων
Στην παρούσα παράγραφο δίνεται η μορφή του μητρώου δυσκαμψίας στοιχείου τύπου δοκού
στο επίπεδο κατόπιν εισαγωγής των αξονικών παραμορφώσεων, οπότε εισάγονται δύο επί
πλέον βαθμοί ελευθερίας, ένας ανά κόμβο που ενεργεί στη διεύθυνση του άξονα του στοι-
χείου. Στο σχήμα 17 παρουσιάζεται το στοιχείο, περιγραφόμενο σε τοπικό σύστημα συντετα-
γμένων x y με τους έξι βαθμούς ελευθερίας (τρείς ανά κόμβο), τους 1, 2, 3, 4, 5 και 6 . Ο
άξονας του στοιχείου βρίσκεται υπό γωνία θ ως προς τον Χ άξονα του απολύτου συστήματος
u1
L1 L2
M
k
P
u2 u4
P3 P5
P6
P8
35
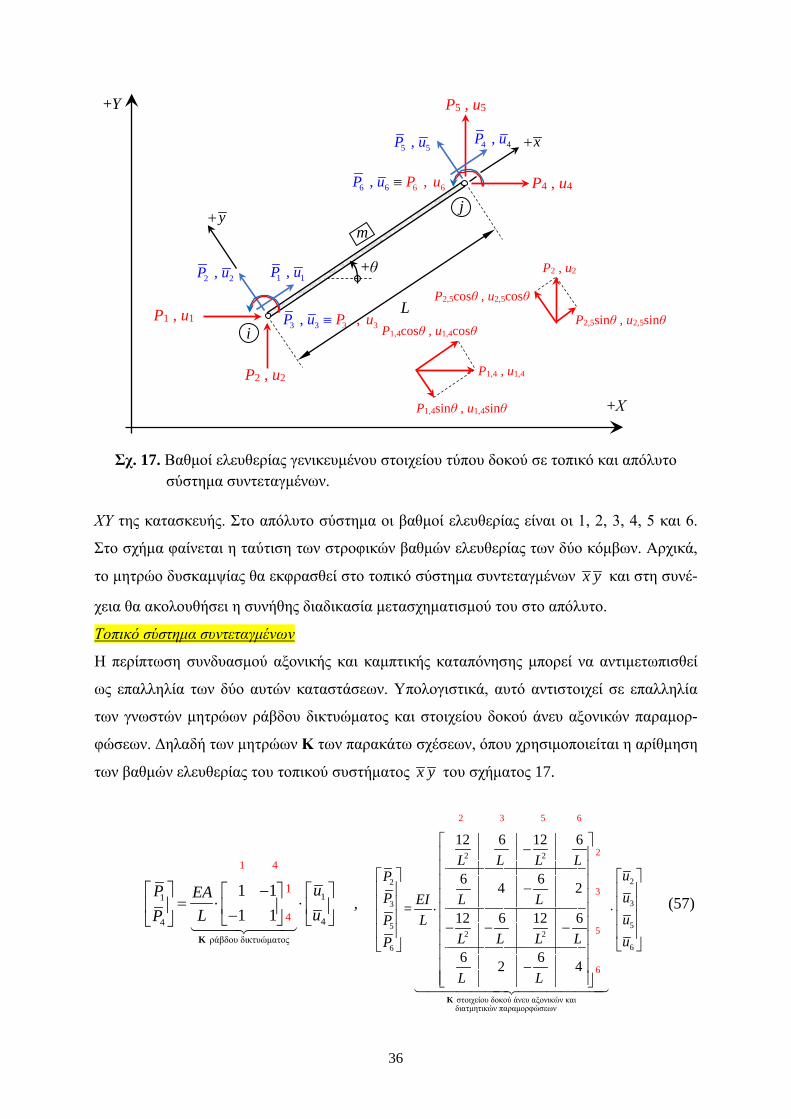
Σχ. 17. Βαθμοί ελευθερίας γενικευμένου στοιχείου τύπου δοκού σε τοπικό και απόλυτο σύστημα συντεταγμένων. ΧΥ της κατασκευής. Στο απόλυτο σύστημα οι βαθμοί ελευθερίας είναι οι 1, 2, 3, 4, 5 και 6.
Στο σχήμα φαίνεται η ταύτιση των στροφικών βαθμών ελευθερίας των δύο κόμβων. Αρχικά,
το μητρώο δυσκαμψίας θα εκφρασθεί στο τοπικό σύστημα συντεταγμένων x y και στη συνέ-
χεια θα ακολουθήσει η συνήθης διαδικασία μετασχηματισμού του στο απόλυτο.
Τοπικό σύστημα συντεταγμένων
Η περίπτωση συνδυασμού αξονικής και καμπτικής καταπόνησης μπορεί να αντιμετωπισθεί
ως επαλληλία των δύο αυτών καταστάσεων. Υπολογιστικά, αυτό αντιστοιχεί σε επαλληλία
των γνωστών μητρώων ράβδου δικτυώματος και στοιχείου δοκού άνευ αξονικών παραμορ-
φώσεων. Δηλαδή των μητρώων Κ των παρακάτω σχέσεων, όπου χρησιμοποιείται η αρίθμηση
των βαθμών ελευθερίας του τοπικού συστήματος x y του σχήματος 17.
11
44
ράβδου δικτυώματος
1 4
4
1
1 11 1
1 uP EAuLP
− = ⋅ ⋅ −
K
,
2 2
2
3
52 2
6
στοιχείου δοκού
2 3 5 6
2
3
5
6
12 6 12 6
6 64 2 = 12
1
6 12 6
6
1
62 4
L L L LPP EI L L
LPL L L LP
L L
− − ⋅ − − −
−
K
2
3
5
6
άνευ αξονικών και διατμητικών παραμορφώσεων
uuuu
⋅
(57)
2 2 , P u
i
j m
L
+Χ
x+
y+
+θ
3 33 3 , , PP u u≡
5 5 , P u
6 6 6 6 , , P Pu u≡
P1 , u1
P2 , u2
P4 , u4
P5 , u5 +Y
1 1 , P u
4 4 , P u
P1,4 , u1,4
P1,4cosθ , u1,4cosθ
P1,4sinθ , u1,4sinθ
P2 , u2
P2,5sinθ , u2,5sinθ
P2,5cosθ , u2,5cosθ
36
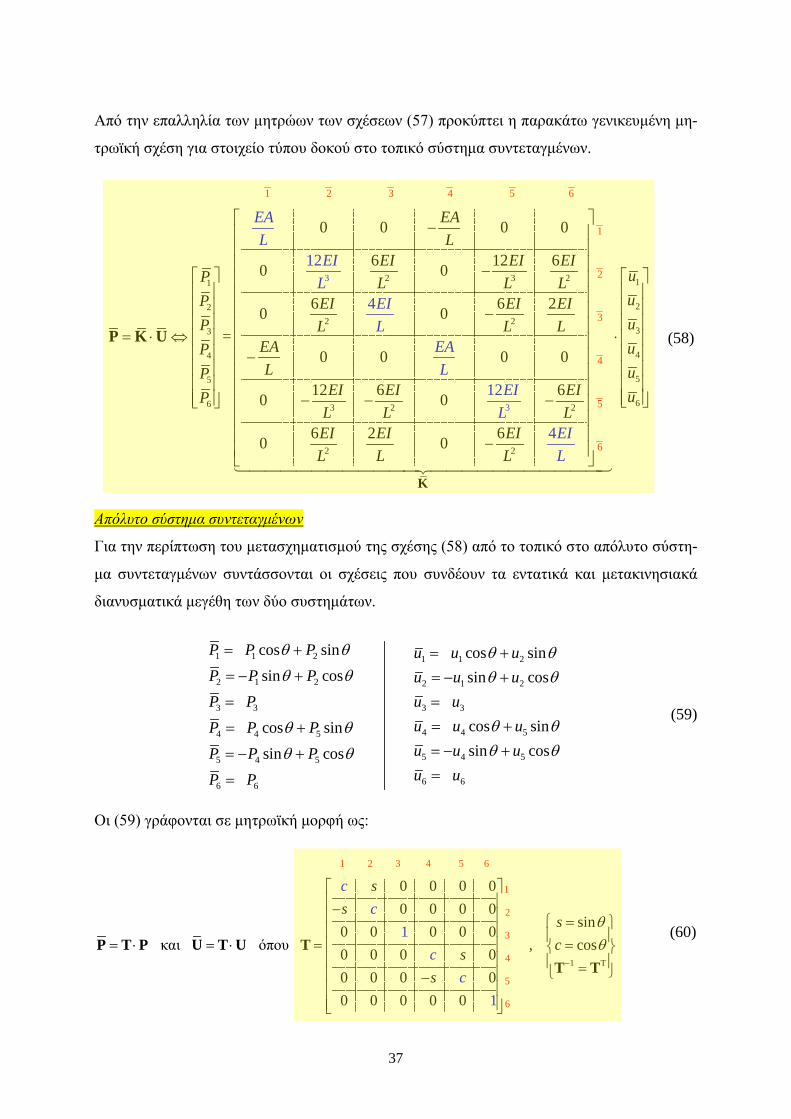
Από την επαλληλία των μητρώων των σχέσεων (57) προκύπτει η παρακάτω γενικευμένη μη-
τρωϊκή σχέση για στοιχείο τύπου δοκού στο τοπικό σύστημα συντεταγμένων.
1
2
3
4
5
6
1 2 3 4 5 6
PPPPPP
= ⋅ ⇔
P K U
2 3 2 1
22 2
3 2 2
2 2
3
3
1
2
3
4
5
6
0 0 0 0
6 12 60 0
6 6 20 0 =
0 0 0 0
12 6 60 0
6 2 60 0
12
11
4
12
4
EAL
EI EI EIuL L LuEI EI EIuL L L
EAL
EI EI EI
EAL
EI
L L LEI EI EIL L L
LEIL
EAL
EIL
EIL
− − − ⋅
− − − −
−
K
3
4
5
6
uuu
(58)
Απόλυτο σύστημα συντεταγμένων
Για την περίπτωση του μετασχηματισμού της σχέσης (58) από το τοπικό στο απόλυτο σύστη-
μα συντεταγμένων συντάσσονται οι σχέσεις που συνδέουν τα εντατικά και μετακινησιακά
διανυσματικά μεγέθη των δύο συστημάτων.
1 1 2 1 1 2
2 1 2 2 1 2
3 3 3 3
4 4 54 4 5
5 4 55 4 5
6 66 6
cos sin cos sinsin cos sin cos
cos sin cos sin
sin cossin cos
P P P u u uP P P u u uP P u u
u u uP P Pu u uP P Pu uP P
θ θ θ θθ θ θ θ
θ θθ θθ θθ θ
= + = += − + = − += =
= += += − += − +==
(59)
Οι (59) γράφονται σε μητρωϊκή μορφή ως:
1 2 3 4 5 6
0 0 0 00 0 0 0
0 0 0 0 0 και όπου
1 0
c scs−
= ⋅ = ⋅ =P T P U T U T1 T
1
2
3
4
5
6
sin , cos0 0 0
0 0 0 00 0 0 10 0
1
scs
csc
θθ
−
= = = −
T T
(60)
37
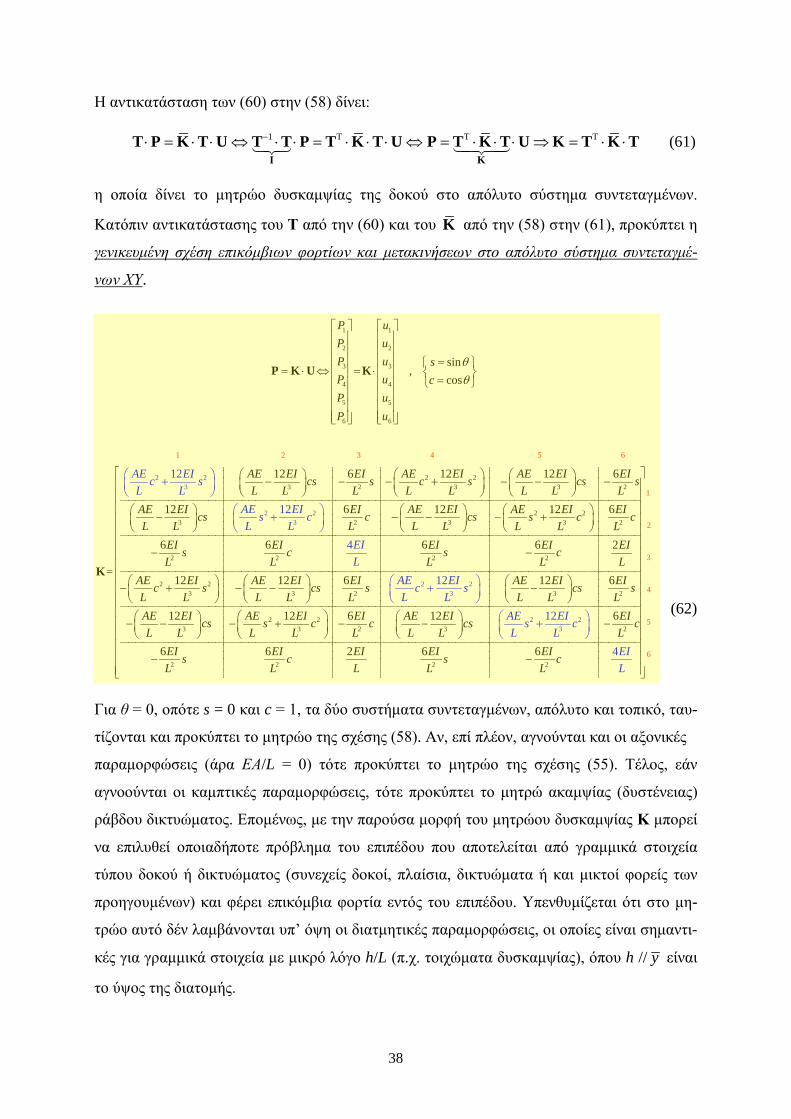
Η αντικατάσταση των (60) στην (58) δίνει: 1 T T T−⋅ = ⋅ ⋅ ⇔ ⋅ ⋅ = ⋅ ⋅ ⋅ ⇔ = ⋅ ⋅ ⋅ ⇒ = ⋅ ⋅
I KT P K T U T T P T K T U P T K T U K T K T
(61)
η οποία δίνει το μητρώο δυσκαμψίας της δοκού στο απόλυτο σύστημα συντεταγμένων.
Κατόπιν αντικατάστασης του Τ από την (60) και του K από την (58) στην (61), προκύπτει η
γενικευμένη σχέση επικόμβιων φορτίων και μετακινήσεων στο απόλυτο σύστημα συντεταγμέ-
νων ΧΥ.
1 1
2 2
3 3
4 4
5 5
6 6
sin ,
cos
P uP uP u sP u cP uP u
θθ
=
= ⋅ ⇔ = ⋅ =
P K U K
1 2 3 4
2 2 2 23 23 3 3 2
3 23 32 2
5 6
12 6 12 12 6
1
12
122 6 12
=
AE EI EI AE EI AE EI EIcs s c s cs sL L L L L L L L
AE EI EI
AE EIc sL L
AE EI AE EIcs cL L L L
s cL L L
− − − + − − −
− − −
+
+
K
2 23 2
2 2 2 2
2 23 3 2 3 2
2 23 3 2
2 23
12 6
6 6 6 6 2
12 12 6 12 6
12 6
4
1
12
2
AE EI EIcs s c cL L L
EI EI EI EI EIs c s cL L L L L
AE EI AE EI EI AE EI EIc s cs s cs sL L L L L L L LAE EI AE EI EIcs s c
EIL
AE
L L
EIc sL L
L L L
− +
− −
− + − − −
+
− − − + − 3 2
2 2 2
2 23
2
1
2
3
4
5
6
12 6
6 6 2 6
I
4
I
12
6
AE EI EIc cs cL L L
EI EI EI EI EIs c s cL L
AE EIs cL L
L LEILL
− −
−
+
−
(62)
Για θ = 0, οπότε s = 0 και c = 1, τα δύο συστήματα συντεταγμένων, απόλυτο και τοπικό, ταυ-
τίζονται και προκύπτει το μητρώο της σχέσης (58). Αν, επί πλέον, αγνούνται και οι αξονικές
παραμορφώσεις (άρα ΕΑ/L = 0) τότε προκύπτει το μητρώο της σχέσης (55). Τέλος, εάν
αγνοούνται οι καμπτικές παραμορφώσεις, τότε προκύπτει το μητρώ ακαμψίας (δυστένειας)
ράβδου δικτυώματος. Επομένως, με την παρούσα μορφή του μητρώου δυσκαμψίας Κ μπορεί
να επιλυθεί οποιαδήποτε πρόβλημα του επιπέδου που αποτελείται από γραμμικά στοιχεία
τύπου δοκού ή δικτυώματος (συνεχείς δοκοί, πλαίσια, δικτυώματα ή και μικτοί φορείς των
προηγουμένων) και φέρει επικόμβια φορτία εντός του επιπέδου. Υπενθυμίζεται ότι στο μη-
τρώο αυτό δέν λαμβάνονται υπ’ όψη οι διατμητικές παραμορφώσεις, οι οποίες είναι σημαντι-
κές για γραμμικά στοιχεία με μικρό λόγο h/L (π.χ. τοιχώματα δυσκαμψίας), όπου h // y είναι
το ύψος της διατομής.
38
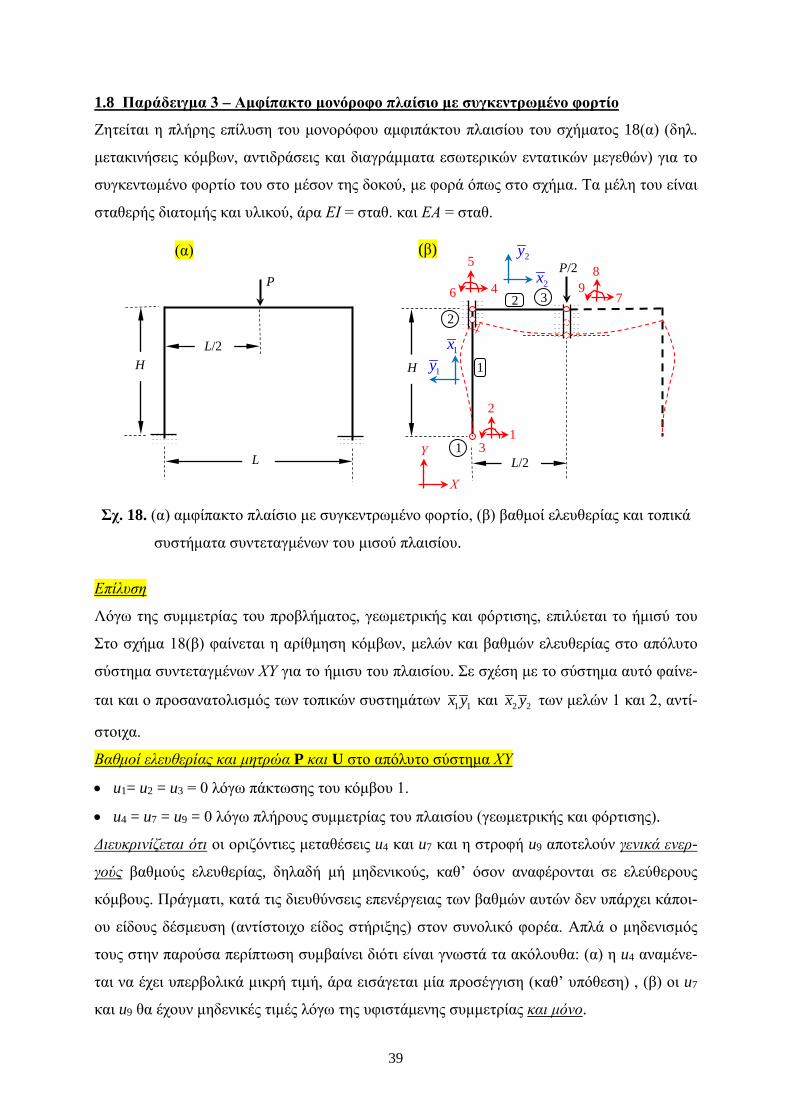
1.8 Παράδειγμα 3 – Αμφίπακτο μονόροφο πλαίσιο με συγκεντρωμένο φορτίο
Ζητείται η πλήρης επίλυση του μονορόφου αμφιπάκτου πλαισίου του σχήματος 18(α) (δηλ.
μετακινήσεις κόμβων, αντιδράσεις και διαγράμματα εσωτερικών εντατικών μεγεθών) για το
συγκεντωμένο φορτίο του στο μέσον της δοκού, με φορά όπως στο σχήμα. Τα μέλη του είναι
σταθερής διατομής και υλικού, άρα ΕΙ = σταθ. και ΕΑ = σταθ.
Σχ. 18. (α) αμφίπακτο πλαίσιο με συγκεντρωμένο φορτίο, (β) βαθμοί ελευθερίας και τοπικά
συστήματα συντεταγμένων του μισού πλαισίου.
Επίλυση
Λόγω της συμμετρίας του προβλήματος, γεωμετρικής και φόρτισης, επιλύεται το ήμισύ του
Στο σχήμα 18(β) φαίνεται η αρίθμηση κόμβων, μελών και βαθμών ελευθερίας στο απόλυτο
σύστημα συντεταγμένων ΧΥ για το ήμισυ του πλαισίου. Σε σχέση με το σύστημα αυτό φαίνε-
ται και ο προσανατολισμός των τοπικών συστημάτων 1 1x y και 2 2x y των μελών 1 και 2, αντί-
στοιχα.
Βαθμοί ελευθερίας και μητρώα P και U στο απόλυτο σύστημα ΧΥ
• u1= u2 = u3 = 0 λόγω πάκτωσης του κόμβου 1.
• u4 = u7 = u9 = 0 λόγω πλήρους συμμετρίας του πλαισίου (γεωμετρικής και φόρτισης).
