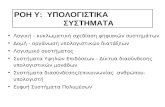
ΒΙΟΜΗΧΑΝΙΚΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ
138
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου
description
ΓΕΝΙΚΑ ΓΙΑ ΤΑ Σ.Α.Ε.
Transcript of ΒΙΟΜΗΧΑΝΙΚΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ

Εισαγωγικές έννοιες
θεωρίας Συστημάτων
Αυτομάτου Ελέγχου

Γενικά
Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου
Παραδείγματα εφαρμογών Συστημάτων Ελέγχου
Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της.
Μαθηματικό υπόβαθρο για την μελέτη των Συστημάτων Ελέγχου

• Τι είναι ένα Σύστημα Ελέγχου (Ορισμός)
Σύστημα αυτομάτου ελέγχου ονομάζεται ένα σύνολο
(τεχνητό ή φυσικό) στοιχείων και εξαρτημάτων κατάλληλα
συνδεδεμένα μεταξύ τους που μπορεί να ελέγχει μια διεργασία
ή ορισμένα μεταβλητά μεγέθη όπως:
θέση (x, y, z)
ταχύτητα
πίεση
ηλεκτρική τάση
θερμοκρασία κ.λ.π.

•Βασική Δομή Συστήματος Ελέγχου Κλειστού
Βρόγχου
Μετατροπέας Έξοδος
Output
Είσοδος
Input Ελεγκτής Επενεργούν
στοιχείο Σύστημα
Διαταραχή
Στοιχείο
Ανάδρασης
R y1 E
y2
C

* Είσοδος (input)
- Μια διέγερση που εφαρμόζεται στο σύστημα από εξωτερική πηγή.
* Μετατροπέας (transducer)
- Μετατρέπει μια μορφή ενέργειας σε μια άλλη π.χ.
μηχανική σε ηλεκτρική.

* Ελεγκτής (Controller)
- Παράγει μια έξοδο που οδηγεί την ελεγχόμενη διεργασία με
σκοπό τον μηδενισμό του σφάλματος και γενικά την
βελτιστοποίηση των χαρακτηριστικών του συστήματος.

* Επενεργούν στοιχείο (Actuator)
-Το Επενεργούν Στοιχείο είναι η συσκευή που αποδίδει την
απαιτούμενη ενέργεια στην διεργασία (π.χ. η συσκευή που
αναγκάζει την διεργασία να εξασφαλίσει την έξοδο).

* Σύστημα (plant)
-Σύστημα τύπου follow-up: Τα συστήματα των οποίων η έξοδος θα πρέπει
να μεταβάλλεται σε συνάρτηση των μεταβολών του σήματος εισόδου (π.χ.
σύστημα ελέγχου θερμοκρασίας χώρου).
-Σύστημα τύπου regulator: Τα συστήματα των οποίων η έξοδος θα πρέπει
να παραμένει σταθερή ακόμα και όταν υπάρχουν μεταβολές του σήματος
εισόδου (π.χ. σταθεροποιητής τάσεως DC).

*Διαταραχή (disturbance)
-Διαταραχή είναι κάθε μη επιθυμητό σήμα που επηρεάζει την έξοδο.
* Ανάδραση (feedback)
- Ένα σύστημα χρησιμοποιεί ανάδραση εάν η έξοδος
ή μέρος της εξόδου επιστρέφει μέσω του κλάδου ανατροφοδότησης (ανάδρασης) στον αθροιστή, έτσι που να μπορεί να συγκριθεί με την είσοδο. Η χρήση της ανάδρασης συνήθως επιφέρει ευστάθεια και ακρίβεια στο σύστημα.
Ελεγκτής Διεργασία Επιθυμητή
απόκριση Εξόδου
Έξοδος Σύγκριση
Μέτρηση

* Έξοδος (Output)
- Το σύστημα διεγειρόμενο από την είσοδο παράγει ένα σήμα εξόδου σαν απόκριση.
ζ=0
ζ=0.2
ζ=1
ζ=0.5
ζ=2
ζ=4
y(t)

• Παραδείγματα Σ.Α.Ε.
• Αυτόματος πιλότος αεροσκαφών
• Έλεγχος θέσης ανάγνωσης κεφαλής σκληρού δίσκου
• Σύστημα Ελέγχου Ρομποτικού βραχίονα
• Αυτόματο Σύστημα Ελέγχου ταχύτητας οχημάτων
• (cruise control system)

• Κατηγορίες Σ.Α.Ε.
Τα Σ.Α.Ε. μπορούμε να τα κατατάξουμε σε κατηγορίες ως εξής:
Ανάλογα με τη φύση του μέσου ελέγχου * Ηλεκτρικά – ηλεκτρονικά συστήματα
* Πνευματικά συστήματα
* Υδραυλικά συστήματα
* Ηλεκτροϋδραυλικά συστήματα
* Ηλεκτροπνευματικά συστήματα
Ανάλογα με το αν χρησιμοποιείται ή όχι ανάδραση
(ανατροφοδότηση) * Συστήματα ανοιχτού βρόγχου
Έξοδος
Επιθυμητή
απόκριση
Εξόδου
Επενεργούν
Στοιχείο Διεργασία
G Είσοδος
R
Έξοδος
C
C(s)G(s)
R(s)

* Συστήματα Ελέγχου Κλειστού Βρόγχου
Ανάλογα με την τεχνική επεξεργασία των σημάτων
έλέγχου * Αναλογικά
* Ψηφιακά
Ελεγκτής Διεργασία Επιθυμητή
απόκριση Εξόδου
Έξοδος Σύγκριση
Μέτρηση
( ) ( )( )
( ) 1 ( ) ( )
C s G sG s
R s G s H s
G Είσοδος
R
Έξοδος
C
H

20dy dt y
2 2 cos 0d y dt y
Ανάλογα με τον τύπο των εξαρτημάτων
* Γραμμικά
- Ένα σύστημα θεωρείται γραμμικό όταν ακολουθεί την αρχής της
επαλληλίας.
Π.χ. Αν όλες οι αρχικές συνθήκες ενός συστήματος είναι μηδενικές, δηλαδή αν
το σύστημα είναι σε ηρεμία, τότε το σύστημα είναι γραμμικό αν έχει την
ακόλουθη ιδιότητα:
(α) μία είσοδος u1(t) παράγει μια έξοδο y1(t), και
(β) μία είσοδος u2(t) παράγει μια έξοδο y2(t), τότε,
(γ) η είσοδος c1u1(t)+ c2u2(t) παράγει μια έξοδο c1y1(t)+ c2y2(t), για οποιοδήποτε
ζευγάρι εισόδων u1(t) και u2(t) και σταθερές c1 και c2.
Τα γραμμικά συστήματα μπορούν συχνά να παρασταθούν με γραμμικές
διαφορικές εξισώσεις και γραμμικές εξισώσεις διαφοράς.
* Μη - γραμμικά
- Όλα τα υπόλοιπα είναι μη γραμμικά
Π.χ. Οι συνήθεις διαφορικές εξισώσεις και
είναι μη – γραμμικές διότι ο όρος της πρώτης εξίσωσης είναι δευτέρου βαθμού, και ο
όρος cosy στην δεύτερη εξίσωση δεν είναι πρώτου βαθμού πράγμα που ισχύει για όλες
τις υπερβατικές συναρτήσεις.