Διευκρινίζεται ότι οι οριζόντιες μεταθέσεις u4 και u7 και η στροφή u9 αποτελούν γενικά ενερ-
γούς βαθμούς ελευθερίας, δηλαδή μή μηδενικούς, καθ’ όσον αναφέρονται σε ελεύθερους
κόμβους. Πράγματι, κατά τις διευθύνσεις επενέργειας των βαθμών αυτών δεν υπάρχει κάποι-
ου είδους δέσμευση (αντίστοιχο είδος στήριξης) στον συνολικό φορέα. Απλά ο μηδενισμός
τους στην παρούσα περίπτωση συμβαίνει διότι είναι γνωστά τα ακόλουθα: (α) η u4 αναμένε-
ται να έχει υπερβολικά μικρή τιμή, άρα εισάγεται μία προσέγγιση (καθ’ υπόθεση) , (β) οι u7
και u9 θα έχουν μηδενικές τιμές λόγω της υφιστάμενης συμμετρίας και μόνο.
1
L/2
L
P
H
L/2
P/2
H
2
3
4
5
6 7
8 9
1
2 3
1
2
(α) (β)
Χ
Υ
1x
1y
2x
2y
39
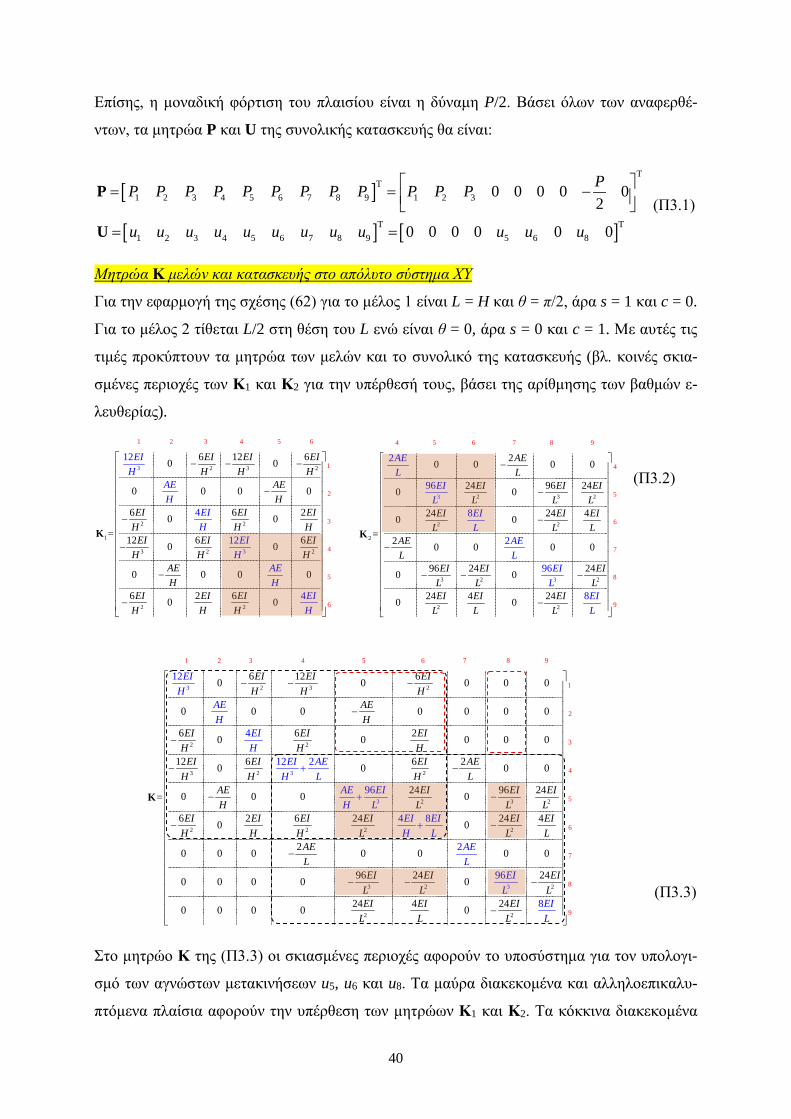
Επίσης, η μοναδική φόρτιση του πλαισίου είναι η δύναμη P/2. Βάσει όλων των αναφερθέ-
ντων, τα μητρώα P και U της συνολικής κατασκευής θα είναι:
[ ]
[ ] [ ]
TT
1 2 3 4 5 6 7 8 9 1 2 3
T T1 2 3 4 5 6 7 8 9 5 6 8
0 0 0 0 02
0 0 0 0 0 0
PP P P P P P P P P P P P
u u u u u u u u u u u u
= = −
= =
P
U
(Π3.1)
Μητρώα Κ μελών και κατασκευής στο απόλυτο σύστημα ΧΥ
Για την εφαρμογή της σχέσης (62) για το μέλος 1 είναι L = H και θ = π/2, άρα s = 1 και c = 0.
Για το μέλος 2 τίθεται L/2 στη θέση του L ενώ είναι θ = 0, άρα s = 0 και c = 1. Με αυτές τις
τιμές προκύπτουν τα μητρώα των μελών και το συνολικό της κατασκευής (βλ. κοινές σκια-
σμένες περιοχές των Κ1 και Κ2 για την υπέρθεσή τους, βάσει της αρίθμησης των βαθμών ε-
λευθερίας).
2 3 2
2 2
1
3 2
3
1 2 3 4 5 6
6 12 612 0 0
0 0 0 0
6 6 20 4 0= 12 0 16 2
EIH
AEH
E
EI EI EIH H H
AEH
EI EI EIH H H
EI EIH
I
EIH
H
− − −
−
−
−K
2
2 2
3
1
2
3
4
5
6
60
0 0 0 0
6 2 60
II
40
EIH
AEH
EI EI EIH
H
IHHE
H
AEH
− −
2 3 2
2
2
3
2
4 5 6 7 8 9
20 0 0 0
24 96 240 0
24 24 40 8 0
2
96
= 2
AEL
EIL
EIL
AEL
EI EI EIL L L
EI EI EIL L L
−
−
−
−K
3 2 2
2 2
3
4
5
6
7
8
9
2
96
0 0 0 0
96 24 240 0
24 4 240 8
II
0
AEL
EI EI EIL L LEI EI EI
L L
AEL
EIL
EILL
− − − −
(Π3.2)
1 2 3 4 5 6 7 8
2 3 2
2 2
3 2 2
2 3 2
2 2
3
3
2
3
9
6 12 60 0 0 0 0
0 0 0 0 0 0 0
6 6 20 0 0 0 0
12 6 6 20 0 0 0
24 96 240 0 0 0=
6 2 6
12
4
12 2
96
24 24080 4
EI EI EIH H H
AEH
EI EI EIH H H
EI EI EI AEH H H L
AE EI EI EI
EIH
AEH
EIH
EI AEH L
AE EIH L
EI EIH
H L L LEI EI EI EI
H H H L L
− − −
−
−
+
+
− −
− −
− −+
K
3
2
3 2 2
2 2
1
2
3
4
5
6
7
8
9
4
20 0 0 0 0 0 0
96
2
9624 240 0 0 0 0
24 4 240 0 0 0
II
80
EI EIL L
AEL
EI EI EIL L LEI EI EI
L L
AEL
EIL
EILL
− − − −
−
(Π3.3)
Στο μητρώο Κ της (Π3.3) οι σκιασμένες περιοχές αφορούν το υποσύστημα για τον υπολογι-
σμό των αγνώστων μετακινήσεων u5, u6 και u8. Τα μαύρα διακεκομένα και αλληλοεπικαλυ-
πτόμενα πλαίσια αφορούν την υπέρθεση των μητρώων Κ1 και Κ2. Τα κόκκινα διακεκομένα
40
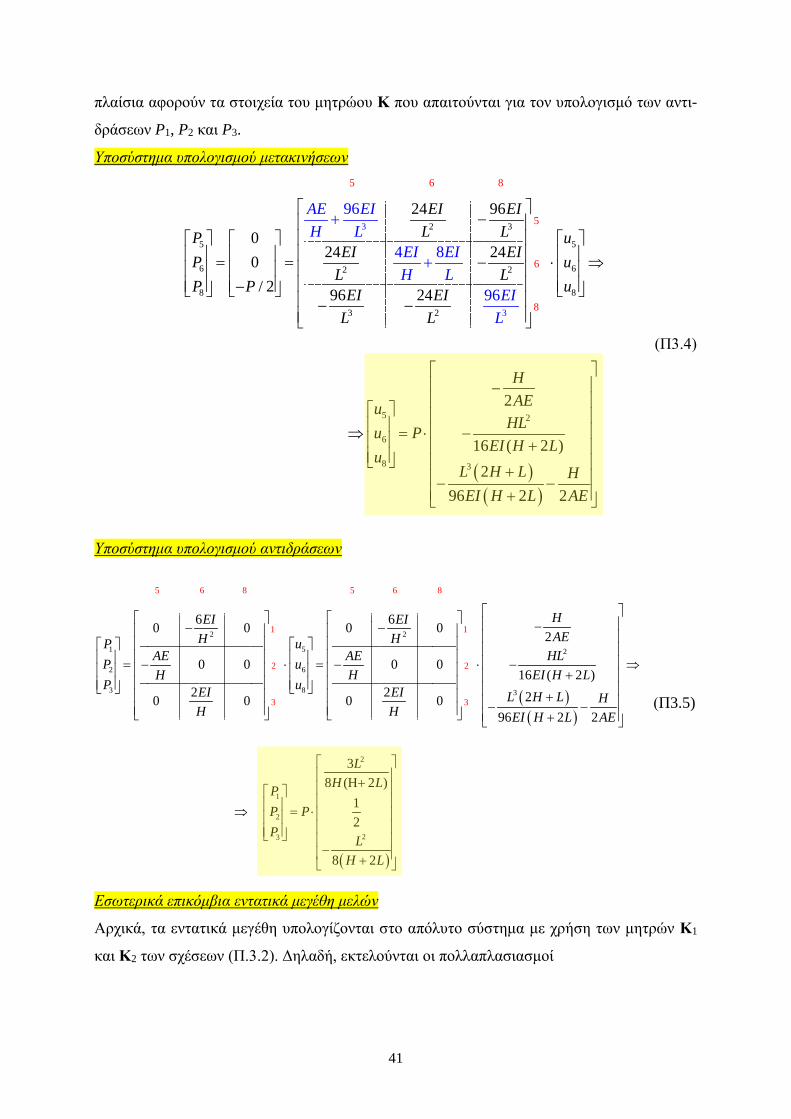
πλαίσια αφορούν τα στοιχεία του μητρώου Κ που απαιτούνται για τον υπολογισμό των αντι-
δράσεων P1, P2 και P3.
Υποσύστημα υπολογισμού μετακινήσεων
2 33
8
2 2
5
6
5 6 8
96
4 8
24 96
24 24
9
00/ 2 6
AE EIHP
PP
LEI EI
EI EIL L
EI EL
EH
PLL
I
+ = = −
−
−+
−
( )( )
3 2
5
6
8
5 2
6
8
3
3
5
6
8
2
2 9
16 ( 2 )
296 2 2
4 6
II
EI
uuu
HAEu
HLu PEI H L
uL H L HEI H L A
LI EI
L
E
L
⇒
− ⇒ = ⋅ − +
+− −
+
⋅ −
(Π3.4)
Υποσύστημα υπολογισμού αντιδράσεων
2
2
1
3
5 6 8 5 6 8
60 0
0 0
20 0
PPP
EIH
AEH
EIH
−
−
= ( )
( )
5 2
6
8 3
2
1
2
3
21 1
2 2
3 3
2
16 ( 2 )2
96 2 2
38 (H
60 0
0 0
I II
0
I
0
2
HAEu
HLuEI H L
uL H L HEI H
EI
L
H
AE
AE
LHP
P PP
HEIH
−
− = − ⇒ + + − − +
⇒ = ⋅
⋅ − ⋅
( )2
2 )12
8 2
L
LH L
+ − +
(Π3.5)
Εσωτερικά επικόμβια εντατικά μεγέθη μελών
Αρχικά, τα εντατικά μεγέθη υπολογίζονται στο απόλυτο σύστημα με χρήση των μητρών Κ1
και Κ2 των σχέσεων (Π.3.2). Δηλαδή, εκτελούνται οι πολλαπλασιασμοί
41
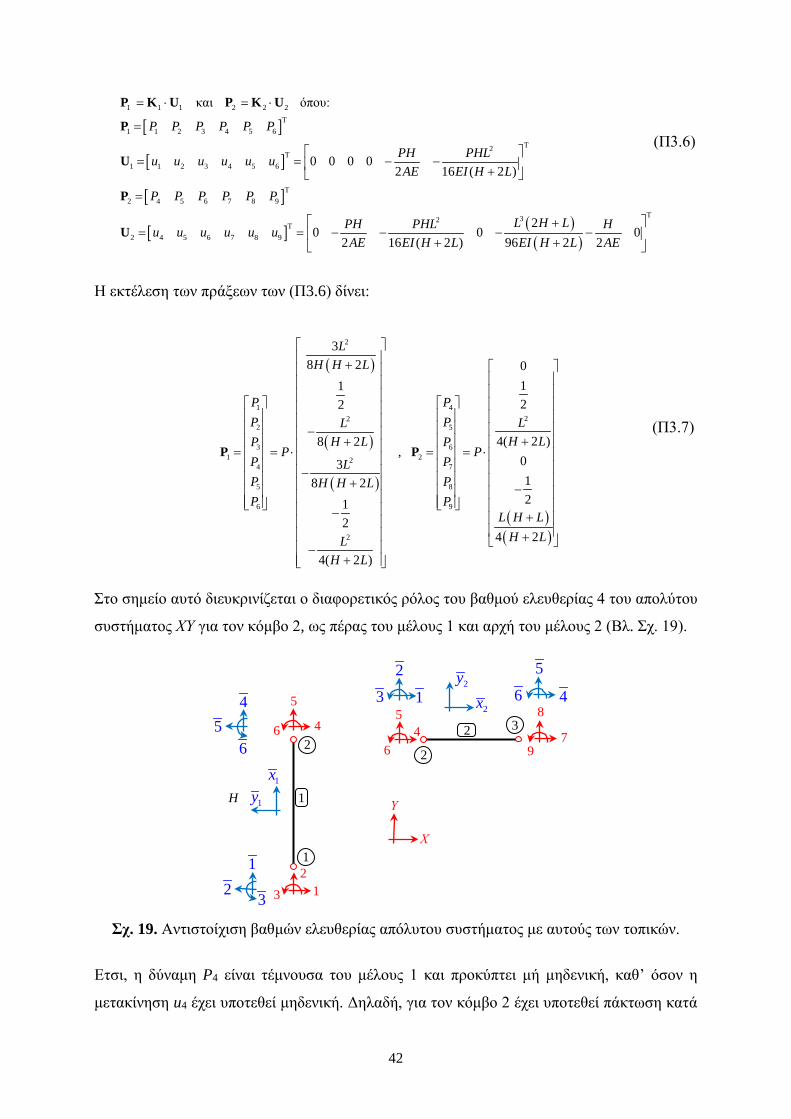
[ ]
[ ]
[ ]
[ ] ( )( )
1 1 1 2 2 2T
1 1 2 3 4 5 6
TT
1 1 2 3 4 5 6
T2 4 5 6 7 8 9
TT
2
2
4 5 6 7 8
2
9
3
και όπου:
2 16 ( 2 )
22 16 ( 2 )
0 0 0 0
0 0 096 2 2
P P P P P P
u u u u u u
P P
PH PHLAE EI H L
L H LPH PHL HAE EI H L EI H L A
P P P P
u u u uE
u u
= ⋅ = ⋅
=
= = − −
+
+− − − −
+ +
=
= =
P K U P K U
P
U
P
U
(Π3.6)
Η εκτέλεση των πράξεων των (Π3.6) δίνει:
( )
( )
( )
( )( )
2
21 4
2 5
3 61 2
4 7
5 8
6
2
2
9
2
38 2
1122
4( 2 )8 20318 221
0
,
24 2
4
( 2
)
LH H L
LLH LH L
LH H L
L H LH LL
H L
P PP PP P
P PP PP PP P
= = ⋅ = = ⋅
+
−++
−+ −
− ++
−+
P P
(Π3.7)
Στο σημείο αυτό διευκρινίζεται ο διαφορετικός ρόλος του βαθμού ελευθερίας 4 του απολύτου
συστήματος ΧΥ για τον κόμβο 2, ως πέρας του μέλους 1 και αρχή του μέλους 2 (Βλ. Σχ. 19).
Σχ. 19. Αντιστοίχιση βαθμών ελευθερίας απόλυτου συστήματος με αυτούς των τοπικών.
Ετσι, η δύναμη P4 είναι τέμνουσα του μέλους 1 και προκύπτει μή μηδενική, καθ’ όσον η
μετακίνηση u4 έχει υποτεθεί μηδενική. Δηλαδή, για τον κόμβο 2 έχει υποτεθεί πάκτωση κατά
1
H
2 3
4
5
6 7
8
9
1
2 3
1
2
Χ
Υ
1x
1y
2x 2y
4 5
6 2
1
2 3
4
5
6
1
2
3 4
5
6
42
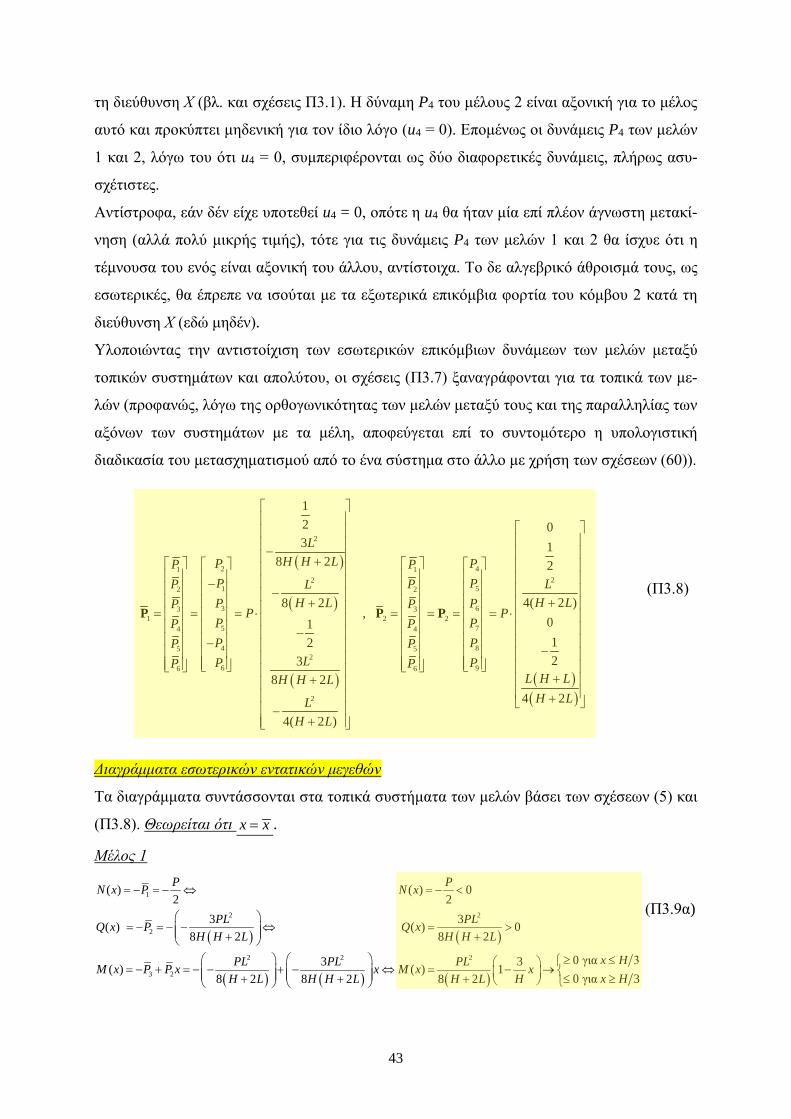
τη διεύθυνση Χ (βλ. και σχέσεις Π3.1). Η δύναμη P4 του μέλους 2 είναι αξονική για το μέλος
αυτό και προκύπτει μηδενική για τον ίδιο λόγο (u4 = 0). Επομένως οι δυνάμεις P4 των μελών
1 και 2, λόγω του ότι u4 = 0, συμπεριφέρονται ως δύο διαφορετικές δυνάμεις, πλήρως ασυ-
σχέτιστες.
Αντίστροφα, εάν δέν είχε υποτεθεί u4 = 0, οπότε η u4 θα ήταν μία επί πλέον άγνωστη μετακί-
νηση (αλλά πολύ μικρής τιμής), τότε για τις δυνάμεις P4 των μελών 1 και 2 θα ίσχυε ότι η
τέμνουσα του ενός είναι αξονική του άλλου, αντίστοιχα. Το δε αλγεβρικό άθροισμά τους, ως
εσωτερικές, θα έπρεπε να ισούται με τα εξωτερικά επικόμβια φορτία του κόμβου 2 κατά τη
διεύθυνση Χ (εδώ μηδέν).
Υλοποιώντας την αντιστοίχιση των εσωτερικών επικόμβιων δυνάμεων των μελών μεταξύ
τοπικών συστημάτων και απολύτου, οι σχέσεις (Π3.7) ξαναγράφονται για τα τοπικά των με-
λών (προφανώς, λόγω της ορθογωνικότητας των μελών μεταξύ τους και της παραλληλίας των
αξόνων των συστημάτων με τα μέλη, αποφεύγεται επί το συντομότερο η υπολογιστική
διαδικασία του μετασχηματισμού από το ένα σύστημα στο άλλο με χρήση των σχέσεων (60)).
( )
( )
( )
2
21 1
12 2
33 31 2 2
54 4
45 5
6
2
2
2
6 6
123
8 2
8 212
38 2
,
4( 2 )
LH H L
LH L
LH H L
LH
P PP PPP PPP P
PPP PPP P
P P
L
P
− = = = ⋅ = = = −
−+
−+
−
+
+ −
P P P
( )( )
4
5
6
7
8
9
2
12
4( 2
0
)012
4 2
LH L
L H LH
P
L
PP
PPP
= ⋅
+
−
+ +
(Π3.8)
Διαγράμματα εσωτερικών εντατικών μεγεθών
Τα διαγράμματα συντάσσονται στα τοπικά συστήματα των μελών βάσει των σχέσεων (5) και
(Π3.8). Θεωρείται ότι x x= .