Ανάλογα με την εφαρμογή τους
* Σερβομηχανισμοί
* Αριθμητικά συστήματα ελέγχου
* Ακολουθιακά συστήματα Ελέγχου
*Συστήματα πολύπλοκων διεργασιών

Παραδείγματα
Έλεγχος Ταχύτητας Περιστρεφόμενου Δίσκου
Ενισχυτής
συνεχούς
ρεύματος (DC)
Μονάδα Ελέγχου
(Control Device)
Ενισχυτής
(Amplifier)
Επιθυμητή τιμή
ταχύτητας
(τάση)
Επενεργούν Στοιχείο
(Actuator)
Κινητήρας
συνεχούς
ρεύματος (DC)
Διεργασία
Process
Περιστρεφόμενος
δίσκος
Πραγματική
τιμή
ταχύτητας
(β)
(α)
Ταχύτητα Περιστρεφόμενος
δίσκος
Κινητήρας συνεχούς
ρεύματος (DC)
Μπαταρία
Ρύθμιση
ταχύτητας
(α) Σύστημα ελέγχου ταχύτητας περιστρεφόμενου δίσκου ανοιχτού βρόγχου (χωρίς ανάδραση)
(β) Το λειτουργικό διάγραμμα του συστήματος.

Επιθυμητή
τιμή ταχύτητας
(τάση)
(β)
(α)
Ταχύτητα
Ταχογεννήτρια
+ _
Ρύθμιση
ταχύτητας
_
+
Αισθητήρας
Ταχογεννήτρια
Σήμα (τάση)
σφάλματος
Πραγματική τιμή ταχύτητας
τάση
Περιστρεφόμενος
δίσκος
Ενισχυτής
συνεχούς
ρεύματος (DC)
Κινητήρας συνεχούς
ρεύματος (DC)
Μπαταρία
Μονάδα Ελέγχου
(Control Device)
Ενισχυτής
(Amplifier)
Επενεργούν Στοιχείο
(Actuator)
Κινητήρας
συνεχούς
ρεύματος (DC)
Διεργασία
Process
Περιστρεφόμενος
δίσκος
Μετρούμενη
ταχύτητα
(τάση)
(α) Σύστημα ελέγχου ταχύτητας περιστρεφόμενου δίσκου κλειστού βρόγχου
(β) Το λειτουργικό διάγραμμα του συστήματος.

• Περιγραφή Συστημάτων
- Ένα σύστημα ελέγχου θα πρέπει να περιγραφεί και με μια
μαθηματική παράσταση που θα περιγράφει τη σχέση μεταξύ
εισόδου και εξόδου του συστήματος. Τα επικρατέστερα
μαθηματικά μοντέλα για την περιγραφή συστημάτων είναι:
1. Οι ολοκληρωδιαφορικές εξισώσεις.
2. Η συνάρτηση μεταφοράς.
3. Η κρουστική απόκριση.
4. Οι εξισώσεις κατάστασης.

• Περιγραφή Συστημάτων
- Έστω ότι ένα γραμμικό μη χρονικά μεταβαλλόμενο σύστημα μιας
εισόδου μιας εξόδου όπως το παρακάτω με είσοδο x(t) και έξοδο y(t)
περιγράφεται από την παρακάτω διαφορική εξίσωση.(n m)
g(t) Είσοδος
x(t)
Έξοδος
y(t)
1 1
1 0 1 0
( ) ( ) ( ) ( )( ) ( )
n n m m
n n m mn n m m
d y t d y t d x t d x ta a a y t b b b x t
dt dt dt dt

- Η Συνάρτηση μεταφοράς του Σ.Α.Ε. που περιγράφεται
από την παραπάνω διαφορική εξίσωση είναι το πηλίκο της μετασχηματισμένης εξόδου δια την μετασχηματισμένη είσοδο με μηδενικές αρχικές συνθήκες.
( )έ Έ
G sέ ί
1 1
1 0 1 0
( ) ( ) ( ) ( )( ) ( )
n n m m
n n m mn n m m
d y t d y t d x t d x ta a a y t b b b x t
dt dt dt dt
1 10 0
n
n n n
n
d f ts F s s f f
dtΙσχύει
Άρα 1 1
1 0 1 0( ) ( ) ( ) ( ) ( ) ( )n n m m
n n m ma s Y s a s Y s a Y S b s X s b s X s b X s
1
1 1 0
1
1 1 0
( )( )
( )
m m
m m
n n
n n
b s b s b s bY sG s
X s a s a s a s a
G(s) Είσοδος
X(s)
Έξοδος
Y(s)

Ανάλογα συστήματα
* Μηχανικό σύστημα
2
2
2
2
( ) ( ) ( ) ( ) (1)
( ) ( )( )
( )( ) ( )
( ) ( )
( ) ( )(1) ( ) ( )
M D C
M
D
C
f t f t f t f t
d t d y tf t m a m m
dt dt
dy tf t D t D
dt
f t C y t
d y t dy tf t m D C y t
dt dt2
2
2
2
2
( ) ( )( ) ( ) ( )
1( )
( )
d y t dy tL f t L m D C y t F s m s Y s D sY s C Y s
dt dt
Y sF s m s D s C Y s
F s m s D s C

* Ηλεκτρικό ανάλογο
0
( ) ( ) ( ) ( )
( ) 1( ) ( ) ( ) (1)
L R C
t
Vi t U t U t U t
di tVi t L R i t i t dt
dt C
22
2
2
2
( ) ( )( ) ( ) ( )
1( ) 1
( ) 1
d Vo t dVo tL Vi t L LC RC Vo t Vi s LC s Vo s RC sVo s Vo s
dtdt
Vo sVi s LC s RC s Vo s
Vi s LC s RC s
Vi(t) Vo(t)
VC(t)
VL(t) VR(t)
R L
C i(t)
2
2
2
2
( ) ( ) ( ) 1( ) (1) ( ) ( ) (2)
( ) ( ) ( )( ) (2) ( ) ( )
dQ t d Q t dQ ti t Vi t L R Q t
dt dt Cdt
Q t d Vo t dVo tVo t Vi t LC RC Vo t
C dtdt

• Μετασχηματισμός Laplace
0
1
( ) ( )
( ) ( )
( ) ( )
stF s f t e dt
L f t F s
L F s f t

• Βασικές Ιδιότητες Μετασχηματισμού Laplace
10
Θεώρημα
τελικής τιμής 19 9
Θεώρημα
αρχικής τιμής 18 8
17 7
16 6
15 5
14 4
13 3
12 2
11 1
α/α α/α f t
1 2f t f t
( ) ( )df t
f t f tdt
2
2
d f tf t f t
dt
n
n
n
d f tf t
dt
0
t
f t dt
0 0
t t
f t dt
nf t dt
f t r u t r
nt f t
f t
t
0
stF s f t e dt
1 2F s F s
0s F s f
2 0 0s F s sf f
1 10 0n n ns F s s f f
10F s f
s s21
2 2
0 0F s f f
s s s
1 0
nk
nk t
F sf t dt
s
rse F s
1n
n
n
dF s
ds
s
f t0
stF s f t e dt
1 2f t f t 1 2F s F s
1 2f t f t 1 2
1
2
c j
c jF p F s p dp
j
te f tF s
tf F s
cosf t t1 1
2 2F s j F s j
f tsF
n
f t
t
n
s sF s ds
0
limt
f t
0lims
s F slimt
f t
lims
s F s

• Μετασχηματισμοί Laplace Βασικών Συναρτήσεων
7
13 6
12 5
11 4
10 3
9 2
8 1
α/α α/α F s LT f t f t ILT F s
1
s
2
1
s
1ns
ns
1
s
1/2
1ns
se
s
11 se
s
1t
u t
Θετικός αριθμός
Θετικός αριθμός
t
11,
1 !
nt nn
1d tt
dt
,nt n
1
t
1/2
1/2
2
1 3 5 2 1
n nt
n
u t
u t u t
s
F s LT f t f t ILT F s
Θετικός αριθμός
1
s
1n
s
1
s s a
te
11,
1 !
n tt e nn
1 te

• Ιδιότητες Μιγαδικών Αριθμών
8
7
6
5
4
3
2
μέτρο μιγάδα 1
α/α
2 2 ,r
1tan , , 0
1tan , 0 0
1180 tan , 0 0o
1180 tan , , 0o
2cosj je e
2 sinj je e j
1 1 2 2 1 2 1 2( ) ( ) (( ) ( )j j j
1 1 2 2 1 2 1 2( ) ( ) (( ) ( )j j j
1 2 1 2( )
1 2 1 2
j j jre r e rr e
1
1 2
2
( )1 1
2 2
jj
j
r e re
r e r
cos sinjs j re r r j

- Ο αντίστροφος μετασχηματισμός είναι η διαδικασία υπολογισμού της
συναρτήσεως g(t) όταν γνωρίζουμε την συνάρτηση G(s).
* Περίπτωση Διακεκριμένων Πόλων
Έστω η συνάρτηση
Γράφουμε τη συνάρτηση στην παρακάτω μορφή αφού υπολογίσουμε τις ρίζες του
παρονομαστή που ονομάζονται και πόλοι της συνάρτησης.
Υπολογίζουμε τις τιμές των συντελεστών ki από τη σχέση:
Χρησιμοποιώντας τους παραπάνω πίνακες η σχέση γίνεται:
είναι είτε πραγματικοί είτε μιγαδικοί αριθμοί.
• Αντίστροφος Μετασχηματισμός Laplace
1
1 1 0
1
1 1 0
,m m
m m
n n
n n
N s b s b s b s bG s m n
D s s s s
1 2 1 2
1 2 1 2
m n
n n
N s s z s z s z kk kG s
D s s p s p s p s p s p s p
limi
i is p
k G s s p
1 2
1 2( ) ........ np tp t p t
ng t k e k e k e
1 2 1 2, , , , , ,n mp p p z z z

1
1 1 0
1
1 1 0
,m m
m m
n n
n n
N s b s b s b s bG s m n
D s s s s
1 2
1 2
11 12 1 2
2
1 21 1
m
r
n
nr
r
n
N s s z s z s zG s
D s s p s p s p
kk k k k
s p s p s ps p s p
1
!lim
i
r jr
ij ir js p
dk G s s p
r j ds
* Περίπτωση πολλαπλών πόλων
- Εάν η συνάρτηση έχει πολλαπλές ρίζες (πόλους),
τότε οι συντελεστές που αντιστοιχούν στην πολλαπλή ρίζα υπολογίζονται ως εξής :
όπου i εκφράζει την ρίζα (απλή ή πολλαπλή) της οποίας τον συντελεστή υπολογίζουμε.
όπου j εκφράζει την θέση του συντελεστή k της πολλαπλής ρίζας με τιμές από 1μεχρι r.
όπου r ο αριθμός που εκφράζει την πολλαπλότητα της ρίζας.

•Βασικές Συναρτήσεις Διέγερσης Συστημάτων
3
2
1
α/α Ονομασία Γραφική Παράσταση Μετ.
Laplace Εξίσωση
Μοναδιαία
Βηματική
Συνάρτηση u(t)
1 0
0 0
0
t
u t t
ό t
1U s
s
Μοναδιαία
Κρουστική
Συνάρτηση δ(t)
Dirac
Μοναδιαία
Αναρριχητική
Συνάρτηση r(t)
0 για 0
0
tt
t
1D s
0
0 0
t tr t
t 2
1R s
s

•Βασικές Συναρτήσεις Διέγερσης Συστημάτων
6
5
4
α/α Ονομασία Γραφική Παράσταση Μετ.
Laplace Εξίσωση
Μοναδιαία
Συνάρτηση
Πύλης g(t)
1 0,
0 0,
0,
t T
g t t T
ό t t T
1 1 TsU s es s
Εκθετική
Συνάρτηση f(t)
Ημιτονοειδής
Συνάρτηση f(t)
tf t e
1F s
s a
sinf t t2 2
F ss

Παραδείγματα
1. Να υπολογιστεί η χρονική απόκριση της εξόδου C(t) του
εικονιζόμενου συστήματος, όταν διεγείρεται με μοναδιαία
βηματική είσοδο.
R(s) C(s) +
-
100
10s
1 2
10
2110
110 110
100
1 100 110( )100 110 110
110
100 100lim
110 110 100 1 100 1( )
100 100 110 110 110lim 110
110 110
100 100 100( ) ( ) 1
110 110 110
s
s
t t
K KsC ss s s s s
s
K ss s
C ss s
K ss s
c t e c t e

2. Να υπολογιστεί η χρονική απόκριση της εξόδου C(t) με
μοναδιαία βηματική είσοδο
R(s) C(s) 2
8
2s s s
311 12 4
2 22 2 2
2
11 2 20 0 0
02
12 0 20 0
8 1 8 8( )
1 21 22 2
8 2 11 8 1 8 8lim lim lim 2
2 1 ! 1! 1 2 41 2 1 2
1 8 1lim lim
2 2 ! 0!1 2
s s s
s s
KK K KC s
s s s ss s s ss s s s s s
sd dK s
ds ds s ss s s s s
dK s
ds s s s
3 2 21 1
4 2 22 2
2
2
8 84
1 2 2
8 8 8 8lim 1 lim
3 31 2 2
8 8 8 2lim 2 lim
12 31 2 1
2 4 8 1 2 1 8 2( ) ( ) 2 4
3 1 3 2 3 3
s s
s s
t t
s s
K ss s s s s
K ss s s s s
C s c t t e es s ss

•Μετασχηματισμοί δομικών διαγραμμάτων
3
2
1
α/α Αρχικό Διάγραμμα Ισοδύναμο Διάγραμμα

•Μετασχηματισμοί δομικών διαγραμμάτων
6
5
4
α/α Αρχικό Διάγραμμα Ισοδύναμο Διάγραμμα

Παράδειγμα
R(s) Y(s) +
-
+ +
G3(s) G2(s)
G1(s)
G5(s) +
-
G4(s)
G6(s) G7(s)
1. Να υπολογιστεί η Συνάρτηση Μεταφορά (Σ.Μ) του εικονιζόμενου
συστήματος:
R(s) +
-
+ +
G3(s) G2(s)
G1(s) G4(s)
G5(s) +
-
G4(s)
G6(s) G7(s)
GA(s)
GB(s) Y(s)
4 5 7
3
1 3 4
( ) ( ) ( ) ( )
( )( )
1 ( ) ( ) ( )
A
B
G s G s G s G s
G sG s
G s G s G s

R(s) +
-
GB(s) G2(s) GA(s)
G6(s)
Y(s)
GΓ(s)
32
1 3 42
32 62 6
1 3 4
2 3
1 3 4 2 3 6
( )( )
1 ( ) ( ) ( )( ) ( )( )
( )1 ( ) ( ) ( )1 ( ) ( )
1 ( ) ( ) ( )
( ) ( )
1 ( ) ( ) ( ) ( ) ( ) ( )
B
B
G sG s
G s G s G sG s G sG s
G sG s G s G sG s G s
G s G s G s
G s G s
G s G s G s G s G s G s
R(s) GΑ(s) GΓ(s) Y(s)
2 3 4 5 7
1 3 4 2 3 6
2 3 4 5 2 3 7
1 3 4 2 3 6
( ) ( ) ( ) ( ) ( )( )( ) ( )
( ) 1 ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
1 ( ) ( ) ( ) ( ) ( ) ( )
A
G s G s G s G s G sY sG s G s
R s G s G s G s G s G s G s
G s G s G s G s G s G s G s
G s G s G s G s G s G s

• Βασικά χαρακτηριστικά συστημάτων
ελέγχου
Ευστάθεια
Ακρίβεια
Ταχύτητα Απόκρισης
Ευαισθησία

Ευστάθεια Ένα σύστημα είναι ευσταθές, αν για φραγμένη είσοδο η έξοδος είναι φραγμένη. Η έξοδος ενός ευσταθούς συστήματος βρίσκεται μέσα σε επιτρεπτά όρια, ενώ η έξοδος ενός ασταθούς συστήματος αυξάνει θεωρητικά προς το άπειρο.