Μέλος 1
( ) ( )
( )
1
2
3 2
2 2
23 3
8
( ) ( ) 02 2
(2 8 2
) ( ) 0
( )8 2
P PN x P N x
Q x P Q x
M x P P
PL PLH H L H H L
PLH L
x
− ⇔ > + +
= − = − ⇔ = − <
= − = − =
= − + =
−+
−
( ) ( )2 2 0 για 33 31
0 για 2 8( )
38 2x HPL PLx xx HH H L H H
xL
M ≥ ≤ + − ⇔ − → ≤ ≥+ +
=
(Π3.9α)
43
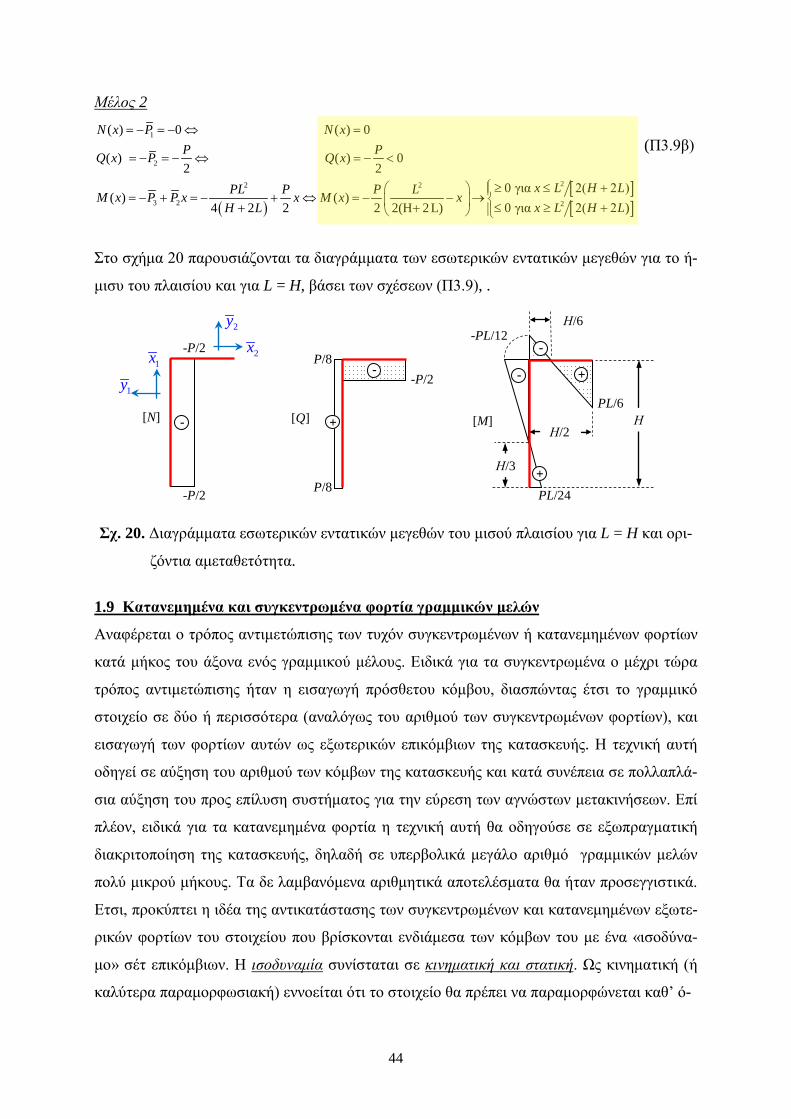
Μέλος 2
( )[ ]
1
2
3
2 2
2
2
2
( ) 0
0 για 2( 2 )0
( ) 0
( ) ( ) 02 2
( )για 2( 24 2 2 2 2(H 2 L)
( )
N x P N xP PQ x
x L H LPL P Lx xx L HH
P Q x
PM xL
P P x M x
⇔
≥ ≤ + + ⇔ − →
= − = − ⇔ =
= − = − = − <
= − + = − = −≤ ≥ ++ + [ ])L
(Π3.9β)
Στο σχήμα 20 παρουσιάζονται τα διαγράμματα των εσωτερικών εντατικών μεγεθών για το ή-
μισυ του πλαισίου και για L = H, βάσει των σχέσεων (Π3.9), .
Σχ. 20. Διαγράμματα εσωτερικών εντατικών μεγεθών του μισού πλαισίου για L = H και ορι-
ζόντια αμεταθετότητα.
1.9 Κατανεμημένα και συγκεντρωμένα φορτία γραμμικών μελών
Αναφέρεται ο τρόπος αντιμετώπισης των τυχόν συγκεντρωμένων ή κατανεμημένων φορτίων
κατά μήκος του άξονα ενός γραμμικού μέλους. Ειδικά για τα συγκεντρωμένα ο μέχρι τώρα
τρόπος αντιμετώπισης ήταν η εισαγωγή πρόσθετου κόμβου, διασπώντας έτσι το γραμμικό
στοιχείο σε δύο ή περισσότερα (αναλόγως του αριθμού των συγκεντρωμένων φορτίων), και
εισαγωγή των φορτίων αυτών ως εξωτερικών επικόμβιων της κατασκευής. Η τεχνική αυτή
οδηγεί σε αύξηση του αριθμού των κόμβων της κατασκευής και κατά συνέπεια σε πολλαπλά-
σια αύξηση του προς επίλυση συστήματος για την εύρεση των αγνώστων μετακινήσεων. Επί
πλέον, ειδικά για τα κατανεμημένα φορτία η τεχνική αυτή θα οδηγούσε σε εξωπραγματική
διακριτοποίηση της κατασκευής, δηλαδή σε υπερβολικά μεγάλο αριθμό γραμμικών μελών
πολύ μικρού μήκους. Τα δε λαμβανόμενα αριθμητικά αποτελέσματα θα ήταν προσεγγιστικά.
Ετσι, προκύπτει η ιδέα της αντικατάστασης των συγκεντρωμένων και κατανεμημένων εξωτε-
ρικών φορτίων του στοιχείου που βρίσκονται ενδιάμεσα των κόμβων του με ένα «ισοδύνα-
μο» σέτ επικόμβιων. Η ισοδυναμία συνίσταται σε κινηματική και στατική. Ως κινηματική (ή
καλύτερα παραμορφωσιακή) εννοείται ότι το στοιχείο θα πρέπει να παραμορφώνεται καθ’ ό-
[N] -
-P/2
-P/2
[Q]
P/8
P/8
+
- -P/2
+
-
PL/24
-PL/12 -
+
PL/6 [M]
Η/3
Η/6
Η/2 Η
1x
1y
2x
2y
44
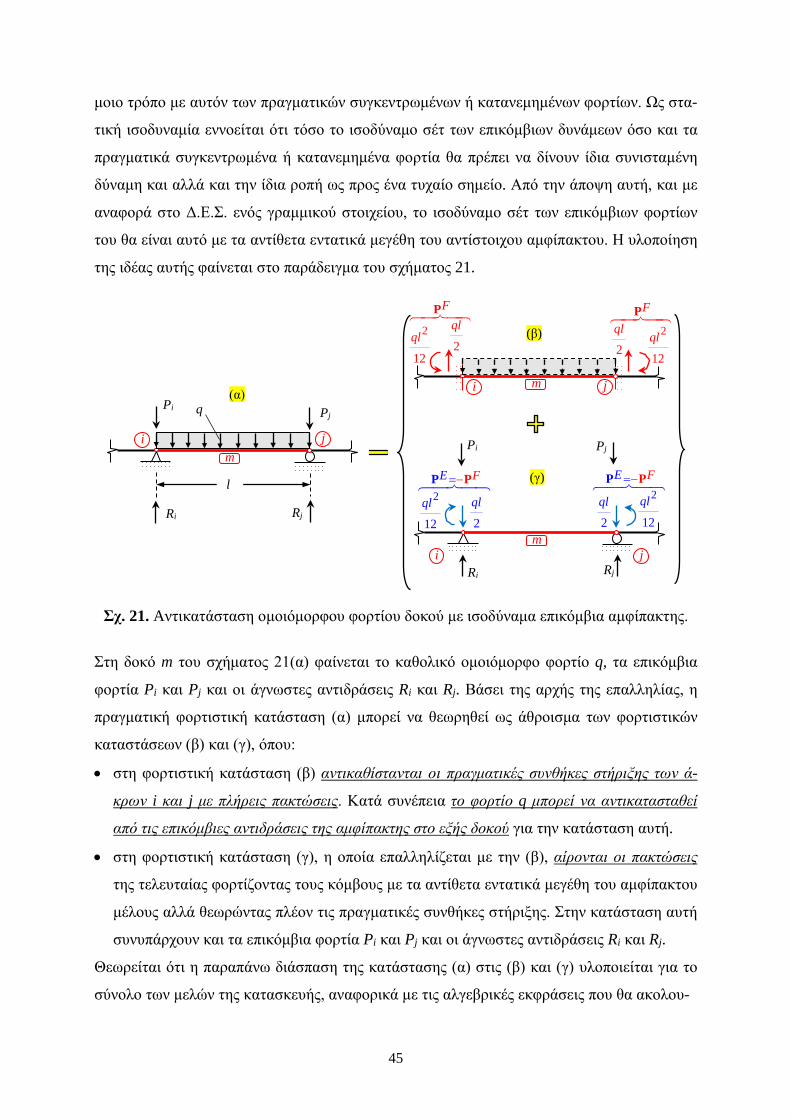
μοιο τρόπο με αυτόν των πραγματικών συγκεντρωμένων ή κατανεμημένων φορτίων. Ως στα-
τική ισοδυναμία εννοείται ότι τόσο το ισοδύναμο σέτ των επικόμβιων δυνάμεων όσο και τα
πραγματικά συγκεντρωμένα ή κατανεμημένα φορτία θα πρέπει να δίνουν ίδια συνισταμένη
δύναμη και αλλά και την ίδια ροπή ως προς ένα τυχαίο σημείο. Από την άποψη αυτή, και με
αναφορά στο Δ.Ε.Σ. ενός γραμμικού στοιχείου, το ισοδύναμο σέτ των επικόμβιων φορτίων
του θα είναι αυτό με τα αντίθετα εντατικά μεγέθη του αντίστοιχου αμφίπακτου. Η υλοποίηση
της ιδέας αυτής φαίνεται στο παράδειγμα του σχήματος 21.
Σχ. 21. Aντικατάσταση ομοιόμορφου φορτίου δοκού με ισοδύναμα επικόμβια αμφίπακτης.
Στη δοκό m του σχήματος 21(α) φαίνεται το καθολικό ομοιόμορφο φορτίο q, τα επικόμβια
φορτία Pi και Pj και οι άγνωστες αντιδράσεις Ri και Rj. Βάσει της αρχής της επαλληλίας, η
πραγματική φορτιστική κατάσταση (α) μπορεί να θεωρηθεί ως άθροισμα των φορτιστικών
καταστάσεων (β) και (γ), όπου:
• στη φορτιστική κατάσταση (β) αντικαθίστανται οι πραγματικές συνθήκες στήριξης των ά-
κρων i και j με πλήρεις πακτώσεις. Κατά συνέπεια το φορτίο q μπορεί να αντικατασταθεί
από τις επικόμβιες αντιδράσεις της αμφίπακτης στο εξής δοκού για την κατάσταση αυτή.
• στη φορτιστική κατάσταση (γ), η οποία επαλληλίζεται με την (β), αίρονται οι πακτώσεις
της τελευταίας φορτίζοντας τους κόμβους με τα αντίθετα εντατικά μεγέθη του αμφίπακτου
μέλους αλλά θεωρώντας πλέον τις πραγματικές συνθήκες στήριξης. Στην κατάσταση αυτή
συνυπάρχουν και τα επικόμβια φορτία Pi και Pj και οι άγνωστες αντιδράσεις Ri και Rj.
Θεωρείται ότι η παραπάνω διάσπαση της κατάστασης (α) στις (β) και (γ) υλοποιείται για το
σύνολο των μελών της κατασκευής, αναφορικά με τις αλγεβρικές εκφράσεις που θα ακολου-
q
l
m j i
m j i
2
ql
2
ql 2
12
ql
2
12
ql
(α)
(β)
m j i
2
ql 2
ql
2
12
ql
2
12
ql
(γ)
FP
FP
FE=−PP
FE=−PP
Ri Rj
Pi Pj
Pi Pj
Ri Rj
45
θήσουν παρακάτω.
(Οι τιμές ql/2 και ql2/12 του παραδείγματος του σχήματος αφορούν την τέμνουσα δύναμη και
την καμπτική ροπή ως αντιδράσεις των άκρων αμφίπακτης δοκού φορτιζόμενης καθολικά με
σταθερό γραμμικό φορτίο q).
Στο σχήμα 21, ως PF ορίζονται οι επικόμβιες δυνάμεις-αντιδράσεις της αμφίπακτης δοκού
(δείκτης F = fixed-end = πακτωμένο άκρο) της κατάστασης (β), ενώ ως PE ορίζονται οι ισο-
δύναμες (δείκτης Ε = equivalent) επικόμβιες της κατάστασης (γ) που αίρουν τις πακτώσεις
της (β). Προφανώς ισχύει:
PE = -PF (63) Το άθροισμα των καταστάσεων (β) και (γ) είναι ισοδύναμο στατικά και κινηματικά με αυτό
της κατάστασης (α). Από αλγεβρικής πλευράς, το άθροισμα μπορεί να εκφρασθεί με τη
σχέση
F= ⋅ +P K U P (64) και ερμηνεύεται ως εξής:
το μητρώο P αρχικά (δηλ. όταν θα είναι U = 0) θα ισούται μόνο με τα εντατικά μεγέθη των
αντιδράσεων των αμφίπακτων μελών, PF (κατάσταση (β)). Δηλ. αγνοούνται τα επικόμβια
φορτία Pi και Pj και οι αντιδράσεις Ri και Rj ως μή ενεργούντα λόγω των πλήρων πακτώσεων.
Οι δυνάμεις PF των πακτώσεων αυτών μεταβιβάζονται απ’ ευθείας σε αυτές, οπότε δεν
τίθεται θέμα αντιδράσεων στα μέλη. Ετσι, οι δυνάμεις PF θεωρούνται πλασματικές υπό την
έννοια ότι εκφράζουν μή πραγματικές συνθήκες στήριξης των κόμβων (δηλ. τις επιβληθείσες
πακτώσεις). Στη συνέχεια, η σχέση (64), λαμβάνοντας υπ’ όψη και την (63), ξαναγράφεται
στη μορφή
F E− = + = ⋅P P P P K U (65) η οποία είναι η αλγεβρική έκφραση της κατάστασης (γ). Δηλαδή τώρα το μητρώο P
εκφράζεται ως το αλγεβρικό άθροισμα των πραγματικών επικόμβιων φορτίων Pi και Pj και
των αγνώστων αντιδράσεων Ri και Rj σύν τις ισοδύναμες επικόμβιες δυνάμεις PΕ (ίσες και
αντίθετες των PF) για το φορτίο q.
Εναλλακτικά, η ισχύς της σχέση (64) μπορεί να αποδειχθεί και ως ακολούθως.
• Επιλύεται η κατάσταση (γ) ως E+ = ⋅P P K U , όπου το μητρώο P εμπεριέχει τα επικόμβια
φορτία Pi και Pj και τις άγνωστες αντιδράσεις Ri και Rj.
46
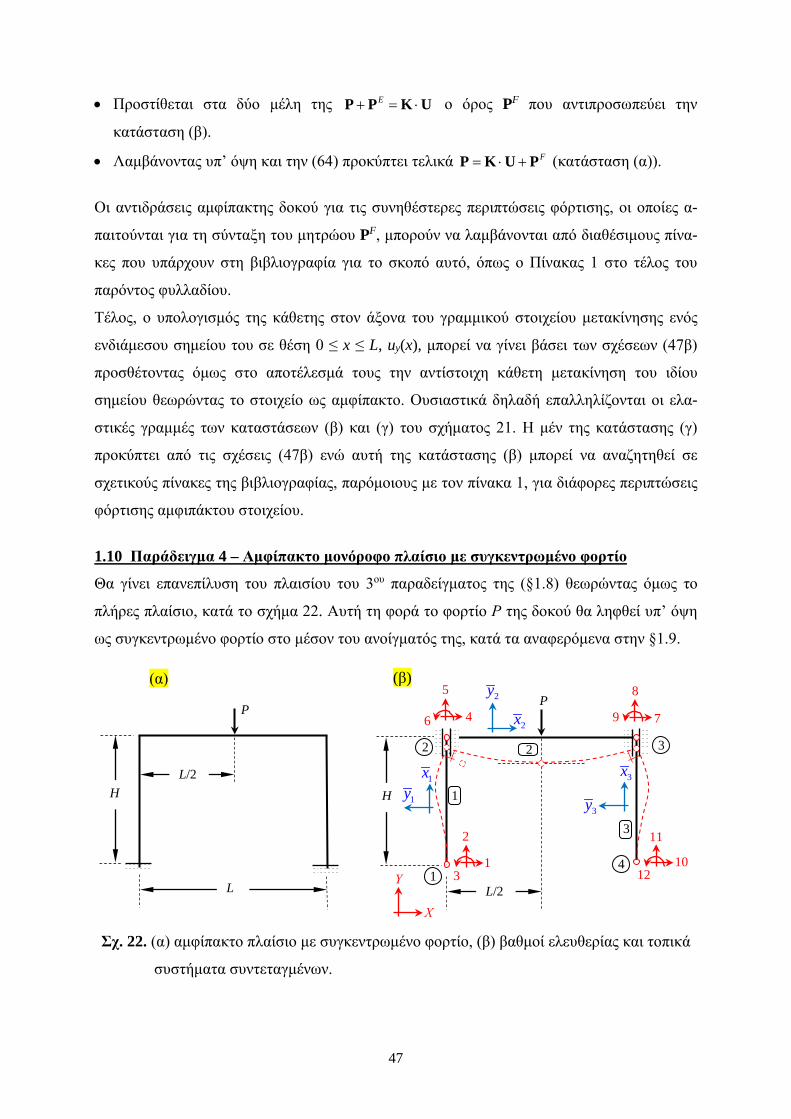
• Προστίθεται στα δύο μέλη της E+ = ⋅P P K U ο όρος PF που αντιπροσωπεύει την
κατάσταση (β).
• Λαμβάνοντας υπ’ όψη και την (64) προκύπτει τελικά F= ⋅ +P K U P (κατάσταση (α)).
Οι αντιδράσεις αμφίπακτης δοκού για τις συνηθέστερες περιπτώσεις φόρτισης, οι οποίες α-
παιτούνται για τη σύνταξη του μητρώου PF, μπορούν να λαμβάνονται από διαθέσιμους πίνα-
κες που υπάρχουν στη βιβλιογραφία για το σκοπό αυτό, όπως ο Πίνακας 1 στο τέλος του
παρόντος φυλλαδίου.
Τέλος, ο υπολογισμός της κάθετης στον άξονα του γραμμικού στοιχείου μετακίνησης ενός
ενδιάμεσου σημείου του σε θέση 0 ≤ x ≤ L, uy(x), μπορεί να γίνει βάσει των σχέσεων (47β)
προσθέτοντας όμως στο αποτέλεσμά τους την αντίστοιχη κάθετη μετακίνηση του ιδίου
σημείου θεωρώντας το στοιχείο ως αμφίπακτο. Ουσιαστικά δηλαδή επαλληλίζονται οι ελα-
στικές γραμμές των καταστάσεων (β) και (γ) του σχήματος 21. Η μέν της κατάστασης (γ)
προκύπτει από τις σχέσεις (47β) ενώ αυτή της κατάστασης (β) μπορεί να αναζητηθεί σε
σχετικούς πίνακες της βιβλιογραφίας, παρόμοιους με τον πίνακα 1, για διάφορες περιπτώσεις
φόρτισης αμφιπάκτου στοιχείου.
1.10 Παράδειγμα 4 – Αμφίπακτο μονόροφο πλαίσιο με συγκεντρωμένο φορτίο
Θα γίνει επανεπίλυση του πλαισίου του 3ου παραδείγματος της (§1.8) θεωρώντας όμως το
πλήρες πλαίσιο, κατά το σχήμα 22. Αυτή τη φορά το φορτίο Ρ της δοκού θα ληφθεί υπ’ όψη
ως συγκεντρωμένο φορτίο στο μέσον του ανοίγματός της, κατά τα αναφερόμενα στην §1.9.
Σχ. 22. (α) αμφίπακτο πλαίσιο με συγκεντρωμένο φορτίο, (β) βαθμοί ελευθερίας και τοπικά
συστήματα συντεταγμένων.