Ακρίβεια
Η απόκλιση μεταξύ επιθυμητής και της πραγματικής τιμής να
είναι μηδενική.

Ταχύτητα Απόκρισης
Ένα σύστημα θα πρέπει να ανταποκρίνεται με ικανοποιητική
ταχύτητα στις μεταβολές του σήματος εισόδου και να οδηγεί την
έξοδο σε μια σταθερή τελική τιμή σε εύλογο χρονικό διάστημα.

Ευαισθησία Η ευαισθησία είναι η μέτρηση του πόσο εύκολα μεταβάλλεται η
έξοδος ενός συστήματος σε μεταβολές των παραμέτρων του ίδιου του συστήματος όπως και σε πιθανές εξωτερικές διαταραχές.
( )( ) ,
( )
Y sT s
R s
( )( ) .
1 ( ) ( )
G sT s
G s H s
;T
G
T GS
G T
2
( ) 1 ( ) ( ) ( ) ( ).
1 ( ) ( ) 1 ( ) ( )
T G s G s H s H s G s
G G G s H s G s H s
2
1 ( )
( ) / (1 ( ) ( ))(1 ( ) )
T
G
G sS
G s G s H sG s H
1.
1 ( ) ( )
T
GSG s H s

2
( ) ( ) ( ) ( ).
1 ( ) ( ) ( ) / (1 ( ) ( )) 1 ( ) ( )
T
H
G s H s G s H sS
G s H s G s G s H s G s H s
;T
H
T HS
H T
2
( ) ( ) ( ).
1 ( ) ( ) 1 ( ) ( )
T G s G s G s
H H G s H s G s H s

ΜΕΙΩΣΗ ΕΥΑΙΣΘΗΣΙΑΣ ΤΟΥ ΣΚΒ ΣΕ ΣΗΜΑΤΑ ΔΙΑΤΑΡΑΧΩΝ

• Τύποι συστημάτων και σταθερές σφαλμάτων Το παρακάτω σύστημα ελέγχου κλειστού βρόγχου έχει
συνάρτηση μεταφοράς: ( ) ( )
( )( ) 1 ( ) ( )
C s G sG s
R s G s H s
G(s) R (s) C(s)
H(s)
E(s) +
-
Z(s)
Η συνάρτηση μεταφοράς ανοικτού βρόγχου είναι:
όπου r ο αριθμός των μηδενικών ριζών του πολυωνύμου του παρονομαστή της συνάρτησης.
*Ένα σύστημα ονομάζεται τύπου r αν έχει r πόλους στο σημείο s=0.
1
1
( ) ( )
m
i
i
kr
j
j
s z
G s H s
s s p

Ο ορισμός του σφάλματος δίνεται από τη σχέση:
Το σφάλμα στη μόνιμη κατάσταση ορίζεται από τη σχέση:
Ορίζουμε:
Σταθερά σφάλματος θέσης την τιμή:
Σταθερά σφάλματος ταχύτητας την τιμή:
Σταθερά σφάλματος επιτάχυνσης την τιμή:
( )( )
1 ( ) ( )
R sE s
G s H s
0lim ( ) lim ( )sst s
e e e t sE s
0lim ( ) ( )Ps
K G s H s
0lim ( ) ( )vs
K sG s H s
2
0lim ( ) ( )as
K s G s H s

Γραφική αναπαράσταση μονίμου σφάλματος συστήματος ελέγχου για συγκεκριμένες συναρτήσεις εισόδου και τύπους
συστημάτων

Οι τιμές των σφαλμάτων για τις περιπτώσεις της κύριας διαγωνίου της παραπάνω γραφικής απεικόνισης που δίνεται σε μορφή πίνακα 3Χ3 είναι οι εξής:
1. Είσοδος και σύστημα τύπου 0
2. Είσοδος και σύστημα τύπου 1
3. Είσοδος και σύστημα τύπου 2
( )P
R ss
0 0
0
lim ( ) lim ( ) lim1 ( ) ( ) 1 lim ( ) ( ) 1
sst s s
ps
P
P Pse e e t sE s sG s H s G s H s K
2( )
VR s
s
2
0 0
0
lim ( ) lim ( ) lim1 ( ) ( ) lim( ( ) ( ))
sst s s
vs
V
V Vse e e t sE s sG s H s s sG s H s K
3( )
AR s
s
3
2 20 0
0
lim ( ) lim ( ) lim1 ( ) ( ) lim( ( ) ( ))
sst s s
as
A
A Ase e e t sE s sG s H s Ks s G s H s

• Χρονική απόκριση συστημάτων 1ης & 2ης τάξης
* Εισαγωγικές έννοιες και ορισμοί
Με τον όρο χρονική απόκριση ενός συστήματος, εννοούμε τη συμπεριφορά του συστήματος συναρτήσει του χρόνο όταν διεγείρεται από μία συγκεκριμένη είσοδο.
Η χρονική απόκριση ενός συστήματος ελέγχου αποτελείται από δύο μέρη:
Τη μεταβατική απόκριση (transient response) και
Την απόκριση μόνιμης κατάστασης (steady state response).
Αν c(t) ονομάσουμε την απόκριση του συστήματος (έξοδος) τότε έχουμε:
c(t) = ct(t) + css(t) όπου: ct(t) = απόκριση μεταβατικής κατάστασης.
css(t) = απόκριση μόνιμης κατάστασης.

* Συστήματα πρώτης τάξης
Ας θεωρήσουμε το δομικό διάγραμμα του συστήματος 1ης τάξης του παρακάτω σχήματος
Η συνάρτηση μεταφοράς θα είναι της μορφής:
όπου Τ είναι η σταθερά χρόνου του συστήματος.
( ) 1( )
( ) 1
C sG s
R s Ts
R (s) 1/Τs C(s) +
-

*Απόκριση συστήματος πρώτης τάξης σε διέγερση μοναδιαίας βαθμίδας
Η απόκριση του συστήματος για είσοδο της μορφής r(t) = u(t) θα είναι:
Στο παρακάτω σχήμα απεικονίζεται η καμπύλη της
απόκρισης C(t), για σταθερές χρόνου T1 < Τ2 < T3.
1 1 1 1( ) ( ) 1
1
t
TC t L C s L eTs s

Η έξοδος ανεβαίνει εκθετικά από την τιμή 0 προς την τελική τιμή 1.
Η αρχική κλίση της καμπύλης στον χρόνο t=0 δίνεται από:
και η τιμή της εξόδου για t =Τ
όπου η Τ είναι η σταθερά χρόνου του συστήματος ή ταχύτητα
απόκρισης.
00
( ) 1 1tTt
t
dc te
dt T T
1( ) 1 0,6321C T e

Χρόνος ανόδου tr
Εάν t1 είναι ο χρόνος στον οποίο η έξοδος έχει φτάσει στο
10% της τελικής της τιμής και t2 ο χρόνος στον οποίο η έξοδος
έχει φτάσει στο 90% της τελική τιμής τότε:
Χρόνος αποκατάστασης ts 2%
Είναι ο χρόνος στον οποίο η έξοδος του συστήματος
διαφέρει από την τελική της τιμή κατά 2%. Επομένως:
1
2
1
2
2 1
1 0,1 ln 0,9 0,1
1 0,9 (ln 0,1) 2,3
2,2
tT
tT
r
e t T T
e t T T
Ά t t t T
1 1 0,02 ln 0,02 4stT
s se t T t T

1 1
2
1 1( ) ( ) , 0
1
t
TC t L C s L t T Te tTs s
t
c(t)
Μόνιμο σφάλμα
r(t)=t
c(t)
T
* Απόκριση συστήματος πρώτης τάξης σε διέγερση
μοναδιαίας αναρρίχησης
Η απόκριση του συστήματος για είσοδο της μορφής r(t) = t θα είναι:
Η αντίστοιχη γραφική παράσταση φαίνεται παρακάτω.

1 1 1 1( ) ( ) 1
1
t
TC t L C s L eTs T
0 t
C(t)
1/T
* Κρουστική απόκριση συστήματος πρώτης τάξης
Η απόκριση του συστήματος για είσοδο της μορφής r(t)=δ(t) θα είναι:
Η καμπύλη της κρουστικής απόκρισης απεικονίζεται παρακάτω.

* Συστήματα δεύτερης τάξης
Ας θεωρήσουμε το δομικό διάγραμμα του συστήματος 2ης τάξης του παρακάτω σχήματος
R(s) Υ(s)
2
2 22
n
n ns s
2
2 2
( )( )
( ) 2
n
n n
Y sT s
R s s sΗ συνάρτηση μεταφοράς είναι της
μορφής:
Η χαρακτηριστική εξίσωση του συστήματος είναι:
Οι πόλοι της G(s) είναι οι ρίζες της χαρακτηριστικής εξίσωσης
δηλαδή: ή
2 22 0n ns s
2
1,2 1n ns 2
1,2 1n ns j

0 1 1,2 n ns j
0 1,2 ns j
1,2 ns
11,2 n ns
212 1
1
21d n
Υπό-απόσβεση Χωρίς απόσβεση Κρίσιμη απόσβεση Υπέρ-απόσβεση όπου Ο συντελεστής ζ ονομάζεται συντελεστής απόσβεσης του συστήματος (damping ratio) και το ωn κυκλική ιδιοσυχνότητα (natural frequency ) χωρίς απόσβεση.

ΑΠΟΚΡΙΣΗ ΜΟΝΑΔΙΑΙΑΣ ΒΑΘΜΙΔΑΣ
1)Υπό-απόσβεση (0 < ζ < 1)
Στην περίπτωση όπου 0 < ζ < 1 η χαρακτηριστική εξίσωση έχει δυο
ρίζες συζυγείς μιγαδικές.
Η χρονική απόκριση είναι της μορφής:
όπου: ή και
Ο συντελεστής ωd ονομάζεται κυκλική ιδιοσυχνότητα του
συστήματος με απόσβεση (damped natural frequency).
nn2,1 js
)tsin(e
1)s(C)t(c d
tn1-L
1tan1cos
n2
nd 1

Η χρονική απόκριση είναι της μορφής:
1 2 ns s
( ) 1 (1 )nt
nc t e t
2) Κρίσιμη απόσβεση (ζ = 1)
Στην περίπτωση που ζ=l η χαρακτηριστική εξίσωση έχει δύο
ρίζες πραγματικές ίδιες με τιμή:

Η χρονική απόκριση είναι της μορφής:
2
1,2 1n ns
2 2( ) 1 cosh( 1 ) sinh( 1 )nt
n nc t e t t
3) Υπέρ-απόσβεση (ζ > 1)
Στην περίπτωση όπου ζ > 1 η χαρακτηριστική εξίσωση έχει δύο
ρίζες πραγματικές με τιμές:

4) Μηδενική απόσβεση (ζ = 0)
Στην περίπτωση όπου ζ = 0 η χαρακτηριστική εξίσωση έχει δύο
ρίζες συζυγείς φανταστικές:
Η χρονική απόκριση είναι της μορφής:
1,2 ns j
( ) 1 cos nc t t

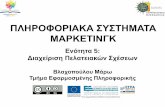
Χρονική απόκριση συστήματος δεύτερης τάξης σε διέγερση μοναδιαίας
βηματικής συνάρτησης για διάφορες τιμές του συντελεστή απόσβεσης ζ. Ο
οριζόντιος άξονας είναι σε radians και αναπαριστά το χρόνο
πολλαπλασιασμένο με την φυσική συχνότητα ωn του συστήματος.

Χαρακτηριστικά μεγέθη χρονικής απόκρισης ευσταθούς
συστήματος που διεγείρεται με σήμα μοναδιαίας βηματικής
συνάρτησης
Στα πρακτικά συστήματα ελέγχου η μεταβατική απόκριση εμφανίζει
αποσβενόμενες ταλαντώσεις, προτού φθάσει στη μόνιμη κατάσταση
(παρακάτω σχήμα).

11tanr
d
t
p
d
t
•Χρόνος καθυστέρησης td (delay time): Ο χρόνος που χρειάζεται
για να φθάσει η απόκριση, για πρώτη φορά, το 50% της τελικής
της τιμής.
•Χρόνος ανύψωσης tr (rise time): Ο χρόνος που χρειάζεται για
να ανέλθει η απόκριση από το 10% στο 90% της τελικής της
τιμής και δίνεται από τη σχέση:
•Χρόνος κορυφής tp (peak time): Ο χρόνος που χρειάζεται για να
φθάσει η απόκριση στην πρώτη κορυφή της καμπύλης και είναι:

4s
n
t
3s
n
t
100%m f
p
f
c cM
c
lim ( )ft
c c t
Χρόνος αποκατάστασης ts (settling time): Ο χρόνος που χρειάζεται
για να φθάσει και να παραμείνει η καμπύλη απόκρισης ανάμεσα
στο
2% ή
5% της τελικής τιμής.
Με κριτήριο ζώνης το 2% είναι:
Με κριτήριο ζώνης το 5% είναι:
Μέγιστη υπερύψωση Mp (maximum percent overshoot): Η διαφορά
της μέγιστης τιμής cm και της τελικής τιμής έστω cf της c(t). Το
ποσοστό υπερύψωσης ορίζεται:
όπου:
Μέγιστη τιμή της απόκρισης cm: Η τιμή της απόκρισης στην
πρώτη κορυφή της καμπύλης είναι:
1mc e

1. Σύστημα με συνάρτηση μεταφοράς συνδέεται σε
σειρά με ελεγκτή με συνάρτηση μεταφοράς . Να
υπολογιστεί η συνάρτηση μεταφοράς του συστήματος κλειστού
βρόγχου με μοναδιαία αρνητική ανάδραση, καθώς επίσης τα μεγέθη
αυτής: ωd, ζ, ωn, υπερύψωση ν%.
1
1( )
25G s
s s
2( ) 625G s
Παραδείγματα
R(s)
-
G2(s) G1(s) Y(s)
1 2
1 2
2
2
2 2 2
1 625625
25 25( ) ( )( ) 625
1 25 625( ) 1 ( ) ( ) ( ) 25 6251 625 1
25 25
( ) 6252 25 & 625
( ) 25 625 2
n
n n
n n
s s s sG s G sY s
s sR s G s G s H s s s
s s s s
Y s
R s s s s s