1
L/2
L
P
H
L/2
P
H
2
3
4
5
6 7
8
9
1
2
4
1
2
(α) (β)
Χ
Υ
1x
1y
2x
2y
3
3x
3y
3
10
11
12
47
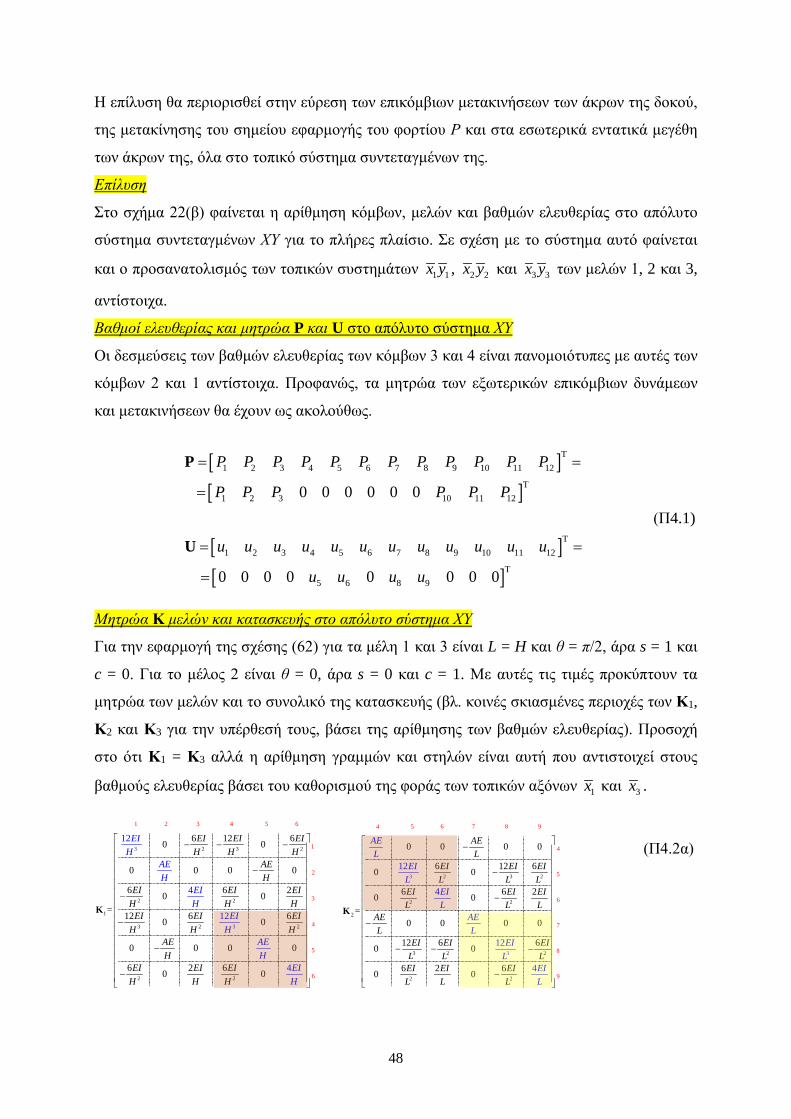
Η επίλυση θα περιορισθεί στην εύρεση των επικόμβιων μετακινήσεων των άκρων της δοκού,
της μετακίνησης του σημείου εφαρμογής του φορτίου Ρ και στα εσωτερικά εντατικά μεγέθη
των άκρων της, όλα στο τοπικό σύστημα συντεταγμένων της.
Επίλυση
Στο σχήμα 22(β) φαίνεται η αρίθμηση κόμβων, μελών και βαθμών ελευθερίας στο απόλυτο
σύστημα συντεταγμένων ΧΥ για το πλήρες πλαίσιο. Σε σχέση με το σύστημα αυτό φαίνεται
και ο προσανατολισμός των τοπικών συστημάτων 1 1x y , 2 2x y και 3 3x y των μελών 1, 2 και 3,
αντίστοιχα.
Βαθμοί ελευθερίας και μητρώα P και U στο απόλυτο σύστημα ΧΥ
Οι δεσμεύσεις των βαθμών ελευθερίας των κόμβων 3 και 4 είναι πανομοιότυπες με αυτές των
κόμβων 2 και 1 αντίστοιχα. Προφανώς, τα μητρώα των εξωτερικών επικόμβιων δυνάμεων
και μετακινήσεων θα έχουν ως ακολούθως.
[ ][ ]
[ ][ ]
T1 2 3 4 5 6 7 8 9 10 11 12
T1 2 3 10 11 12
T1 2 3 4 5 6 7 8 9 10 11 12
T5 6 8 9
0 0 0 0 0 0
0 0 0 0 0 0 0 0
P P P P P P P P P P P P
P P P P P P
u u u u u u u u u u u u
u u u u
= =
=
= =
=
P
U
(Π4.1)
Μητρώα Κ μελών και κατασκευής στο απόλυτο σύστημα ΧΥ
Για την εφαρμογή της σχέσης (62) για τα μέλη 1 και 3 είναι L = H και θ = π/2, άρα s = 1 και
c = 0. Για το μέλος 2 είναι θ = 0, άρα s = 0 και c = 1. Με αυτές τις τιμές προκύπτουν τα
μητρώα των μελών και το συνολικό της κατασκευής (βλ. κοινές σκιασμένες περιοχές των Κ1,
Κ2 και Κ3 για την υπέρθεσή τους, βάσει της αρίθμησης των βαθμών ελευθερίας). Προσοχή
στο ότι Κ1 = Κ3 αλλά η αρίθμηση γραμμών και στηλών είναι αυτή που αντιστοιχεί στους
βαθμούς ελευθερίας βάσει του καθορισμού της φοράς των τοπικών αξόνων 1x και 3x .
2 3 2
2 2
1
3 2
3
1 2 3 4 5 6
6 12 612 0 0
0 0 0 0
6 6 20 4 0= 12 0 16 2
EIH
AEH
E
EI EI EIH H H
AEH
EI EI EIH H H
EI EIH
I
EIH
H
− − −
−
−
−K
2
2 2
3
1
2
3
4
5
6
60
0 0 0 0
6 2 60
II
40
EIH
AEH
EI EI EIH
H
IHHE
H
AEH
− −
2 3 23
2 2
2
3
4 5 6 7 8 9
0 0 0 0
6 12 60 0
6 6 20 0=
0
1
0 0 0
120
2
4
AEL
EIL
EIL
AEL
EI EI EIL L L
EI EI EIL L L
AEL
EIL
AEL
−
−
−
−
− −
K
2
2
32
2
4
5
6
7
8
9
6 60
6 2 60
12
0 4
II
EI EIL L
EI EI EIL
EILL L
EIL
− −
(Π4.2α)
48
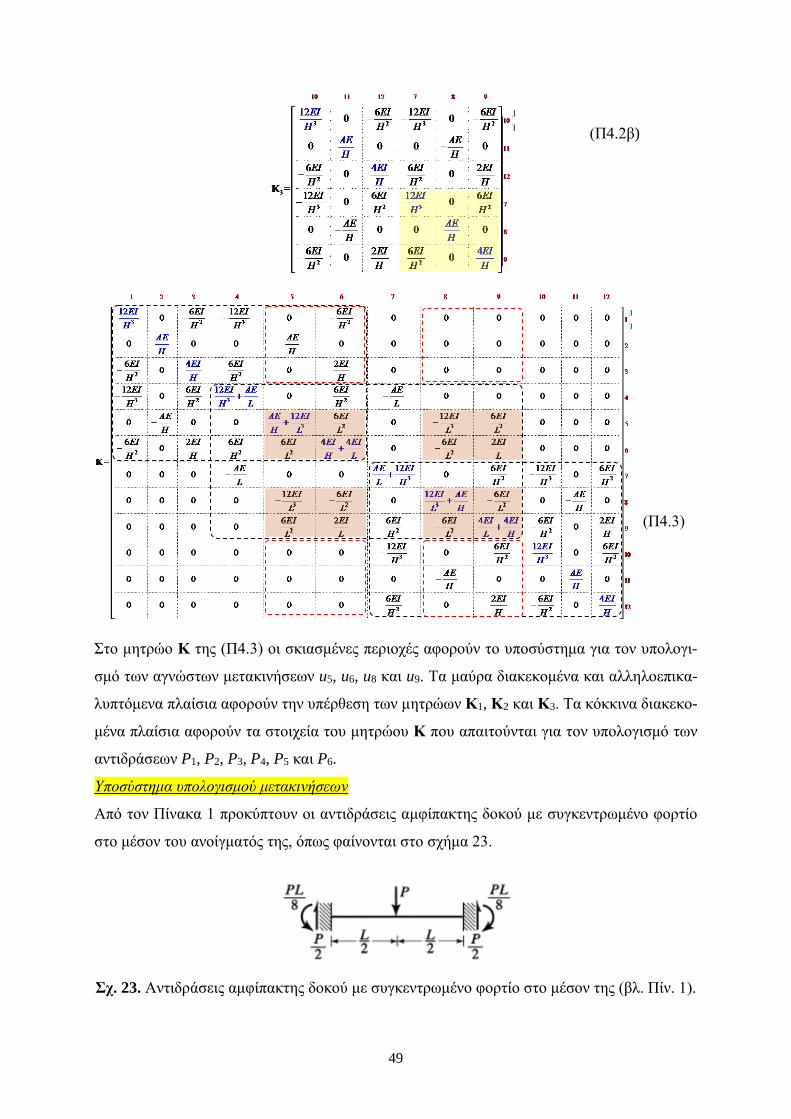
(Π4.2β)
(Π4.3)
Στο μητρώο Κ της (Π4.3) οι σκιασμένες περιοχές αφορούν το υποσύστημα για τον υπολογι-
σμό των αγνώστων μετακινήσεων u5, u6, u8 και u9. Τα μαύρα διακεκομένα και αλληλοεπικα-
λυπτόμενα πλαίσια αφορούν την υπέρθεση των μητρώων Κ1, Κ2 και Κ3. Τα κόκκινα διακεκο-
μένα πλαίσια αφορούν τα στοιχεία του μητρώου Κ που απαιτούνται για τον υπολογισμό των
αντιδράσεων P1, P2, P3, P4, P5 και P6.
Υποσύστημα υπολογισμού μετακινήσεων
Από τον Πίνακα 1 προκύπτουν οι αντιδράσεις αμφίπακτης δοκού με συγκεντρωμένο φορτίο
στο μέσον του ανοίγματός της, όπως φαίνονται στο σχήμα 23.
Σχ. 23. Αντιδράσεις αμφίπακτης δοκού με συγκεντρωμένο φορτίο στο μέσον της (βλ. Πίν. 1).
49
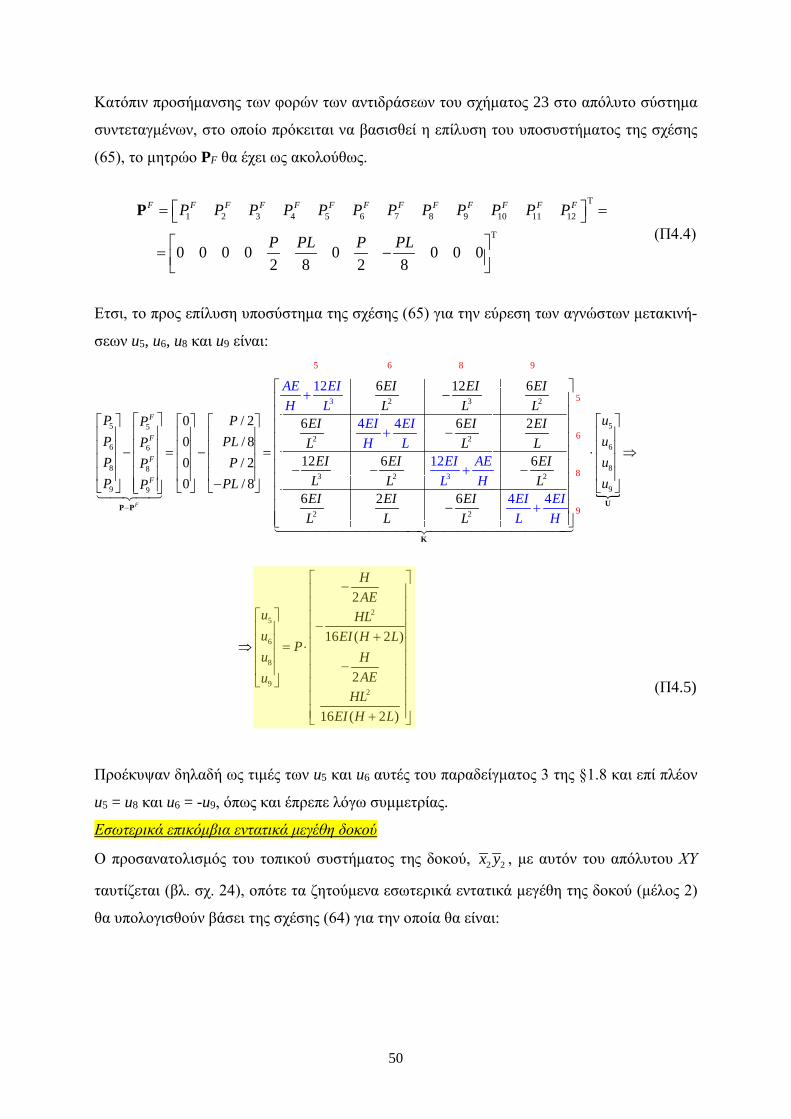
Κατόπιν προσήμανσης των φορών των αντιδράσεων του σχήματος 23 στο απόλυτο σύστημα
συντεταγμένων, στο οποίο πρόκειται να βασισθεί η επίλυση του υποσυστήματος της σχέσης
(65), το μητρώο PF θα έχει ως ακολούθως.
T
1 2 3 4 5 6 7 8 9 10 11 12
T
0 0 0 0 0 0 0 02 8 2 8
F F F F F F F F F F F F FP P P P P P P P P P P P
P PL P PL
= =
= −
P (Π4.4)
Ετσι, το προς επίλυση υποσύστημα της σχέσης (65) για την εύρεση των αγνώστων μετακινή-
σεων u5, u6, u8 και u9 είναι:
5
6
8
9
5 6 8 9
PPPP
2 3 2
2 2
3 2 2
5
6
8
3
3
9
2 2
6 12 6
6 6 2
12 6 6
6 2 6
0
12
4/ 20 / 80 / 20 /
4
12
4 48
F
F
F
F
F
EIAE EIH L
EI EIH L
EI AEL H
EI EIL
EI EIL L L
EI EI EIL L L
EI EI EIL L
PPPL
LEI EI
PPP
PLPEI
L L HL−
− = − = −
+
+
+
+
− − − − −
−
P P
5
6
8
9
25
6
8
92
5
6
8
9
2
16 ( 2 )
2
16 (
II
2 )
uuuu
HAE
u HLu EI H L
Pu H
AEuHL
EI H L
⇒
−
− +
⋅
⇒ = ⋅
−
+
U
K
(Π4.5)
Προέκυψαν δηλαδή ως τιμές των u5 και u6 αυτές του παραδείγματος 3 της §1.8 και επί πλέον
u5 = u8 και u6 = -u9, όπως και έπρεπε λόγω συμμετρίας.
Εσωτερικά επικόμβια εντατικά μεγέθη δοκού
Ο προσανατολισμός του τοπικού συστήματος της δοκού, 2 2x y , με αυτόν του απόλυτου ΧΥ
ταυτίζεται (βλ. σχ. 24), οπότε τα ζητούμενα εσωτερικά εντατικά μεγέθη της δοκού (μέλος 2)
θα υπολογισθούν βάσει της σχέσης (64) για την οποία θα είναι:
50
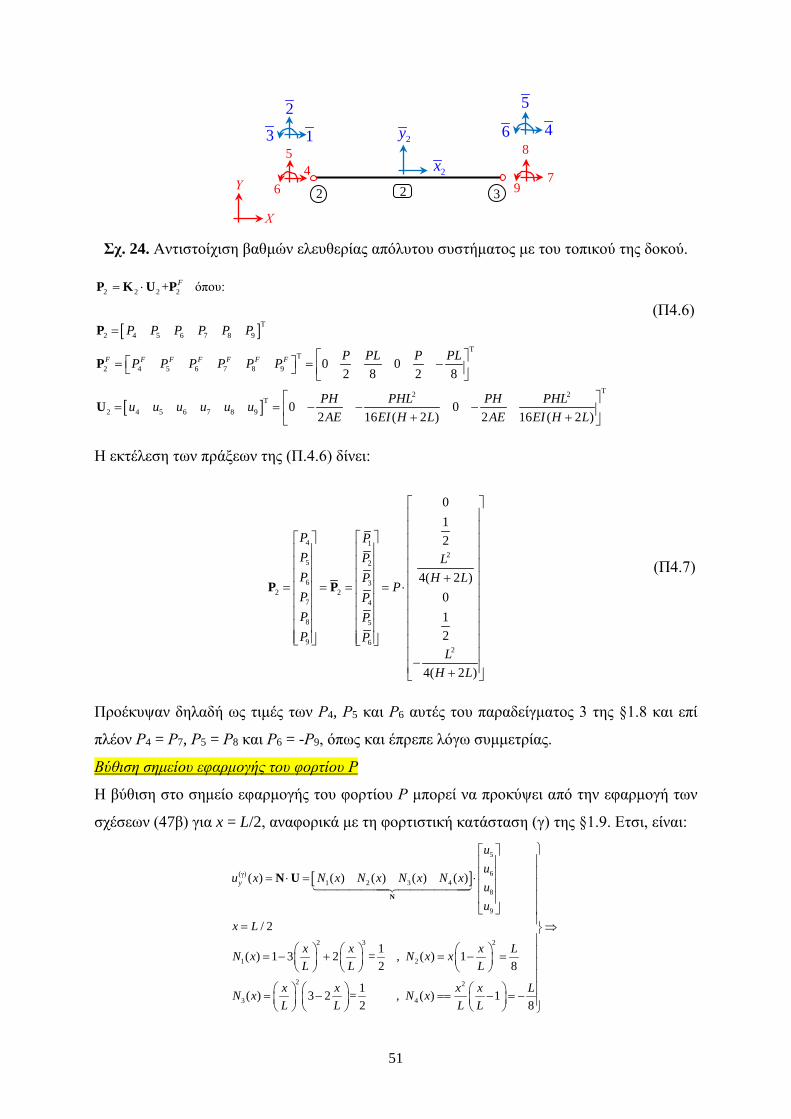
Σχ. 24. Αντιστοίχιση βαθμών ελευθερίας απόλυτου συστήματος με του τοπικού της δοκού.
[ ]
[ ]
2 2 2 2
T2 4 5 6 7 8 9
TT
2 4 5 6 7 8 9
TT
2 4 5
2 2
6 7 8 9
όπου:
2 16 ( 2 )
+
2 16
0 02 8 2
2
8
0)
0(
F
F F F F F F F
P P P P P P
P PL P PL
PH PHL PH PHLAE EI
P P P P P P
u u uH L AE
u uEI H L
u
= ⋅
=
=
− − −+
= −
+
= =
P K U P
P
P
U
(Π4.6)
Η εκτέλεση των πράξεων της (Π.4.6) δίνει:
2
2
4 1
5 2
6 32 2
7 4
8 5
9 6
12
4( 2 )012
4( 2 )
0
LH L
L
P PP PP P
PP P
H
P
L
P PP
= = = = ⋅
+
−+
P P (Π4.7)
Προέκυψαν δηλαδή ως τιμές των Ρ4, Ρ5 και Ρ6 αυτές του παραδείγματος 3 της §1.8 και επί
πλέον Ρ4 = Ρ7, Ρ5 = Ρ8 και Ρ6 = -Ρ9, όπως και έπρεπε λόγω συμμετρίας.
Βύθιση σημείου εφαρμογής του φορτίου Ρ
Η βύθιση στο σημείο εφαρμογής του φορτίου Ρ μπορεί να προκύψει από την εφαρμογή των
σχέσεων (47β) για x = L/2, αναφορικά με τη φορτιστική κατάσταση (γ) της §1.9. Ετσι, είναι:
[ ]
5
6(γ)1 2 3 4
8
9
2 3 2
1 2
2 2
3 4
( ) ( ) ( ) ( ) ( )
/ 2
1( ) 1 3 2 = , ( ) 12 8
1( ) 3 2 = , ( ) 12 8
y
uu
u x N x N x N x N xuu
x L
x x x LN x N x xL L L
x x x x LN x N xL L L L
= ⋅ = ⋅
=
= − + = − =
= − == − = −
N
N U
⇒
7
8
9 3 2
Χ
Υ 2x
2y
4 5
6 2
1
2
3 4
5
6
51
( )( )
γ)3
( 296 2
/ 2)2
(Ly
L H L HEI H L AE
u P
⇒ =
−+
+−
Στην παραπάνω έκφραση του (γ) ( / 2)yu L πρέπει να προστεθεί και η τιμή
(β) 3(L/ 2) / (192 )yu PL EI= − (κατάσταση (β)) που προκύπτει από την εξίσωση
(β) 2( ) 3 4 για 048 2yPL x Lu x x x
EI L = − − ≤ ≤
(Π.4.8)
και αφορά το μέγιστο βέλος κάμψης αμφίπακτης δοκού με συγκεντρωμένο φορτίο στο μέσον
της (για τη λύση αυτή βλ. π.χ. Beton Kalender ή άλλο σχετικό βοήθημα). Μετά την πρόσθεση
του όρου αυτού προκύπτει η τιμή της βύθισης u8 του παραδείγματος 3 της §1.8, όπως και
έπρεπε. Δηλαδή είναι:
( )( )
( )( )
3 3γ (β)
3
( ) 296 2 2
296 2 2
( / 2) ( ) ( )192
( / 2)
y y y
y
L H L HEI H L AE
L H L HEI H L
PLu L u x u x PEI
AL P
Eu
= + = + − ⇒
+−
−+
+− −
+
⇒ =
(Π.4.9)
1.11 Παράδειγμα 5 – Αμφίπακτο μή συμμετρικό πλαίσιο
Δίνεται το αμφίπακτο μή συμμετρικό πλαίσιο του σχήματος 25. Ολα τα μέλη του είναι σταθε-
ρής διατομής 20×45 cm και φορτίζονται με ομοιόμορφο φορτίο g (σε KN/m) που αφορά το
ίδιο βάρος τους. Λόγω της κλίσης των μελών ως πρός οριζόντιο άξονα οι κατανομές του g θα
είναι αυτές του όπως σχήματος. Επί πλέον, η οριζόντια δοκός φέρει συγκεντρωμένο φορτίο 5
ΚΝ σε απόσταση 3 m από το αριστερό άκρο της. Η κεκλιμένη δοκός φέρει επί πλέον του ι-
δίου βάρους της και το φορτίο της τριγωνικής κατανομής του σχήματος με μέγιστη τιμή 10
KN/m. Τέλος, το υποστύλωμα φέρει οριζόντιο ομοιόμορφο φορτίο 5 ΚΝ/m, επί πλέον του
ιδίου βάρους του, και ο κόμβος υποστυλώματος-κεκλιμένης δοκού φορτίζεται με οριζόντια
δύναμη 7.5 ΚΝ. Το υλικό του πλαισίου είναι σκυρόδεμα κατηγορίας C20/25 με μέτρο ελαστι-
κότητας E = 29 GPa και ειδικού βάρους γ = 25 ΚΝ/m3. Ζητείται η πλήρης στατική επίλυση
του πλαισίου.
Επίλυση
Στο σχήμα 26 φαίνεται το μαθηματικό μοντέλο του φορέα με τις αριθμήσεις κόμβων, μελών
και βαθμών ελευθερίας στο απόλυτο σύστημα ΧΥ.
52
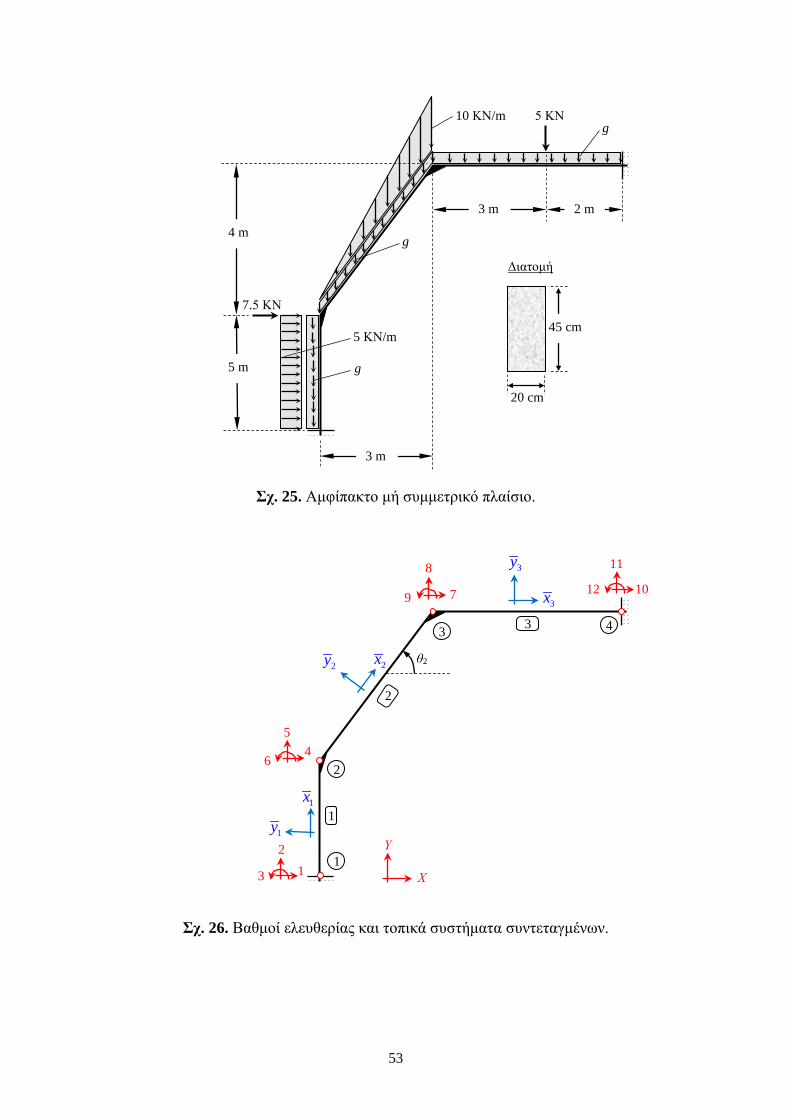
Σχ. 25. Αμφίπακτο μή συμμετρικό πλαίσιο.
Σχ. 26. Βαθμοί ελευθερίας και τοπικά συστήματα συντεταγμένων.
5 ΚΝ
5 m
3 m
3 m
4 m
g
2 m
7.5 ΚΝ
g
g
10 ΚΝ/m
5 ΚΝ/m 45 cm
20 cm
Διατομή
1
12
2
3
4 5
6
7
8
9 10
11
1
4
2
3
1
2
3
1x
3x
1y
3y
2x 2y
Υ
Χ
θ2
53
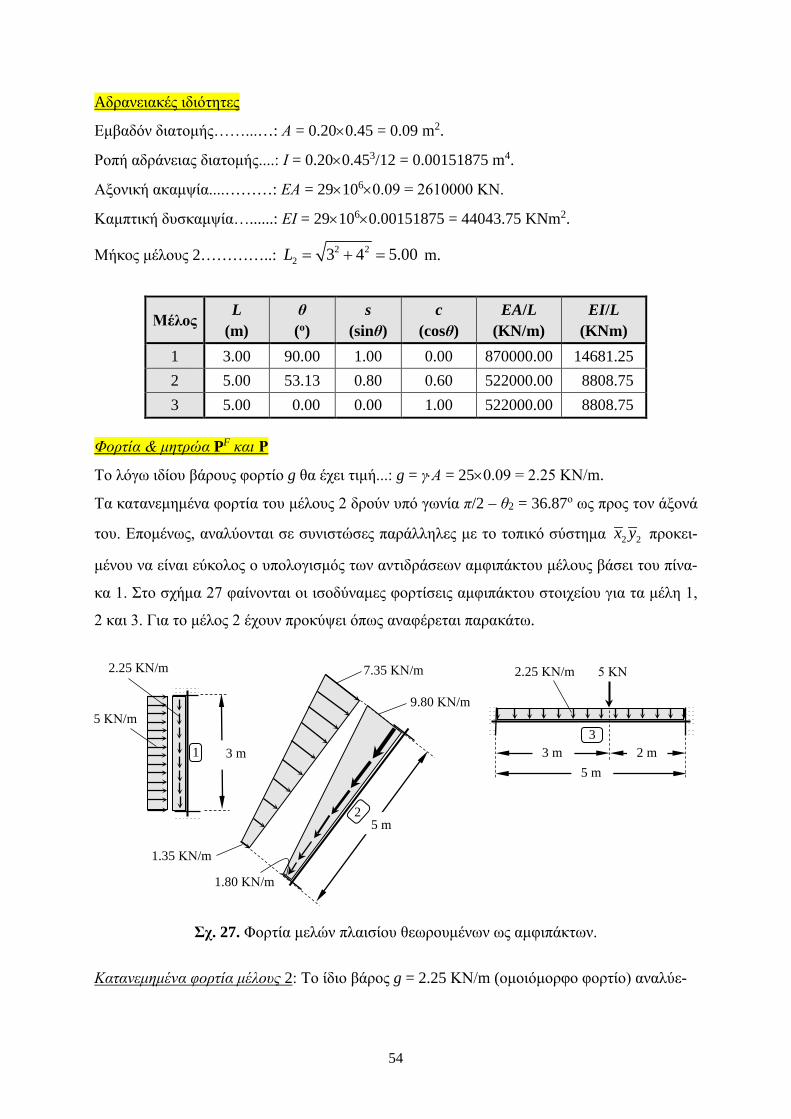
Aδρανειακές ιδιότητες
Εμβαδόν διατομής……...…: Α = 0.20×0.45 = 0.09 m2.
Ροπή αδράνειας διατομής....: Ι = 0.20×0.453/12 = 0.00151875 m4.
Αξονική ακαμψία....………: ΕΑ = 29×106×0.09 = 2610000 ΚΝ.
Καμπτική δυσκαμψία…......: ΕΙ = 29×106×0.00151875 = 44043.75 KNm2.
Μήκος μέλους 2…………..: 2 22 3 4 5.00L = + = m.
Μέλος L (m)
θ (ο)
s (sinθ)
c (cosθ)
EA/L (KN/m)
EI/L (KNm)
1 3.00 90.00 1.00 0.00 870000.00 14681.25 2 5.00 53.13 0.80 0.60 522000.00 8808.75 3 5.00 0.00 0.00 1.00 522000.00 8808.75
Φορτία & μητρώα PF και Ρ
Το λόγω ιδίου βάρους φορτίο g θα έχει τιμή...: g = γ⋅Α = 25×0.09 = 2.25 ΚΝ/m.
Τα κατανεμημένα φορτία του μέλους 2 δρούν υπό γωνία π/2 – θ2 = 36.87ο ως προς τον άξονά
του. Επομένως, αναλύονται σε συνιστώσες παράλληλες με το τοπικό σύστημα 2 2x y προκει-
μένου να είναι εύκολος ο υπολογισμός των αντιδράσεων αμφιπάκτου μέλους βάσει του πίνα-
κα 1. Στο σχήμα 27 φαίνονται οι ισοδύναμες φορτίσεις αμφιπάκτου στοιχείου για τα μέλη 1,
2 και 3. Για το μέλος 2 έχουν προκύψει όπως αναφέρεται παρακάτω.
Σχ. 27. Φορτία μελών πλαισίου θεωρουμένων ως αμφιπάκτων.
Κατανεμημένα φορτία μέλους 2: Το ίδιο βάρος g = 2.25 ΚΝ/m (ομοιόμορφο φορτίο) αναλύε-
5 ΚΝ
3 m 2 m
7.35 ΚΝ/m
3 m
5 ΚΝ/m
2.25 ΚΝ/m
1 3
2.25 ΚΝ/m
5 m
5 m 2
1.80 ΚΝ/m
9.80 ΚΝ/m
1.35 ΚΝ/m
54
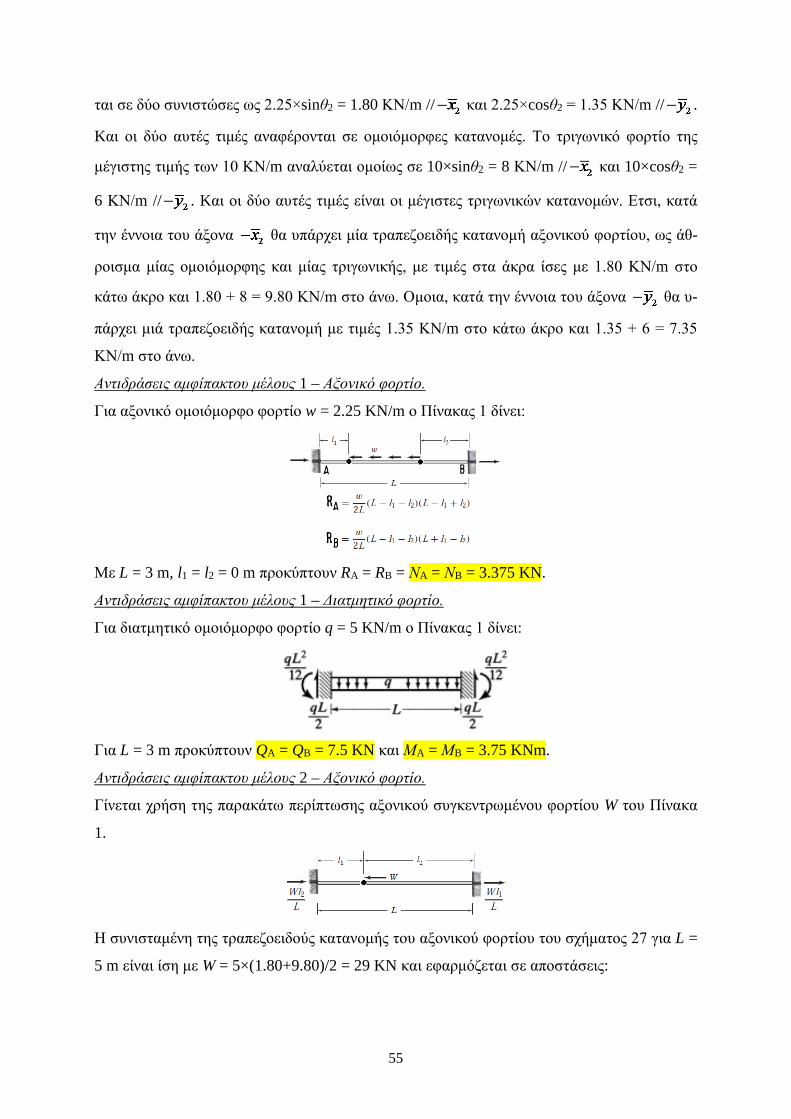
ται σε δύο συνιστώσες ως 2.25×sinθ2 = 1.80 ΚΝ/m // και 2.25×cosθ2 = 1.35 ΚΝ/m // .
Kαι οι δύο αυτές τιμές αναφέρονται σε ομοιόμορφες κατανομές. Το τριγωνικό φορτίο της
μέγιστης τιμής των 10 ΚΝ/m αναλύεται ομοίως σε 10×sinθ2 = 8 ΚΝ/m // και 10×cosθ2 =
6 ΚΝ/m // . Kαι οι δύο αυτές τιμές είναι οι μέγιστες τριγωνικών κατανομών. Ετσι, κατά
την έννοια του άξονα θα υπάρχει μία τραπεζοειδής κατανομή αξονικού φορτίου, ως άθ-
ροισμα μίας ομοιόμορφης και μίας τριγωνικής, με τιμές στα άκρα ίσες με 1.80 ΚΝ/m στο
κάτω άκρο και 1.80 + 8 = 9.80 KN/m στο άνω. Ομοια, κατά την έννοια του άξονα θα υ-
πάρχει μιά τραπεζοειδής κατανομή με τιμές 1.35 ΚΝ/m στο κάτω άκρο και 1.35 + 6 = 7.35
ΚΝ/m στο άνω.
Αντιδράσεις αμφίπακτου μέλους 1 – Αξονικό φορτίο.
Για αξονικό ομοιόμορφο φορτίο w = 2.25 KN/m ο Πίνακας 1 δίνει:
Με L = 3 m, l1 = l2 = 0 m προκύπτουν RA = RB = ΝA = ΝB = 3.375 KN.
Αντιδράσεις αμφίπακτου μέλους 1 – Διατμητικό φορτίο.
Για διατμητικό ομοιόμορφο φορτίο q = 5 KN/m ο Πίνακας 1 δίνει:
Για L = 3 m προκύπτουν QA = QB = 7.5 KN και ΜA = ΜB = 3.75 KNm.
Αντιδράσεις αμφίπακτου μέλους 2 – Αξονικό φορτίο.
Γίνεται χρήση της παρακάτω περίπτωσης αξονικού συγκεντρωμένου φορτίου W του Πίνακα
1.
Η συνισταμένη της τραπεζοειδούς κατανομής του αξονικού φορτίου του σχήματος 27 για L =
5 m είναι ίση με W = 5×(1.80+9.80)/2 = 29 KN και εφαρμόζεται σε αποστάσεις:
55
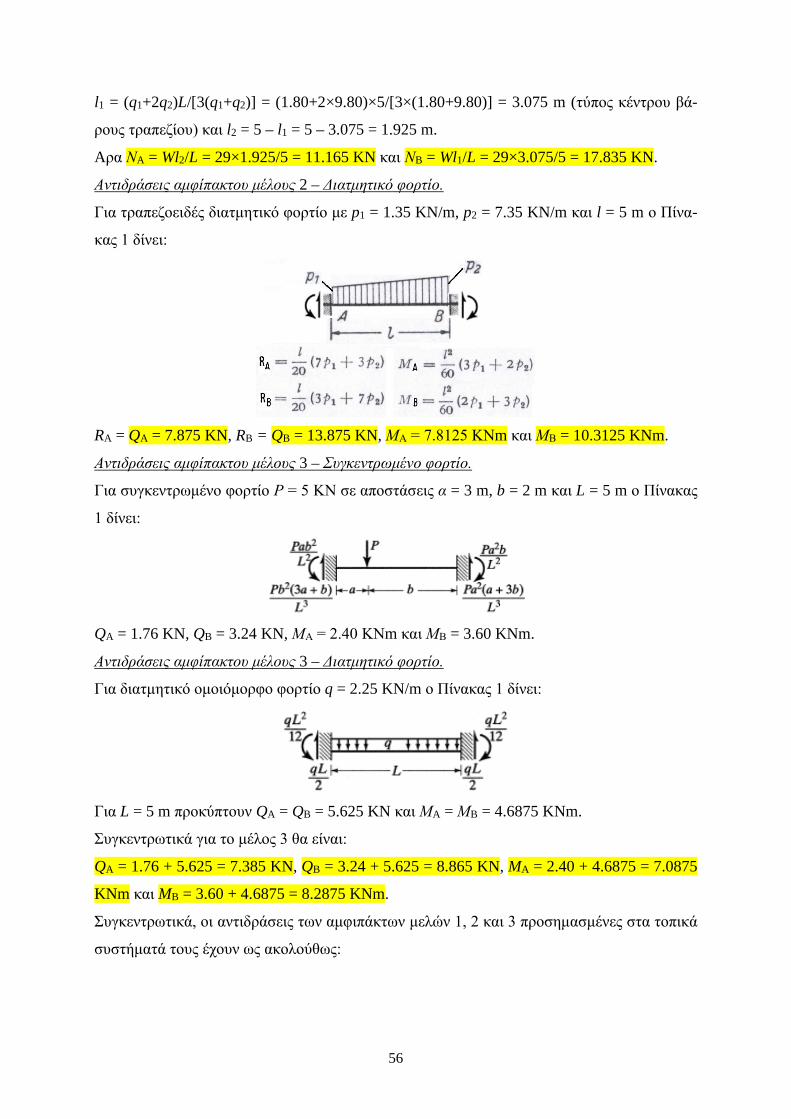
l1 = (q1+2q2)L/[3(q1+q2)] = (1.80+2×9.80)×5/[3×(1.80+9.80)] = 3.075 m (τύπος κέντρου βά-
ρους τραπεζίου) και l2 = 5 – l1 = 5 – 3.075 = 1.925 m.
Aρα ΝA = Wl2/L = 29×1.925/5 = 11.165 KN και ΝB = Wl1/L = 29×3.075/5 = 17.835 KN.
Αντιδράσεις αμφίπακτου μέλους 2 – Διατμητικό φορτίο.
Για τραπεζοειδές διατμητικό φορτίο με p1 = 1.35 KN/m, p2 = 7.35 KN/m και l = 5 m ο Πίνα-
κας 1 δίνει:
RA = QA = 7.875 KN, RB = QB = 13.875 KN, ΜΑ = 7.8125 ΚΝm και ΜΒ = 10.3125 KNm.
Αντιδράσεις αμφίπακτου μέλους 3 – Συγκεντρωμένο φορτίο.
Για συγκεντρωμένο φορτίο Ρ = 5 ΚΝ σε αποστάσεις α = 3 m, b = 2 m και L = 5 m ο Πίνακας
1 δίνει:
QA = 1.76 KN, QB = 3.24 KN, ΜΑ = 2.40 ΚΝm και ΜΒ = 3.60 KNm.
Αντιδράσεις αμφίπακτου μέλους 3 – Διατμητικό φορτίο.
Για διατμητικό ομοιόμορφο φορτίο q = 2.25 KN/m ο Πίνακας 1 δίνει:
Για L = 5 m προκύπτουν QA = QB = 5.625 KN και ΜA = ΜB = 4.6875 KNm.
Συγκεντρωτικά για το μέλος 3 θα είναι:
QA = 1.76 + 5.625 = 7.385 KN, QB = 3.24 + 5.625 = 8.865 KN, MA = 2.40 + 4.6875 = 7.0875
KNm και MB = 3.60 + 4.6875 = 8.2875 KNm.