2 2
2
2 2
3.14 0.51 1,811 0.5
625 25
2 25 2 25 25 2 1 0.5
1 25 1 0.5 25 1 0.25 25 0.75 25 0,866 21.65
. 100 100 100 16.36%
n n
n
d n
M O e e e

2. Σύστημα κλειστού βρόγχου με μοναδιαία αρνητική ανάδραση
έχει συνάρτηση μεταφοράς και συνδέεται με αντισταθμιστή
σειράς με συνάρτηση μεταφοράς . Να εκλεγεί κατάλληλη
τιμή για την παράμετρο α, έτσι ώστε το ποσοστό υπερύψωσης της
αντίστοιχης βηματικής απόκρισης να είναι 5%.
4( )
2G s
s
( )C
s aG s
s
R(s)
-
G(s) GC(s) Y(s)
2
22
2 2 2
442( ) ( )( ) 2
4 2 4( ) 1 ( ) ( ) ( )1 1
2 2
4 4
2 4 6 4
4( )2 6 1 & 4 2
( ) 6 4 2
C
C
nn n
n n
s as as sG s G sY s s s
s a s s s aR s G s G s H s
s s s s
s a s a
s s s a s s a
s aY sa
R s s s a s s

2
2 2
1
3.14 3.14
1 1
2
2
222
2 2 2 2
2
2
. 100 5%
0,05 0,05
3,142,9957 2,9957 1 3,14
1
2,9957 1 3,14
5,9914 1 9,86 5,9914 5,9914 9,86
15,5914 5,9914
0.384 0,619
1 2 0
M O e
e e
2
,619 6 4,846
2 4,846 4 5,87
n n
a a

R(s) +
_
Y(s)
3. Να υπολογιστεί η ΣΜ και η χρονική απόκριση y(t) του ΣΚΒ με μοναδιαία είσοδο ράμπας (r(t)=t).
2
40
3s s
2
2
2
2 2 2
311 12 2
2
40
( ) 40340( ) 3 40
1 13
40 1 40( )
3 40 5 8
( )5 8
Y s s s
R s s s
s s
Y ss s s s s s
KK K KY s
s s s s
2
11 2 220 0
2
12 20 0
2 2 25 5
3 28
40 8 51 40 3
2 1 ! 5 8 405 8
1 40 401
2 2 ! 5 8 5 8
40 40 85
5 8 8 65
408
5 8
lim lim
lim lim
lim lim
lim
s s
s s
s s
s
s sdK s
ds s s s s s
K ss s s s s
K ss s s s s
K ss s s 2
8
40 5
5 104lims s s
5 83 8 5( )
40 65 104
t ty t t e e

2
1( )
12G s
s s( ) , 0CG s k k 4. Για το σύστημα με Σ.Μ. και αναλογικό (Ρ) ελεγκτή σειράς με Σ.Μ.
και μοναδιαία αρνητική ανάδραση.
Α) Να σχεδιαστεί ο Γ.Τ.Ρ. αφού πρώτα σχεδιάσετε το διάγραμμα βαθμίδων.
Β) Να υπολογιστεί η χρονική απόκριση της εξόδου του Σ.Κ.Β., με μοναδιαία βηματική
είσοδο για k=100.
Γ) Να υπολογιστεί ο χρόνος μεγίστου της παραπάνω χρονικής απόκρισης.
2
1( ) ( ) ( ) 1
12 12C
kG s G s H s k
s s s s
R(s) +
-
GC(s) Y(s) G(s) A)
2
2
31 2
12( )
( ) 121 1
12
100 1 100( )
12 6 8 6 8
( )6 8 6 8
k
s sY s k
kR s s s k
s s
Y ss s k s s s j s j
KK KY s
s s j s j
10
26 8
36 8
100 100 1001
6 8 6 8 6 8 6 8 36 64
1006 8
6 8 6 8
100 100 100
6 8 6 8 6 8 6 8 16 128 96
1006 8
6 8 6 8
100
6 8 6
lim
lim
lim
s
s j
s j
K ss s j s j j j
K s js s j s j
j j j j j j
K s js s j s j
j
100 100
8 6 8 6 8 16 128 96j j j j j
B)
6 8 6 8100 100( ) 1
128 96 128 96
j t j ty t e e
j j
2
0
2 2 2
0 0
2
0 0
0
( ) 100
( ) 12 100 2
2 12 (1) & 100 (2)
(2) 10
(1) 2 10 12 0,6
Y s
R s s s s s
2 21 10 1 0,6 10 1 0,36 10 0,64 10 0,8 8d n
3,140,39sec
8p
d
t

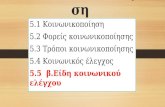
Σχέση μεταξύ της θέσης των πόλων και των μηδενικών στο πεδίο-s και την αντίστοιχη απόκριση στο πεδίο του
χρόνου.
Imaginary Axis
Real Axis
Oscillatory growth
Exponential growth
Oscillatory growth
Expnential Decay
Oscillatory Decay
Oscillatory Decay
Sustained Oscillations
Sustained Oscillations

Όπως φαίνεται στα σχήματα η θέση των πόλων στο μιγαδικό επίπεδο σχετίζεται άμεσα με τη χρονική απόκριση του συστήματος. Στο (a) φαίνεται η θέση των πόλων των μιγαδικό επίπεδο, στο (b) φαίνεται η χρονική απόκριση κατά μήκος του άξονα jω2 του μιγαδικού επιπέδου, στο (c) φαίνεται η χρονική απόκριση κατά μήκος του άξονα jω1 και στο (d) φαίνεται η χρονική απόκριση του συστήματος του οποίου οι πόλοι βρίσκονται πάνω στον αρνητικό ημιάξονα.


Ένα από τα βασικά πρακτικά προβλήματα της επιστήμης των
συστημάτων αυτομάτου ελέγχου είναι η σχεδίαση ενός
συστήματος τέτοιου ώστε, η έξοδός του να "ακολουθεί" την
είσοδό του, όσο γίνεται πιο πιστά.
Τα ασταθή συστήματα δεν μπορούν να μας εξασφαλίσουν μία
τέτοια συμπεριφορά και επομένως δεν είναι χρήσιμα. Γι’αυτό,
κατά τη σχεδίαση ενός συστήματος αυτομάτου ελέγχου,
επιδιώκεται πρώτα και πάνω απ' όλα η εξασφάλιση της
ευστάθειας του συστήματος.
Μετά την εξασφάλιση της ευστάθειας επιδιώκεται η
ικανοποίηση άλλων απαιτήσεων σχεδίασης, όπως η ταχύτητα
και η ακρίβεια απόκρισης, το εύρος ζώνης, το σφάλμα στη
μόνιμη κατάσταση, κ.λπ..
ΕΥΣΤΑΘΕΙΑ

Ένα σύστημα είναι ευσταθές, αν για φραγμένη είσοδο η έξοδος είναι φραγμένη. Η έξοδος ενός ευσταθούς συστήματος
βρίσκεται μέσα σε επιτρεπτά όρια ενώ η έξοδος ενός ασταθούς συστήματος αυξάνει θεωρητικά προς το άπειρο.