Συγκεντρωτικά, οι αντιδράσεις των αμφιπάκτων μελών 1, 2 και 3 προσημασμένες στα τοπικά
συστήματά τους έχουν ως ακολούθως:
56
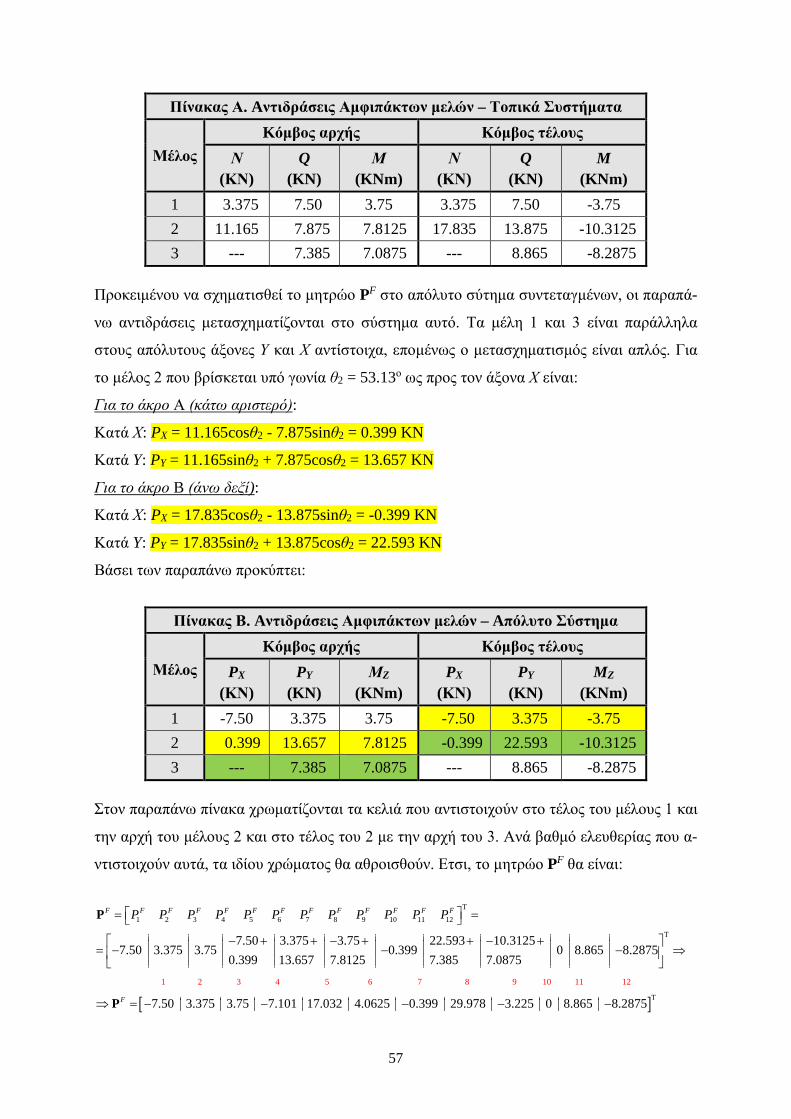
Πίνακας Α. Aντιδράσεις Αμφιπάκτων μελών – Τοπικά Συστήματα
Μέλος Kόμβος αρχής Κόμβος τέλους
Ν (ΚΝ)
Q (KN)
Μ (KNm)
Ν (ΚΝ)
Q (KN)
M (KNm)
1 3.375 7.50 3.75 3.375 7.50 -3.75 2 11.165 7.875 7.8125 17.835 13.875 -10.3125 3 --- 7.385 7.0875 --- 8.865 -8.2875
Προκειμένου να σχηματισθεί το μητρώο PF στο απόλυτο σύτημα συντεταγμένων, οι παραπά-
νω αντιδράσεις μετασχηματίζονται στο σύστημα αυτό. Τα μέλη 1 και 3 είναι παράλληλα
στους απόλυτους άξονες Υ και Χ αντίστοιχα, επομένως ο μετασχηματισμός είναι απλός. Για
το μέλος 2 που βρίσκεται υπό γωνία θ2 = 53.13ο ως προς τον άξονα Χ είναι:
Για το άκρο Α (κάτω αριστερό):
Κατά Χ: PX = 11.165cosθ2 - 7.875sinθ2 = 0.399 KN
Κατά Y: PY = 11.165sinθ2 + 7.875cosθ2 = 13.657 KN
Για το άκρο B (άνω δεξί):
Κατά Χ: PX = 17.835cosθ2 - 13.875sinθ2 = -0.399 KN
Κατά Y: PY = 17.835sinθ2 + 13.875cosθ2 = 22.593 KN
Βάσει των παραπάνω προκύπτει:
Πίνακας Β. Aντιδράσεις Αμφιπάκτων μελών – Aπόλυτο Σύστημα
Μέλος Kόμβος αρχής Κόμβος τέλους
PX (ΚΝ)
PY (KN)
ΜZ (KNm)
PX (ΚΝ)
PY (KN)
MZ (KNm)
1 -7.50 3.375 3.75 -7.50 3.375 -3.75 2 0.399 13.657 7.8125 -0.399 22.593 -10.3125 3 --- 7.385 7.0875 --- 8.865 -8.2875
Στον παραπάνω πίνακα χρωματίζονται τα κελιά που αντιστοιχούν στο τέλος του μέλους 1 και
την αρχή του μέλους 2 και στο τέλος του 2 με την αρχή του 3. Ανά βαθμό ελευθερίας που α-
ντιστοιχούν αυτά, τα ιδίου χρώματος θα αθροισθούν. Ετσι, το μητρώο PF θα είναι:
T
1 2 3 4 5 6 7 8 9 10 11 12
T
1 2
7.50 3.375 3.75 22.593 10.31257.50 3.375 3.75 0.399 0 8.865 8.2875
0.399 13.657 7.8125 7.385 7.0875
F F F F F F F F F F F F FP P P P P P P P P P P P = =
− + + − + + − + = − − − ⇒
P
3 4 5 6 7 8 9 10 11 12
7.50 3.375 3F⇒ = −P [ ]T.75 7.101 17.032 4.0625 0.399 29.978 3.225 0 8.865 8.2875− − − −
57
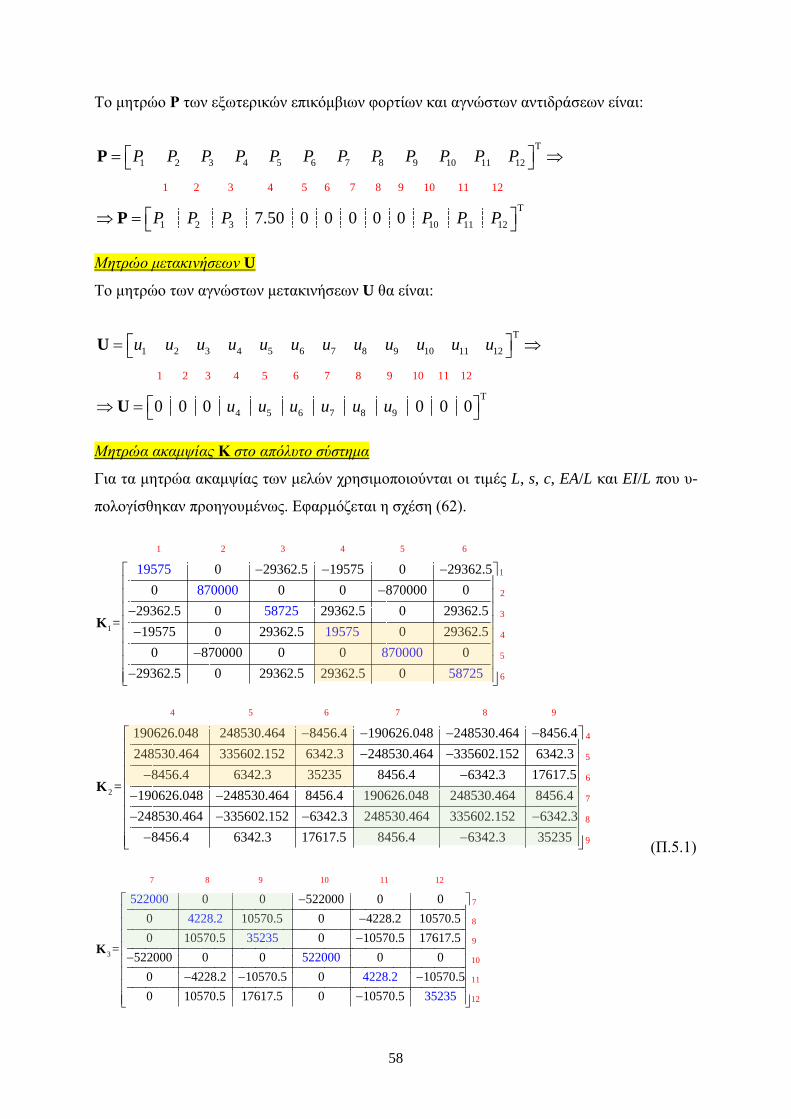
Το μητρώο Ρ των εξωτερικών επικόμβιων φορτίων και αγνώστων αντιδράσεων είναι:
T
1 2 3 4 5 6 7 8 9 10 11 12
T
1 2 3 10 11 12
1 2 3 4 5 6 7 8 9 10 11 12
7.50 0 0 0 0 0
P P P P P P P P P P P P
P P P P P P
= ⇒
⇒ =
P
P
Μητρώο μετακινήσεων U
Το μητρώο των αγνώστων μετακινήσεων U θα είναι:
T
1 2 3 4 5 6 7 8 9 10 11 12
T
4 5 6 7 8 9
1 2 3 4 5 6 7 8 9 10 11 12
0 0 0 0 0 0
u u u u u u u u u u u u
u u u u u u
= ⇒
⇒ =
U
U
Μητρώα ακαμψίας Κ στο απόλυτο σύστημα
Για τα μητρώα ακαμψίας των μελών χρησιμοποιούνται οι τιμές L, s, c, EA/L και EI/L που υ-
πολογίσθηκαν προηγουμένως. Εφαρμόζεται η σχέση (62).
1
1 2 3 4 5 6
0 29362.5 19575 0 29362.50 0 0 870
=
19575870000
− − −−
K
1
2
3
4
5
6
000 029362.5 0 29362.5 0 29362.519575 0 29362.5 0 29362.5
0 870000 0 0 029362.5 0 29362.5 29362
5872519575
870000587250
1
.5
− − − −
2
4 5 6 7 8 9
190
=K
626.048 248530.464 8456.4 190626.048 248530.464 8456.4248530.464 335602.152 6342.3 248530.464 335602.152 6342.3
8456.4 6342.3 35235 8456.4 6342.3 17617.5190626.048 248530.464 8456.4 190626.048 248530.464 8456.4
− − − −− −
− −− −−
4
5
6
7
8
9
248530.464 335602.152 6342.3 248530.464 335602.152 6342.38456.4 6342.3 17617.5 8456.4 6342.3 35235
1 − − −
− −
(Π.5.1)
3
7 8 9 10 11 12
5220004
0 0 522000 0 00 10570.5 0 42228. 28.22 1057
=
−−
K
7
8
9
10
11
12
35235522000
4228
0.50 10570.5 0 10570.5 17617.5
522000 0 0 0 00 4228.2 10570.5 0 10570.50 10570.5 17617.5 0 105
.2352350
1
7 .5
− − − − −
−
58
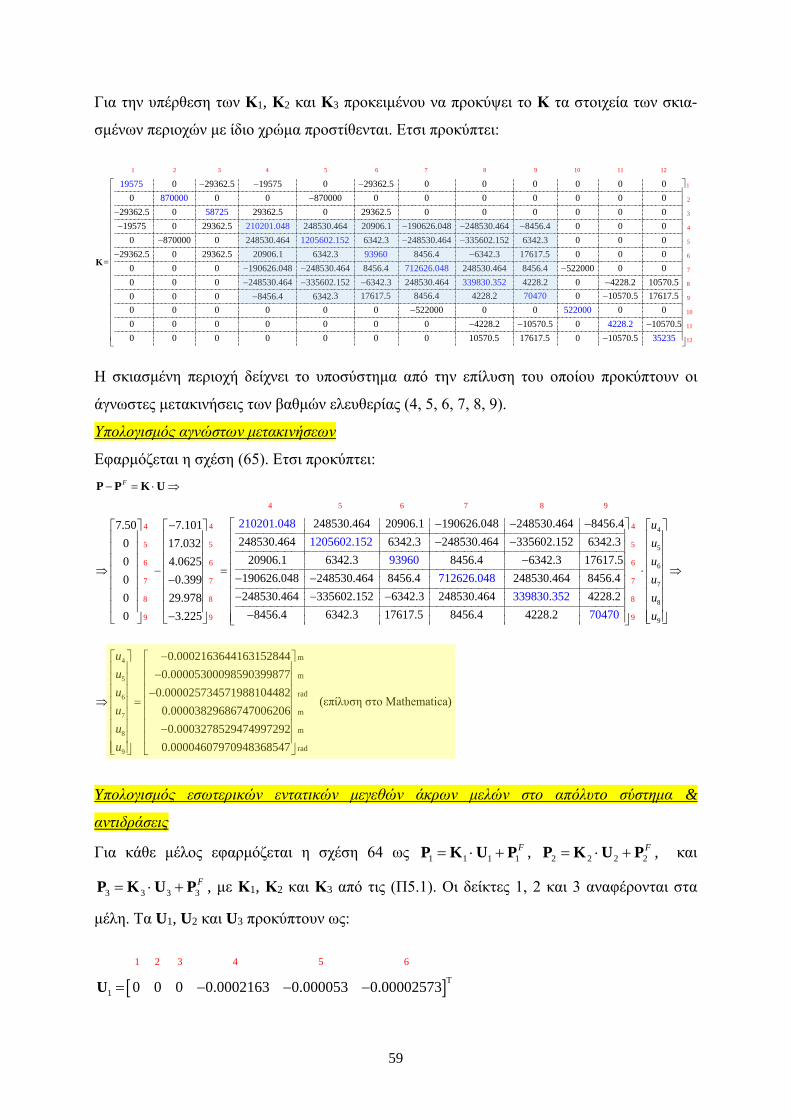
Για την υπέρθεση των Κ1, Κ2 και Κ3 προκειμένου να προκύψει το Κ τα στοιχεία των σκια-
σμένων περιοχών με ίδιο χρώμα προστίθενται. Ετσι προκύπτει:
1 2 3 4 5 6 7 8 9 10 11 12
0 29362.5 19575 0 29362.5 0 0 0 0 0195 0075
87000 00
=
− − −
K
0 870000 0 0 0 0 0 0 029362.5 0 29362.5 0 29362.5 0 0 0 0 0 019575 0 29362.5 248530.464 20906.1 190626.048 248530.464 8456.4 0 0 0
0 870000 0 248530.464 6342.3 248530.
58725210201.0
464 348
1205602. 35602.152 615 342.3 0 0 029362.
25 0 2
−−− − − −
− − −− 9362.5 20906.1 6342.3 8456.4 6342.3 17617.5 0 0 0
0 0 0 190626.048 248530.464 8456.4 248530.464 8456.4 522000 0 00 0 0 248530.464 335602.152 634
93960712626.048
3398302.3 248530.464 4228.2 0 4228.2 10570.50 0 0
.3528456.4 6342
−− − −− − − −−
1
2
3
4
5
6
7
8
9
10
11
12
.3 17617.5 8456.4 4228.2 0 10570.5 17617.50 0 0 0 0 0 522000 0 0 0 00 0 0 0 0 0 0 4228.2 10570.5 0 10570.50 0 0 0 0 0 0 10570.5 17617
70470522000
4228.23.5 0 1057 5230.5
1
5
− − − − − −
Η σκιασμένη περιοχή δείχνει το υποσύστημα από την επίλυση του οποίου προκύπτουν οι
άγνωστες μετακινήσεις των βαθμών ελευθερίας (4, 5, 6, 7, 8, 9).
Υπολογισμός αγνώστων μετακινήσεων
Εφαρμόζεται η σχέση (65). Ετσι προκύπτει:
4 5 6 7
F− = ⋅ ⇒P P K U 8 9
4 4
5 5
6 6
7 7
8 8
9 9
248530.464 20906.1 190626.048 24857.50 7.1010 17.03
21022
0 4.06250 0.3990 29.9780 3
01.041 1 8
.225
− −−
⇒ − = −
−
30.464 8456.4248530.464 6342.3 248530.464 335602.152 6342.3
20906.1 6342.3 8456.4 6342.3 171205602.152
93960712626.
617.5190626.048 248530.464 8456.4 248530.464 8456.4248530.464 335602.152 6342.3
048248530. 64 34
−− −
−− −− − −
4
5
6
7
8
9
4
5
6
7
8
9
4
5
6
7
8
9
0.0002163
4228.28456.4 6342.3 17617.5 8
39830.352704
6441631528440.00005300098590399877
0.00002
1
456.4 4 0. 7228 2
uuuuuu
uuuuuu
⋅ ⇒ −
⇒ =
−−−
m
m
rad
m
m
rad
57345719881044820.000038296867470062060.0003278529474997292
0.000046079709483685
(επίλυση στο Mathematica
1
)
47
−
Yπολογισμός εσωτερικών εντατικών μεγεθών άκρων μελών στο απόλυτο σύστημα &
αντιδράσεις
Για κάθε μέλος εφαρμόζεται η σχέση 64 ως 1 1 1 1F= ⋅ +P K U P , 2 2 2 2
F= ⋅ +P K U P , και
3 3 3 3F= ⋅ +P K U P , με Κ1, Κ2 και Κ3 από τις (Π5.1). Οι δείκτες 1, 2 και 3 αναφέρονται στα
μέλη. Τα U1, U2 και U3 προκύπτουν ως:
[ ]T1
1 2 3 4 5 6
0 0 0 0.0002163 0.000053 0.00002573= − − −U
59

2
4 5 6 7 8 9
= −U [ ]T0.0002163 0.000053 0.00002573 0.00003829 0.0003278 0.00004607− − −
[ ]T3
7 8 9 10 11 12
0.00003829 0.0003278 0.00004607 0 0 0= −U
Προφανώς, για τα 1
FP , 2FP και 3
FP κάθε μέλους χρησιμοποιούνται οι τιμές που αφορούν τα
ενδιάμεσα των άκρων φορτία του υπ’ όψη μέλους και μόνο. Ετσι προκύπτουν (βλ. πίνακα Β):
[ ]T1
1 2 3 4 5 6
7.50 3.375 3.75 7.50 3.375 3.75F = − − −P
[ ]T2
4 5 6 7 8 9
0.399 13.657 7.8125 0.399 22.593 10.3125F = − −P
[ ]T3
7 8 9 10 11 12
0 7.385 7.0875 0 8.865 8.2875F = −P
Η εκτέλεση των πράξεων (Μathematica) δίνει:
1
2
31
4
5
6
KN
KN
KNm
KN
KN
KNm
2.5090351806275949.485857736478933.35863154405825612.4909648193724142.7358577364789311.614262914058973
1PPPPPP
−
−−
= = −
−
P ,
4
5
62
7
8
9
KN
KN
KNm
KN
KN
KNm
19.99096481937234842.73585773647888
11.61426291405897319.9909648193723486.4858577364788775.245548982111769
1PPPPPP
= =
−−
−
P
(Π5.2)
7
8
93
10
11
12
KN
KN
KNm
KN
KN
KNm
19.9909648193723946.4858577364789425.24554898211177119.9909648193723949.7641422635
1
2105710.941260299717058
PPPPPP
−
−
= =
P
Τα τρία πρώτα εντατικά μεγέθη του μητρώου Ρ1 και τα τρία τελευταία του Ρ3 είναι οι
αντιδράσεις του πλαισίου στις στηρίξεις του.
Ελεγχος ισορροπίας κόμβων
Από τις (Π5.2) εύκολα προκύπτει ότι ανά βαθμό ελευθερίας το αλγεβρικό άθροισμα των εσω-
τερικών εντατικών μεγεθών των μελών που συμβάλουν στον κόμβο 2 είναι ίσο με τα εξωτε-
ρικά φορτία του κόμβου αυτού. Ενδεικτικά, για τον βαθμό ελευθερίας 4 είναι:
60
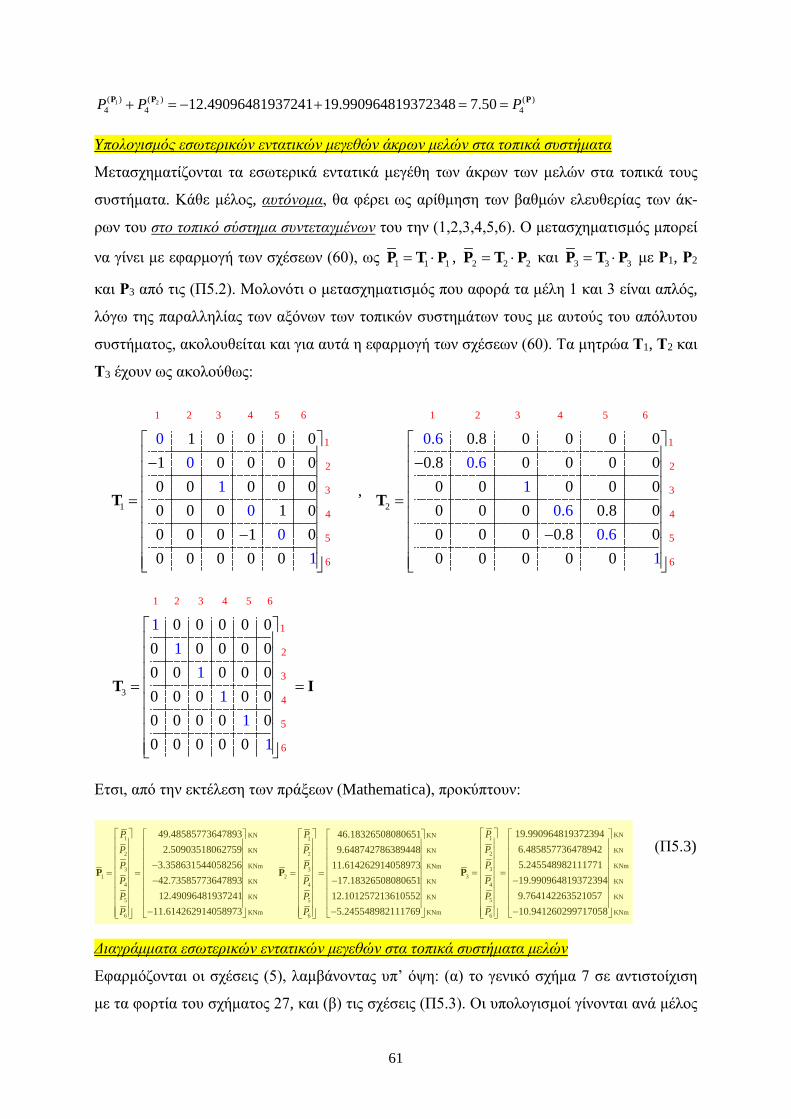
1 2( ) ( ) ( )4 4 412.49096481937241 19.990964819372348 7.50P P P− + = =+ =P P P
Yπολογισμός εσωτερικών εντατικών μεγεθών άκρων μελών στα τοπικά συστήματα
Μετασχηματίζονται τα εσωτερικά εντατικά μεγέθη των άκρων των μελών στα τοπικά τους
συστήματα. Κάθε μέλος, αυτόνομα, θα φέρει ως αρίθμηση των βαθμών ελευθερίας των άκ-
ρων του στο τοπικό σύστημα συντεταγμένων του την (1,2,3,4,5,6). Ο μετασχηματισμός μπορεί
να γίνει με εφαρμογή των σχέσεων (60), ως 1 1 1= ⋅P T P , 2 2 2= ⋅P T P και 3 3 3= ⋅P T P με Ρ1, Ρ2
και Ρ3 από τις (Π5.2). Μολονότι ο μετασχηματισμός που αφορά τα μέλη 1 και 3 είναι απλός,
λόγω της παραλληλίας των αξόνων των τοπικών συστημάτων τους με αυτούς του απόλυτου
συστήματος, ακολουθείται και για αυτά η εφαρμογή των σχέσεων (60). Τα μητρώα Τ1, Τ2 και
Τ3 έχουν ως ακολούθως:
1
1 2 3 4 5 6
1
2
3
4
5
6
00
10
1 0 0 0 01 0 0 0 00 0 0 0 0
0 0 0 1 00 0 0 1 0
10 0 0 0 0
1
0
−
= −
T , 2
1 2 3 4 5 6
1
2
3
4
5
6
0.8 0 0 0 00.8 0 0 0 0
0 0 0 0 00 0 0 0.8 00
0.60.6
10.6
0.0 0 0.8 00 0 0 0 1
1
06
−
= −
T
3
1 2 3 4 5 6
1
2
3
4
5
6
0 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
10
11
11
1
1
= =
T I
Ετσι, από την εκτέλεση των πράξεων (Mathematica), προκύπτουν:
1
2
31
4
5
6
KN
KN
KNm
KN
KN
KNm
49.485857736478932.50903518062759
3.35863154405825642.7358577364789312.49096481937241
11.614262914
1
058973
PPPPPP
−−
= =
−
P
1
2
32
4
5
6
KN
KN
KNm
KN
KN
KNm
46.183265080806519.648742786389448
11.61426291405897317.18326508080651
12.1012572136105525.245548982111769
1PPPPPP
−
−
= =
P
1
2
33
4
5
6
KN
KN
KNm
KN
KN
KNm
19.9909648193723946.4858577364789425.24554898211177119.9909648193723949.76414226352105710.941260299717058
1PPPPPP
−
= =
−
P
(Π5.3)
Διαγράμματα εσωτερικών εντατικών μεγεθών στα τοπικά συστήματα μελών
Εφαρμόζονται οι σχέσεις (5), λαμβάνοντας υπ’ όψη: (α) το γενικό σχήμα 7 σε αντιστοίχιση
με τα φορτία του σχήματος 27, και (β) τις σχέσεις (Π5.3). Οι υπολογισμοί γίνονται ανά μέλος
61

και στα επόμενα θα θεωρείται ότι 1 2 3 ή ή x x x x= . Για την εφαρμογή των σχέσεων (5) απαι-
τείται η έκφραση της εξίσωσης των κατανεμημένων φορτίων στη μορφή q(x). Για το σκοπό
αυτό διακρίνονται οι ακόλουθες δύο περιπτώσεις φόρτισης με κατανεμημένα φορτία του φο-
ρέα που επιλύθηκε.