Από θεωρητικής πλευράς, η έννοια της ευστάθειας
έχει μελετηθεί σε βάθος και έχουν προταθεί διάφοροι
ορισμοί και κριτήρια ευστάθειας.
Π.χ. για την κατηγορία των γραμμικών μη χρονικά
μεταβαλλόμενων συστημάτων, ισχύει το πολύ γνωστό
γεγονός, ότι η ευστάθεια συνδέεται με τη θέση των
ριζών της χαρακτηριστικής εξίσωσης στο μιγαδικό
επίπεδο.
Στην περίπτωση αυτή, ένα σύστημα είναι ευσταθές αν
όλες οι ρίζες της χαρακτηριστικής εξίσωσης
βρίσκονται στο αριστερό μιγαδικό ημιεπίπεδο. Αν
έστω και μια ρίζα της χαρακτηριστικής εξίσωσης
βρίσκεται στο δεξιό μιγαδικό ημιεπίπεδο, το σύστημα
είναι ασταθές.

Τα γνωστότερα είναι:
1) Το κριτήριο Routh,
2) γεωμετρικού τόπου ριζών (Γ.Τ.Ρ)
3) Bode
4) Nyquist, κ.λ.π.
Υπάρχουν κριτήρια ευστάθειας που μας
βοηθούν να διαπιστώσουμε για ποιες τιμές των
παραμέτρων έχουμε ευστάθεια.

• Γεωμετρικός Τόπος Ριζών
Ο (Γ.Τ.Ρ) είναι μια γραφική απεικόνιση των θέσεων των πόλων (ρίζες της Χ.Ε) του συστήματος κλειστού βρόγχου στο μιγαδικό επίπεδο-s, για όλες τις τιμές της παραμέτρου Κ (κέρδος) του συστήματος.
Είναι γνωστό ότι οι θέσεις των πόλων της συνάρτησης μεταφοράς στο μιγαδικό επίπεδο επηρεάζουν τη μεταβατική απόκριση του συστήματος καθώς και την ευστάθειά του.
Για το σύστημα κλειστού βρόγχου όπως αυτό εικονίζεται στο σχήμα που ακολουθεί ισχύουν οι παρακάτω σχέσεις:
G(s) R (s) C(s)
H(s)
E(s) +
-
Z(s)

Συνάρτηση Μεταφοράς του Συστήματος (Σ.Μ.)
Συνάρτηση Μεταφοράς (Σ.Μ.) του Κλάδου Δράσης
Συνάρτηση Μεταφοράς (Σ.Μ.) του Κλάδου Ανάδρασης
Συνάρτηση Μεταφοράς (Σ.Μ.) Ανοιχτού Βρόγχου
Χαρακτηριστικό Πολυώνυμο
Χαρακτηριστική Εξίσωση
)s(H)s(G1
)s(G
)s(R
)s(C)s(G
)s(G
)s(H
)s(H)s(G
)s(H)s(G1
0)s(H)s(G1

Αν η συνάρτηση μεταφοράς (Σ.Μ) ανοικτού βρόγχου είναι της μορφής:
τότε η Σ.Μ του συστήματος θα είναι:
από την παραπάνω σχέση παρατηρούμε ότι η μεταβολή των τιμών της παραμέτρου Κ επηρεάζει τις τιμές των ριζών της Χ.Ε του συστήματος με αποτέλεσμα τη μετατόπισή τους πάνω στο μιγαδικό επίπεδο. Αυτό μας επιτρέπει να δημιουργήσουμε ένα διάγραμμα πάνω στο μιγαδικό επίπεδο που θα είναι το σύνολο των σημείων που θα είναι ρίζες της Χ.Ε. του συστήματος αν η παράμετρος Κ πάρει όλες τις τιμές από το 0 μέχρι το + .
Το διάγραμμα που προκύπτει όταν το Κ πάρει τιμές μεταξύ του - και του μηδενός ονομάζεται συμπληρωματικός Γ.Τ.Ρ..
)s(D
)s(NK
)ps()ps)(ps(
)zs()zs)(zs(K)s(H)s(G
n21
m21
)s(KN)s(D
)s(D)s(G
)s(D
)s(NK1
)s(G
)s(H)s(G1
)s(G
)s(R
)s(C

Από την Χ.Ε προκύπτουν τα παρακάτω:
Συνθήκη φάσης για το Γ.Τ.Ρ.
Συνθήκη μέτρου για το Γ.Τ.Ρ.
Η παραπάνω σχέση μας επιτρέπει να υπολογίσουμε την τιμή της παραμέτρου Κ πάνω στο διάγραμμα.
1)()(0)()(1 sHsGsHsG
1)s(H)s(G
,...2,1,0,)12()()(( sHsG
1
ps
zs
Kn
1jj
m
1ii

* Κανόνες Προσεγγιστικής Χάραξης του Γ.Τ.Ρ.
1. Οι πόλοι της είναι τα σημεία εκκίνησης του Γ.Τ.Ρ.
2. Τα μηδενικά (zeros) της και το άπειρο όταν m<n είναι τα σημεία λήξης του Γ.Τ.Ρ.
3. Ο αριθμός των κλάδων του τόπου ριζών ισούται με το max(m,n) όπου m είναι το πλήθος των μηδενικών και n είναι το πλήθος των πόλων της
4. Ο Γ.Τ.Ρ. είναι συμμετρικός ως προς τον άξονα των πραγματικών αριθμών.
5. Το σημείο τομής των ασύμπτωτων ευθειών με τον άξονα των πραγματικών αριθμών δίδεται από την σχέση.
όπου = το άθροισμα των τιμών των πόλων της
όπου = το άθροισμα των τιμών των μηδενικών της
mn
zpm
1jj
n
1ii
n
1iip
m
1jjz
)s(H)s(G
)s(H)s(G
)s(H)s(G

6 Οι γωνίες που σχηματίζουν οι ασύμπτωτες με τον πραγματικό άξονα δίνεται από τη σχέση.
όπου ((n-m)-1) είναι η τελευταία τιμή του μ.
7. Ένα τμήμα του άξονα των πραγματικών αριθμών μπορεί να είναι τμήμα του Γ.Τ.Ρ. αν το πλήθος των πόλων και των μηδενικών που βρίσκονται δεξιά του τμήματος είναι περιττό. (για K 0).
8. Τα σημεία αποχωρισμού και άφιξης των κλάδων από και προς τον οριζόντιο άξονα ονομάζονται σημεία θλάσης του Γ.Τ.Ρ. και υπολογίζονται από τις παρακάτω σχέσεις:
ή
κάθε ρίζα της παραπάνω εξίσωσης αποτελεί ένα δεκτό σημείο θλάσης αν είναι ταυτόχρονα και ρίζα της Χ.Ε. του συστήματος για κάποια τιμή του Κ.
0)1),...((2,1,0,)12(
Kmnmn
)s(N
)s(DK
0ds
dK0)s(D)s(N)s(N)s(D ''

9. Οι γωνίες αναχώρησης του Γ.Τ.Ρ. από μιγαδικό πόλο ή άφιξης σε μιγαδικό μηδενικό υπολογίζονται από τη σχέση:
όπου:
= το αλγεβρικό άθροισμα των γωνιών που σχηματίζουν οι
πόλοι ως προς τον αναφερόμενο μιγαδικό πόλο (μηδενικό).
= το αλγεβρικό άθροισμα των γωνιών που σχηματίζουν
τα μηδενικά ως προς τον αναφερόμενο μιγαδικό πόλο (μηδενικό).
Τα σημεία τομής του Γ.Τ.Ρ. με τον άξονα των φανταστικών αριθμών είναι τα σημεία όπου το σύστημα μεταπίπτει από την ευστάθεια στην αστάθεια.
Οι τιμές του Κ και του ω για τα σημεία αυτά, ονομάζονται κρίσιμο κέρδος (Kcr ) και κρίσιμη συχνότητα (ωcr ) αντίστοιχα.
n
1i
m
1jzpd ji
)12(
n
1ipi
m
1jz j