2 1
1
=σταθ. για ομοιόμορφη κατανομή( ) , [0, ]
για τραπεζοειδή κατανομή
qq x x Lq qq x
L
= ∈ −
+
Στις σχέσεις εμφανίζονται ολοκληρώματα των μορφών:
,2
,1
( )k
k
x a
aq x dx
≤
∫ και ,2
,1
( )k
k
x a
aq x xdx
≤
∫
Τα κατανεμημένα φορτία του πλαισίου είναι καθολικά στο μήκος των μελών του, οπότε
αk,1 = 0 και αk,2 = L. Κατόπιν αυτών, οι τιμές των παραπάνω ολοκληρωμάτων θα είναι:
22 101
για ομοιόμορφη κατανομή( ) , [0, ]
για τραπεζοειδή κατανομή2
x Lq x
q x dx x Lq qq x xL
≤⋅
= ∈ −⋅ +
∫
2
02 31 2 1
για ομοιόμορφη κατανομή2( ) , [0, ]
για τραπεζοειδή κατανομή2 3
x L
q xq x xdx x L
q q qx xL
≤
= ∈ − +
∫
Επομένως ο όρος 0 0
( ) ( )x L x L
x q x dx q x xdx≤ ≤
⋅ −∫ ∫ των (5) για την M(x) γίνεται:
2
0 02 31 2 1
για ομοιόμορφη κατανομή2( ) ( ) , [0, ]
για τραπεζοειδή κατανομή2 6
x L x L
q xx q x dx q x xdx x L
q q qx xL
≤ ≤
⋅ − = ∈ − +
∫ ∫
Μέλος 1
qΝ(x) = qΝ = -2.25 = σταθ. και qQ(x) = qQ = -5 = σταθ., άρα:
1
2
23 2
( ) ( ) 49.485 2.25 (KN) [0,3]
( ) ( ) 2.509 5 (KN) [0,3]
( ) ( ) 3.358 2.509 2.502
N
Q
Q
N x P q x N x x xQ x P q x Q x x x
qM x P P x x M x x
= − − ⋅ ⇒ = − + ∈
= − − ⋅ ⇒ = − + ∈
= − + ⋅ + ⇒ = + − 2 (KNm) [0,3]x x∈
62
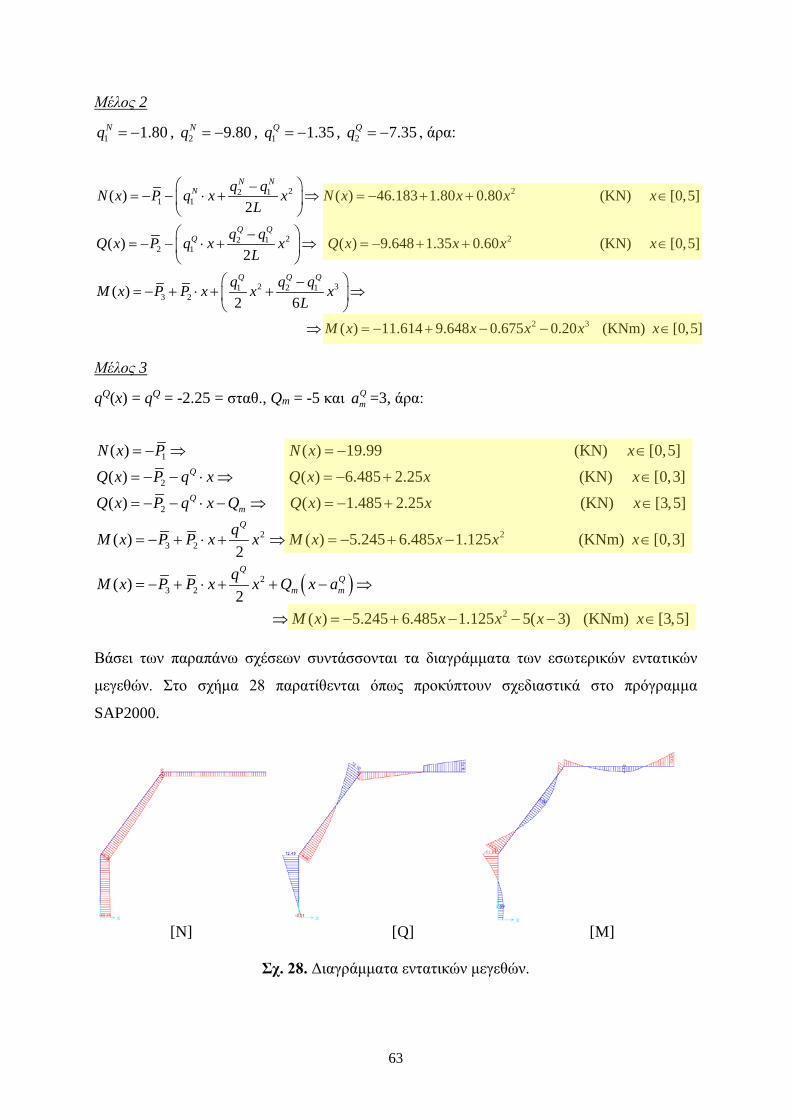
Μέλος 2
1 1.80Nq = − , 2 9.80Nq = − , 1 1.35Qq = − , 2 7.35Qq = − , άρα:
2 22 1
1 1
2 22 12 1
( ) ( ) 46.183 1.80 0.80 (KN) [0,5]2
( ) ( ) 9.648 1.35 0.60 (KN) [0,5]2
( )
N NN
Q QQ
q qN x P q x x N x x x xL
q qQ x P q x x Q x x x xL
M x
−= − − ⋅ + ⇒ = − + + ∈
−
= − − ⋅ + ⇒ = − + + ∈
= − 2 31 2 13 2
2 3
2 6
( ) 11.614 9.648 0.675 0.20 (KNm) [0,5]
Q Q Qq q qP P x x xL
M x x x x x
−+ ⋅ + + ⇒
⇒ = − + − − ∈
Μέλος 3
qQ(x) = qQ = -2.25 = σταθ., Qm = -5 και Qma =3, άρα:
1
2
( ) ( ) 19.99 (KN) [0,5]
( ) ( ) 6.485 2.25 (KN) Q
N x P N x xQ x P q x Q x x x
= − ⇒ = − ∈
= − − ⋅ ⇒ = − +
2
2 23 2
23 2
[0,3]
( ) ( ) 1.485 2.25 (KN) [3,5]
( ) ( ) 5.245 6.485 1.125 (KNm) [0,3]2
( )2
QmQ
Q
m
Q x P q x Q Q x x xqM x P P x x M x x x x
qM x P P x x Q x
∈
= − − ⋅ − ⇒ = − + ∈
= − + ⋅ + ⇒ = − + − ∈
= − + ⋅ + + −( )2 ( ) 5.245 6.485 1.125 5( 3) (KNm) [3,5]
Qma
M x x x x x
⇒
⇒ = − + − − − ∈
Βάσει των παραπάνω σχέσεων συντάσσονται τα διαγράμματα των εσωτερικών εντατικών
μεγεθών. Στο σχήμα 28 παρατίθενται όπως προκύπτουν σχεδιαστικά στο πρόγραμμα
SAP2000.
[N] [Q] [M]
Σχ. 28. Διαγράμματα εντατικών μεγεθών.
63
1.12 Γενίκευση αλγορίθμου Μεθόδου Αμεσης Δυσκαμψίας
Παρατίθενται συνοπτικά τα βήματα της εφαρμογής της μεθόδου άμεσης δυσκαμψίας μετά
σχετικής γενίκευσης που αφορά τα φορτία επί των μελών.
1. Διακριτοποίηση της κατασκευής σε γραμμικά στοιχεία βάσει των πραγματικών κόμβων
συμβολής τους.
2. Διάσπαση επιλεγμένων μελών σε αριθμό περισσότερων στοιχείων κατόπιν εισαγωγής
πρόσθετου/των ενδιάμεσων κόμβων, εάν απαιτείται για κάποιο λόγο (π.χ. να ζητούνται οι
μετακινήσεις ενδιαμέσου σημείου ενός μέλους που φέρει κατανεμημένο φορτίο, κ.λ.π.).
3. Αρίθμηση των μελών της κατασκευής.
4. Αρίθμηση των κόμβων της κατασκευής.
5. Αρίθμηση των βαθμών ελευθερίας των κόμβων της κατασκευής.
6. Σύνταξη των μητρώων ακαμψίας των μελών της κατασκευής στο τοπικό σύστημα συντε-
ταγμένων κάθε μέλους. Χρησιμοποιείται ξεχωριστή αρίθμηση των βαθμών ελευθερίας.
Εδώ καθορίζεται η φορά του θετικού ημιάξονα x και η τιμή της γωνίας θ (προσανατο-
λισμός του τοπικού συστήματος του μέλους ως πρός το απόλυτο). Ενδεχομένως (ανα-
λόγως του είδους του προβλήματος και των ζητουμένων), στο βήμα αυτό να παραλείπε-
ται η σύνταξη του μητρώου στο τοπικό σύστημα και να υλοποιούνται τα λοιπά αναφερό-
μενα που απαιτούνται στο επόμενο βήμα.
7. Σύνταξη των μητρώων ακαμψίας των μελών της κατασκευής στο απόλυτο σύστημα
συντεταγμένων. Η αρίθμηση στηλών και γραμμών να βασίζεται στην αρίθμηση των βαθ-
μών ελευθερίας στο απόλυτο σύστημα. Ετσι, προκύπτουν άμεσα οι συντεταγμένες γραμ-
μής και στήλης που θα κατέχει το κάθε στοιχείο kij του μητρώου ακαμψίας κάθε μέλους
σε αυτό της κατασκευής.
8. Σχηματίζεται το μητρώο Κ της κατασκευής κατόπιν κατάλληλης υπέρθεσης των μητρώ-
ων Κ των μελών του βήματος 7.
9. Σχηματίζεται στο απόλυτο σύστημα το μητρώο P με τα πραγματικά εξωτερικά επικόμβια
φορτία και τις άγνωστες αντιδράσεις, ανά βαθμό ελευθερίας κατά τα γνωστά.
10. Σχηματίζεται στο απόλυτο σύστημα το μητρώο PF ανά βαθμό ελευθερίας. Για ένα συγκε-
κριμένο βαθμό ελευθερίας αθροίζονται οι αντιδράσεις των άκρων των μελών που σχετί-
ζονται με τον υπ’ όψη, θεωρώντας τα μέλη ως αμφίπακτα. Λαμβάνονται υπ΄ όψη μόνο τα
μέλη που φέρουν συγκεντρωμένα ή κατανεμημένα φορτία μεταξύ των άκρων τους.
11. Σχηματίζεται στο απόλυτο σύστημα το μητρώο U με τις άγνωστες μετακινήσεις των
ενεργών βαθμών ελευθερίας των κόμβων, τις γνωστές-μηδενικές τιμές για τους πακτω-
64
μένους βαθμούς ελευθερίας τους και τις γνωστές μή μηδενικές τιμές για αυτούς που
υπόκεινται σε εξαναγκασμένη βύθιση ή στροφή.
12. Επιλύεται ως προς τις άγνωστες μετακινήσεις το σύστημα F− = ⋅P P K U . Εν γένει, η εν
λόγω επίλυση γίνεται κατόπιν διαμερισμού (partitioning) των μητρώων κατά το σχήμα
του ακολουθεί.
( )1
Fff fsf fF f
Fsf sss ss
Ff ff f f fs s
−
− = − = ⋅ ⇒
⇒ = ⋅ − − ⋅
K KP UPP P
K KP UP
U K P P K U
(66)
Στη σχέση (66) ο δείκτης f (free) δηλώνει τους ελεύθερους-ενεργούς βαθμούς ελευθε-
ρίας και ο s τους δεσμευμένους-πακτωμένους (supported) με μηδενικές τιμές και τους υ-
ποκείμενους σε εξαναγκασμένη μετακίνηση ή στροφή, άρα με γνωστές μή μηδενικές τι-
μές. Εάν ο Us είναι μηδενικός υποπίνακας, τότε το γινόμενο Kfs⋅Us μπορεί να παραλείπε-
ται. Εάν τα μέλη δεν φέρουν φορτία ενδιάμεσα των κόμβων τους τότε το υπομητρώο FfP
μπορεί επίσης να παραλείπεται ως μηδενικό. Υπενθυμίζεται ότι:
Για το προς επίλυση υποσύστημα της (66) λαμβάνονται υπ’ όψη:
(α) για το μητρώο Kff τα στοιχεία γραμμών και στηλών του Κ που φέρουν τους αριθμούς
των βαθμών ελευθερίας των προς υπολογισμό μετακινήσεων, δηλ. των ενεργών.
(β) για τα μητρώα Pf και FfP τα στοιχεία των γραμμών όπως αυτές ορίζονται για το μη-
τρώο Kff.
(γ) για το μητρώο Kfs τα στοιχεία των γραμμών όπως αυτές ορίζονται για το μητρώο Kff,
και των στηλών του Κ που φέρουν τους αριθμούς των βαθμών ελευθερίας με
γνωστές τιμές, δηλ. των πακτωμένων και αυτών που υπόκεινται σε τυχόν εξαναγκα-
σμένη μετακίνηση ή στροφή.
(δ) για το μητρώο Us τα στοιχεία των γραμμών που φέρουν τους αριθμούς των βαθμών
ελευθερίας με γνωστές τιμές, δηλ. των πακτωμένων και αυτών που υπόκεινται σε
τυχόν εξαναγκασμένη μετακίνηση ή στροφή.
(ε) για το μητρώο Uf τα στοιχεία των γραμμών που φέρουν τους αριθμούς των βαθμών
ελευθερίας των προς υπολογισμό μετακινήσεων, δηλ. των ενεργών.
13. Υπολογίζονται οι άγνωστες αντιδράσεις από την ακόλουθη σχέση που προκύπτει από την
πρώτη των (66).
65
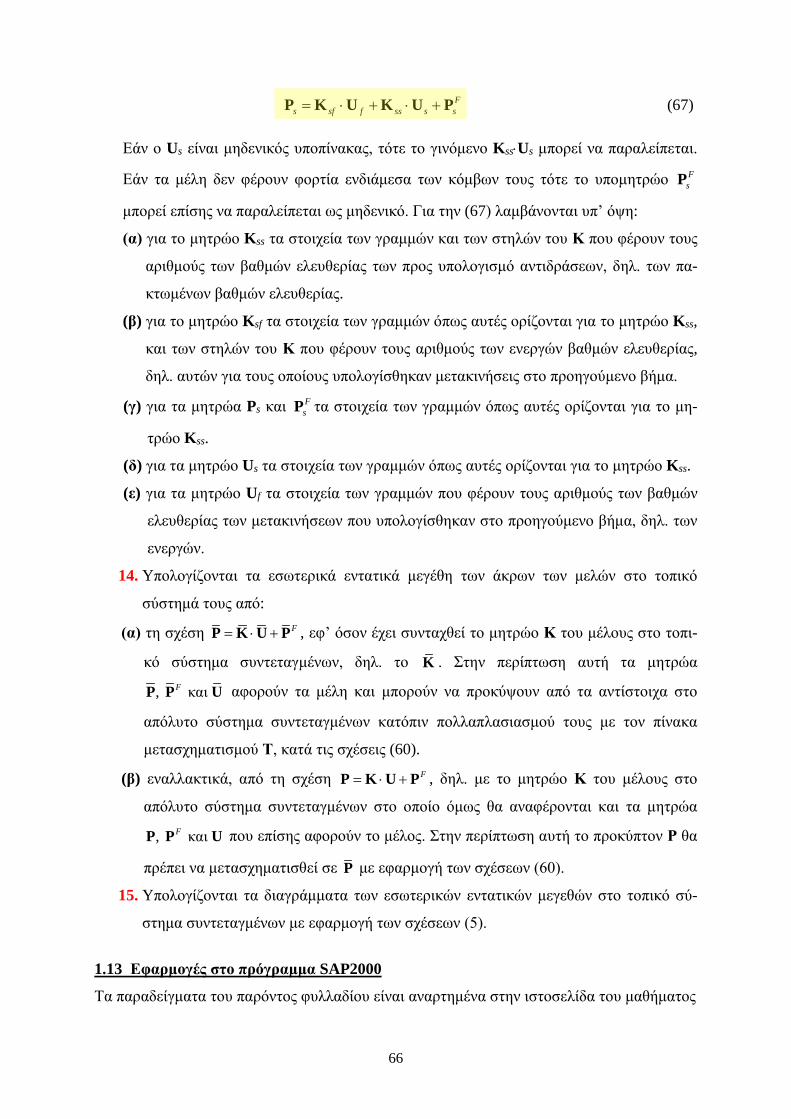
Fs sf f ss s s= ⋅ + ⋅ +P K U K U P (67)
Εάν ο Us είναι μηδενικός υποπίνακας, τότε το γινόμενο Kss⋅Us μπορεί να παραλείπεται.
Εάν τα μέλη δεν φέρουν φορτία ενδιάμεσα των κόμβων τους τότε το υπομητρώο FsP
μπορεί επίσης να παραλείπεται ως μηδενικό. Για την (67) λαμβάνονται υπ’ όψη:
(α) για το μητρώο Kss τα στοιχεία των γραμμών και των στηλών του Κ που φέρουν τους
αριθμούς των βαθμών ελευθερίας των προς υπολογισμό αντιδράσεων, δηλ. των πα-
κτωμένων βαθμών ελευθερίας.
(β) για το μητρώο Ksf τα στοιχεία των γραμμών όπως αυτές ορίζονται για το μητρώο Kss,
και των στηλών του Κ που φέρουν τους αριθμούς των ενεργών βαθμών ελευθερίας,
δηλ. αυτών για τους οποίους υπολογίσθηκαν μετακινήσεις στο προηγούμενο βήμα.
(γ) για τα μητρώα Ps και FsP τα στοιχεία των γραμμών όπως αυτές ορίζονται για το μη-
τρώο Kss.
(δ) για τα μητρώο Us τα στοιχεία των γραμμών όπως αυτές ορίζονται για το μητρώο Kss.
(ε) για τα μητρώο Uf τα στοιχεία των γραμμών που φέρουν τους αριθμούς των βαθμών
ελευθερίας των μετακινήσεων που υπολογίσθηκαν στο προηγούμενο βήμα, δηλ. των
ενεργών.
14. Yπολογίζονται τα εσωτερικά εντατικά μεγέθη των άκρων των μελών στο τοπικό
σύστημά τους από:
(α) τη σχέση F= ⋅ +P K U P , εφ’ όσον έχει συνταχθεί το μητρώο Κ του μέλους στο τοπι-
κό σύστημα συντεταγμένων, δηλ. το K . Στην περίπτωση αυτή τα μητρώα
, και FP P U αφορούν τα μέλη και μπορούν να προκύψουν από τα αντίστοιχα στο
απόλυτο σύστημα συντεταγμένων κατόπιν πολλαπλασιασμού τους με τον πίνακα
μετασχηματισμού Τ, κατά τις σχέσεις (60).
(β) εναλλακτικά, από τη σχέση F= ⋅ +P K U P , δηλ. με το μητρώο Κ του μέλους στο
απόλυτο σύστημα συντεταγμένων στο οποίο όμως θα αναφέρονται και τα μητρώα
, και FP P U που επίσης αφορούν το μέλος. Στην περίπτωση αυτή το προκύπτον Ρ θα
πρέπει να μετασχηματισθεί σε P με εφαρμογή των σχέσεων (60).
15. Yπολογίζονται τα διαγράμματα των εσωτερικών εντατικών μεγεθών στο τοπικό σύ-
στημα συντεταγμένων με εφαρμογή των σχέσεων (5).
1.13 Εφαρμογές στο πρόγραμμα SAP2000
Τα παραδείγματα του παρόντος φυλλαδίου είναι αναρτημένα στην ιστοσελίδα του μαθήματος
66
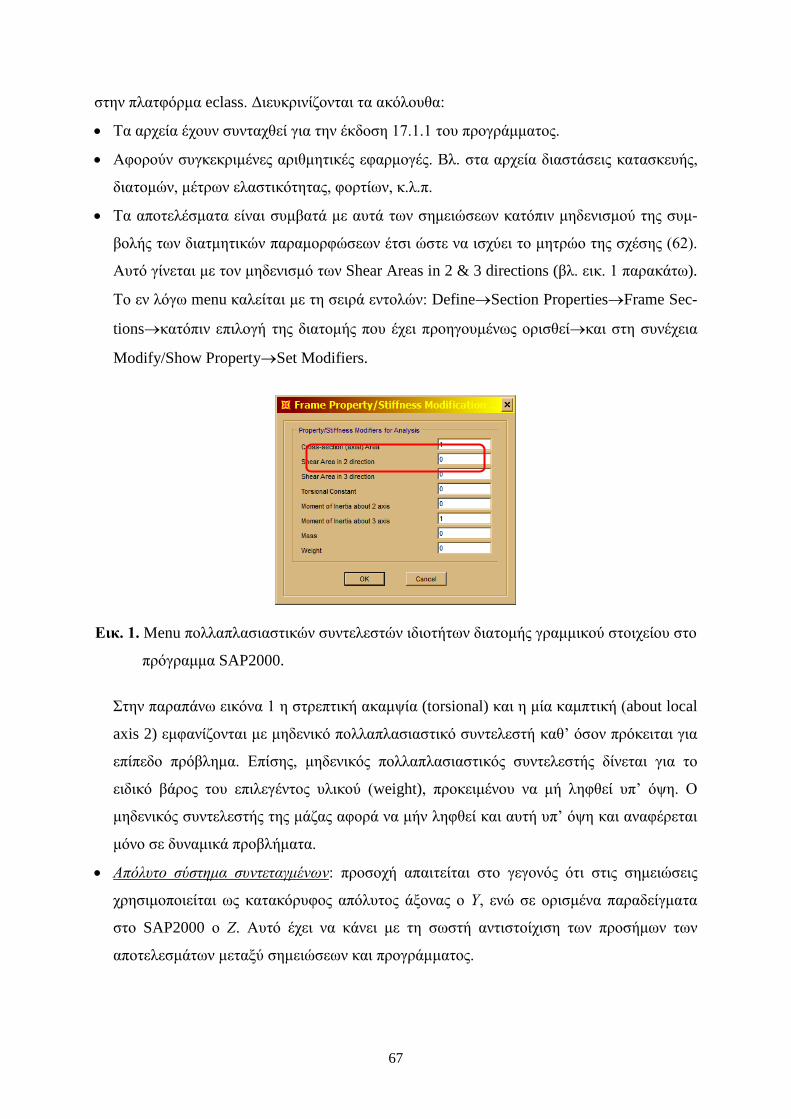
στην πλατφόρμα eclass. Διευκρινίζονται τα ακόλουθα:
• Τα αρχεία έχουν συνταχθεί για την έκδοση 17.1.1 του προγράμματος.
• Αφορούν συγκεκριμένες αριθμητικές εφαρμογές. Bλ. στα αρχεία διαστάσεις κατασκευής,
διατομών, μέτρων ελαστικότητας, φορτίων, κ.λ.π.
• Τα αποτελέσματα είναι συμβατά με αυτά των σημειώσεων κατόπιν μηδενισμού της συμ-
βολής των διατμητικών παραμορφώσεων έτσι ώστε να ισχύει το μητρώο της σχέσης (62).
Αυτό γίνεται με τον μηδενισμό των Shear Areas in 2 & 3 directions (βλ. εικ. 1 παρακάτω).
Το εν λόγω menu καλείται με τη σειρά εντολών: Define→Section Properties→Frame Sec-
tions→κατόπιν επιλογή της διατομής που έχει προηγουμένως ορισθεί→και στη συνέχεια
Modify/Show Property→Set Modifiers.
Εικ. 1. Menu πολλαπλασιαστικών συντελεστών ιδιοτήτων διατομής γραμμικού στοιχείου στο
πρόγραμμα SAP2000.
Στην παραπάνω εικόνα 1 η στρεπτική ακαμψία (torsional) και η μία καμπτική (about local
axis 2) εμφανίζονται με μηδενικό πολλαπλασιαστικό συντελεστή καθ’ όσον πρόκειται για
επίπεδο πρόβλημα. Επίσης, μηδενικός πολλαπλασιαστικός συντελεστής δίνεται για το
ειδικό βάρος του επιλεγέντος υλικού (weight), προκειμένου να μή ληφθεί υπ’ όψη. Ο
μηδενικός συντελεστής της μάζας αφορά να μήν ληφθεί και αυτή υπ’ όψη και αναφέρεται
μόνο σε δυναμικά προβλήματα.
• Απόλυτο σύστημα συντεταγμένων: προσοχή απαιτείται στο γεγονός ότι στις σημειώσεις
χρησιμοποιείται ως κατακόρυφος απόλυτος άξονας ο Υ, ενώ σε ορισμένα παραδείγματα
στο SAP2000 ο Ζ. Αυτό έχει να κάνει με τη σωστή αντιστοίχιση των προσήμων των
αποτελεσμάτων μεταξύ σημειώσεων και προγράμματος.
67
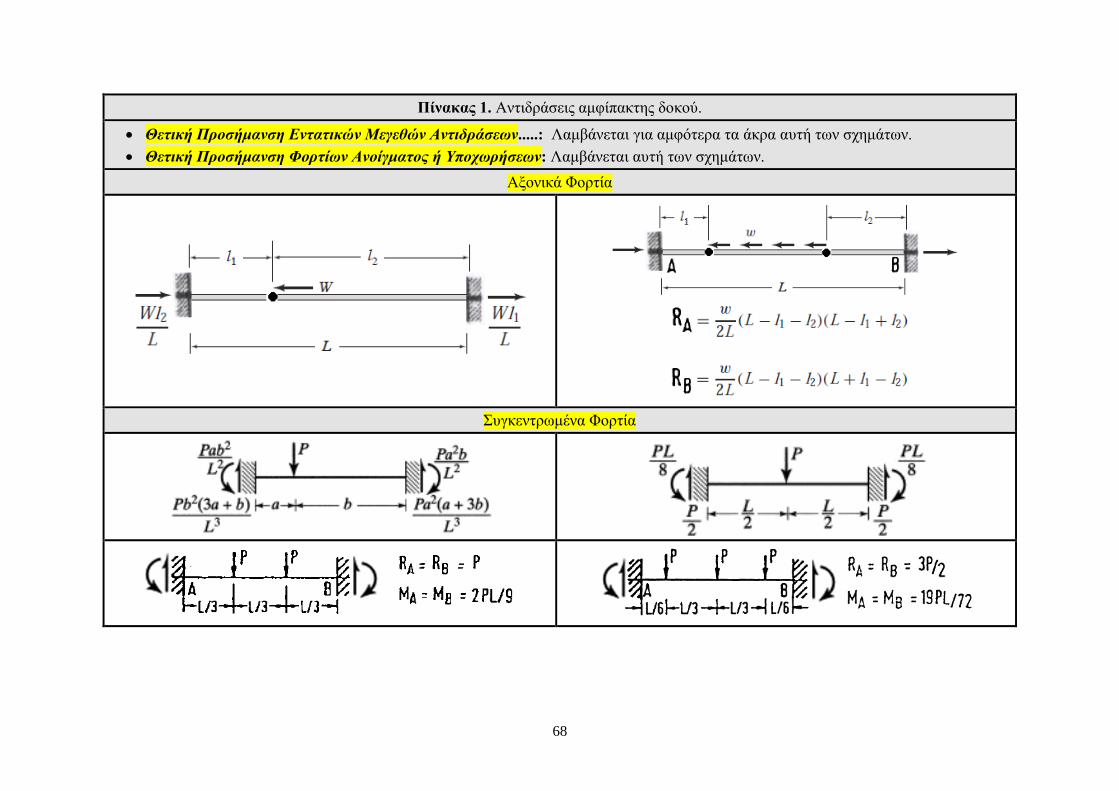
Πίνακας 1. Αντιδράσεις αμφίπακτης δοκού.
• Θετική Προσήμανση Εντατικών Μεγεθών Αντιδράσεων.....: Λαμβάνεται για αμφότερα τα άκρα αυτή των σχημάτων. • Θετική Προσήμανση Φορτίων Ανοίγματος ή Υποχωρήσεων: Λαμβάνεται αυτή των σχημάτων.
Αξονικά Φορτία
Συγκεντρωμένα Φορτία
68
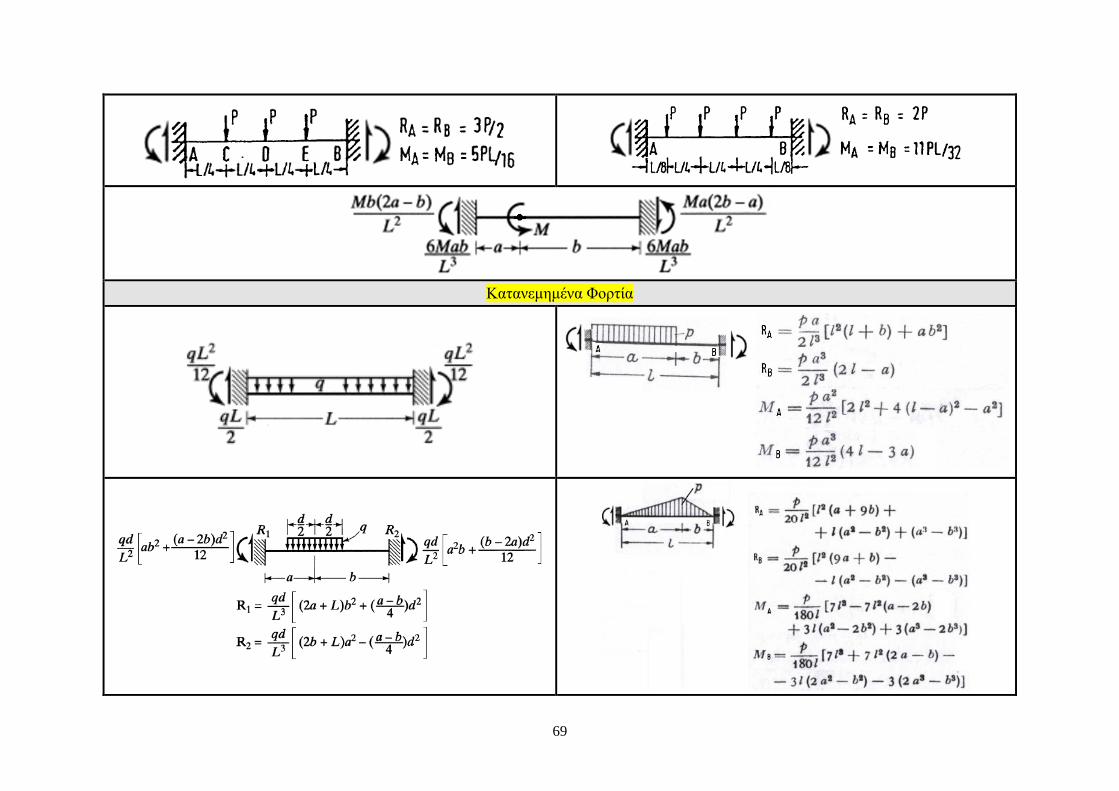
Κατανεμημένα Φορτία
69
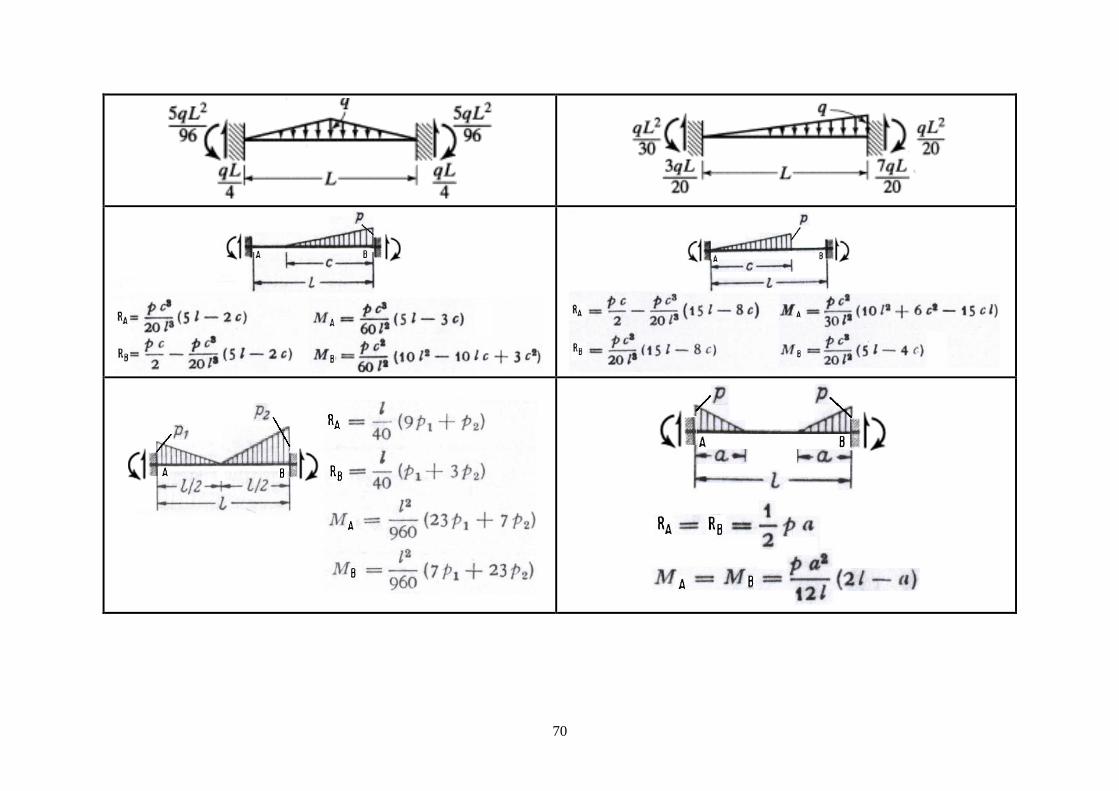
70
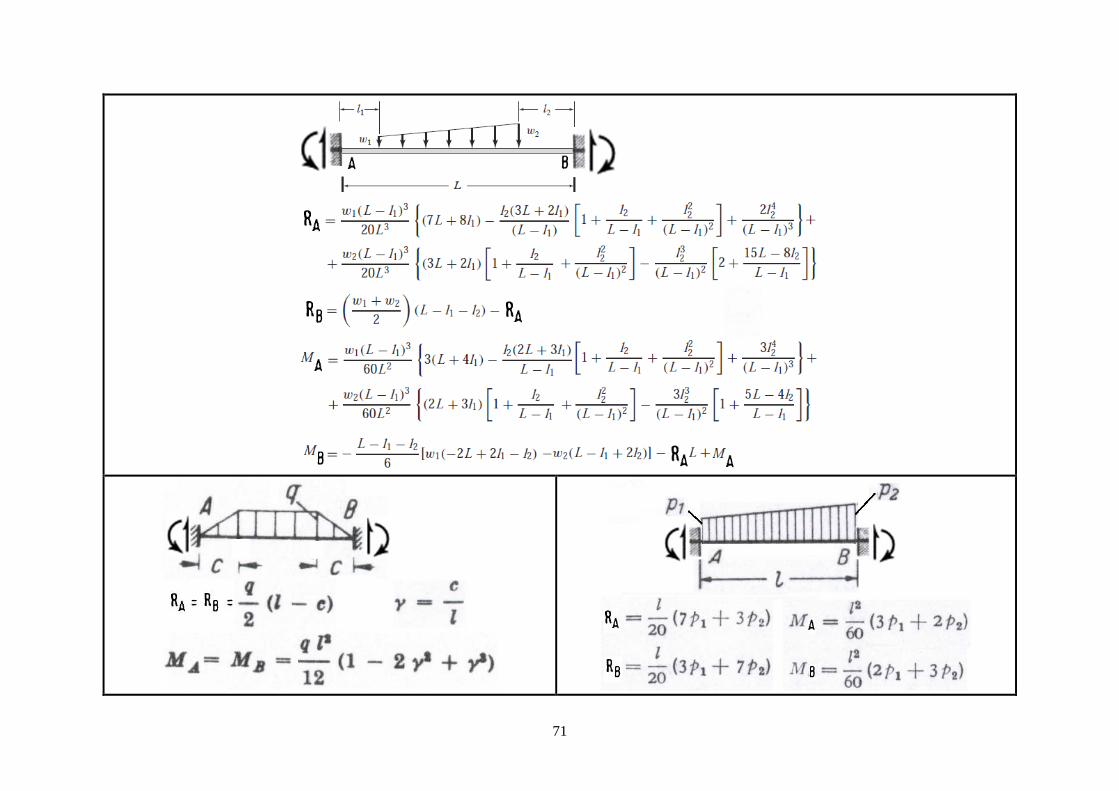
71
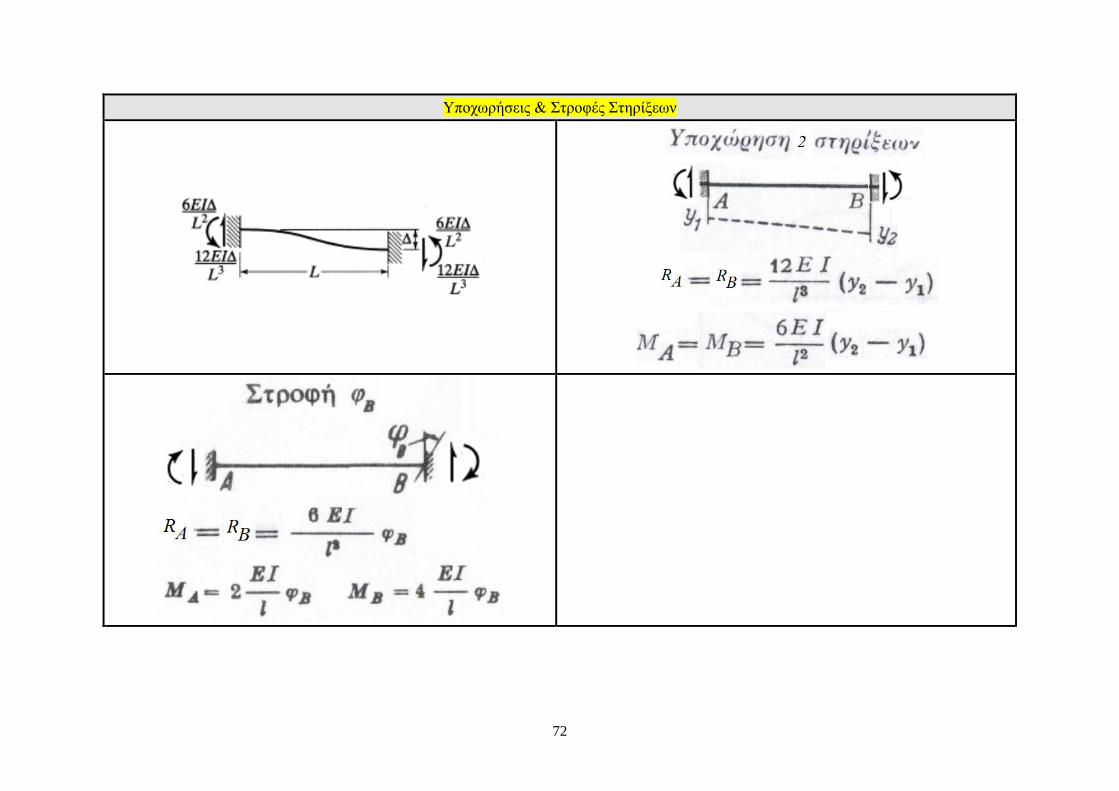
Υποχωρήσεις & Στροφές Στηρίξεων
72
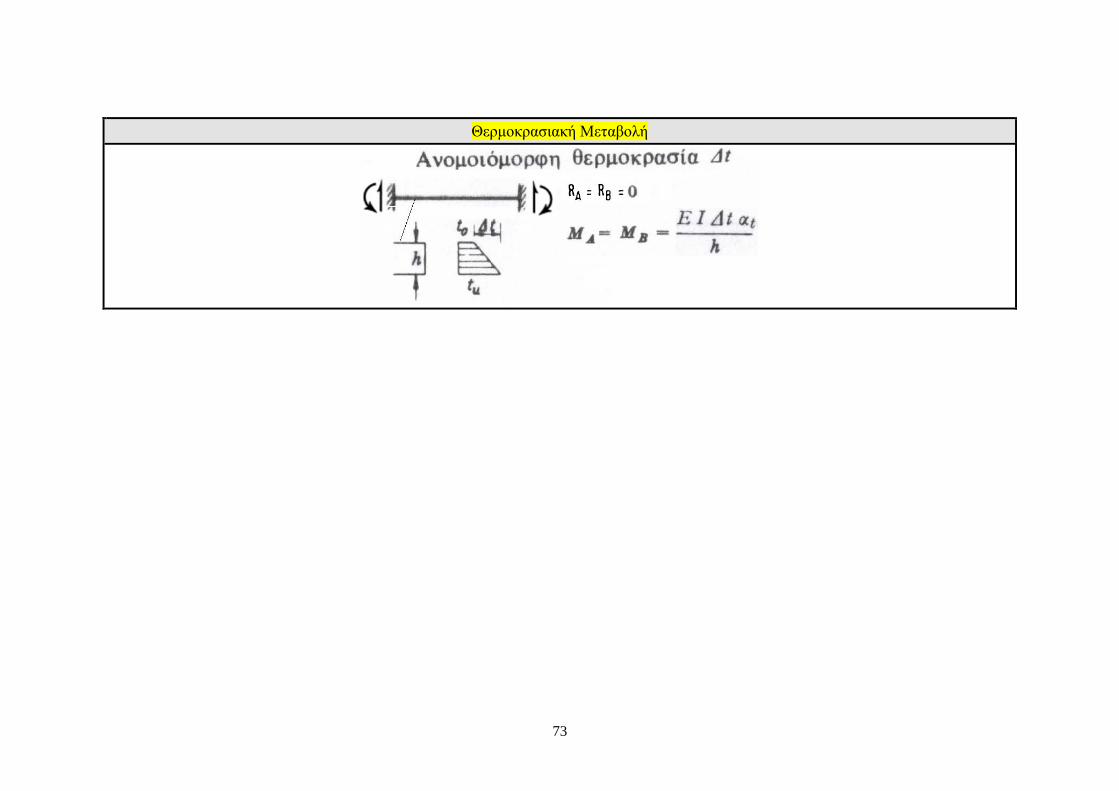
Θερμοκρασιακή Μεταβολή
73


