* Κριτήριο Routh
Το κριτήριο ευστάθειας Routh, προσδιορίζει τον αριθμό των πόλων της συνάρτησης μεταφοράς κλειστού βρόχου που βρίσκονται στο δεξιό μιγαδικό ημιεπίπεδο-s και δίνει απάντηση στο ερώτημα: «είναι το σύστημα ευσταθές;», χωρίς να προσδιορίζει τη σχετική ευστάθεια του συστήματος όπως συμβαίνει με άλλα κριτήρια όπως του Γ.Τ.Ρ. που είδαμε προηγουμένως.
Ας θεωρήσουμε ότι η Χ.Ε της συνάρτησης μεταφοράς του συστήματος έχει τη παρακάτω γενική μορφή:
όπου όλοι οι συντελεστές στο R και είναι 0
Εφ' όσον όλοι οι συντελεστές είναι ΟΜΟΣΗΜΟΙ, σχηματίζουμε τον
παρακάτω πίνακα του Routh.
0)s(H)s(G1
0011
1 asasasa nn
nn
011 ,,,, aaaa nn

Όπου οι όροι,
υπολογίζονται ως εξής:
.....
.....
........
........
........
....
....
...
...
10
11
213
212
75311
642
nn
nn
nnnn
nnnn
nnnnn
nnnnn
ffs
ees
cccs
bbbs
aaaas
aaaas
........,,....., 11 nnnnn eccbb
1
321
n
nnnnn
a
aaaab
1
5411
n
nnnnn
a
aaaab
1
7612
n
nnnnn
a
aaaab
n
nnnnn
b
ababc 113
n
nnnnn
b
ababc 125
1
Πίνακας Routh
Σύμφωνα με το ΚΡΙΤΗΡΙΟ του Routh για να είναι ευσταθές ένα σύστημα πρέπει οι όροι της πρώτης στήλης του πίνακα Routh να είναι ΟΜΟΣΗΜΟΙ.
Ο αριθμός των ριζών της Χ.Ε που βρίσκονται στο δεξιό ημιεπίπεδο s ισούται με τον αριθμό αλλαγών του πρόσημου των συντελεστών της πρώτης στήλης του πίνακα Routh.

Ειδικές περιπτώσεις για την συμπλήρωση του πίνακα Routh
α. Όταν ένας όρος της πρώτης στήλης είναι μηδέν, ενώ οι υπόλοιποι όροι της
σειράς είναι διάφοροι του μηδενός ή δεν υπάρχουν, τότε, αντικαθίσταται ο
μηδενικός όρος, από ένα πολύ μικρό αριθμό ομόσημο με τους προηγούμενους
της πρώτης στήλης, και συνεχίζεται η ανάπτυξη του πίνακα.
β. Όταν όλοι οι όροι μίας σειράς του πίνακα Routh είναι μηδενικοί, ο πίνακας
συμπληρώνεται με την τοποθέτηση, αντί των μηδενικών όρων με τους όρους
της παραγωγισμένης βοηθητικής εξίσωσης της αμέσως προηγούμενης σειράς.
γ. Όταν τουλάχιστον δύο σειρές έχουν μηδενικούς όρους, τότε το σύστημα
είναι ασταθές και το χαρακτηριστικό πολυώνυμο έχει δύο αντίθετους
πραγματικούς πόλους με πολλαπλότητα 2.
δ. Για την εύρεση της κρίσιμης (οριακής) τιμής του Κ για ευστάθεια αρκεί να
μηδενιστεί ο όρος της σειράς s1 και να λυθεί η εξίσωση ως προς Κ=Κcr.
ε. Για την εύρεση της οριακής συχνότητας ταλαντώσεων του συστήματος αρκεί
να λυθεί η βοηθητική εξίσωση της σειράς s2 ως προς ω=ωcr. Αυτή θα έχει τη
μορφή: όπου οι συντελεστές της σειράς s2 και όπου k θα
τεθεί η τιμή Κcr που βρέθηκε .
012
nn s 1, nn

Παράδειγμα 1 :Κριτήριο Routh-Hurwitz Παράδειγμα 1 :Κριτήριο Routh-Hurwitz
Χαρακτηριστική εξίσωση 0201256 2345 sssss
Πίνακας Routh
s
s
s
s
s
s
5
4
3
2
1 12413
0
1 6 12 0
1 5 20 0
1 8 0
13 20 0
0
20 0
:
:
:
:
:
:
0
poles
2 πόλοι στο δεξιό ημιεπίπεδο

Παράδειγμα 2 :Κριτήριο Routh-Hurwitz Παράδειγμα 2 :Κριτήριο Routh-Hurwitz
Χαρακτηριστική εξίσωση s s s s s5 4 3 25 5 12 10 0
Πίνακας Routh
s
s
s
s c
s d
s
5
4
3
21
11
0
1 5 12 0
1 5 10 0
2 0
10 0
0
10 0
:
:
:
:
:
:
c
dc
c
1
11
1
5 2 2
2 102
2 πόλοι στο δεξιό ημιεπίπεδο

Να σχεδιαστεί ο Γ.Τ.Ρ του εικονιζόμενου συστήματος κλειστού βρόγχου.
1 2
KG s H s
s s s
3 πόλοι:p1 = 0; p2 = -1; p3 = -2
Κανένα μηδενικό.
ΒΗΜΑ 1Ο :ΑΦΟΥ ΒΡΩ ΤΟΥΣ ΠΟΛΟΥΣ ΚΑΙ ΤΑ ΜΗΔΕΝΙΚΑ ΤΗΣ G(s)H(s), ΤΑ ΣΧΕΔΙΑΖΩ ΠΑΝΩ
ΣΤΟ ΕΠΙΠΕΔΟ-S ΣΥΜΒΟΛΙΖΟΝΤΑΣ ΤΟΥΣ ΠΟΛΟΥΣ ΜΕ (x) ΚΑΙ ΤΑ ΜΗΔΕΝΙΚΑ ΜΕ (ο).

ΒΗΜΑ 2ο : Ένα τμήμα του άξονα των πραγματικών αριθμών
μπορεί να είναι κλάδος του Γ.Τ.Ρ. αν το πλήθος των πόλων και των
μηδενικών που βρίσκονται δεξιά του κλάδου είναι περιττό. (για K 0).

1 2 3 0 1 21
3 0 3a
p p p
2 1 180o
ln m
0,1, 2, ( 1)n m
i i
n ma
p z
n m
0
0
0
0
0
1
0
0
2
180 2 0 160
3 0
180 2 1 1180
3 0
180 2 2 1300
3 0
ΒΗΜΑ 3o: Υπολογισμός των ασύμπτωτων

4226057741
0263
21
2
.s,.s
ss
sssK
sss)s(H)s(G
K
23
211
23
0ds
dK
ΒΗΜΑ 4o: Υπολογισμός σημείου αποχώρησης

+ K K G(s) G(s)
-
C(s) R(s)
Για ποιές τιμές του K το σύστημα είναι ευσταθές ?
εάν +
K K G(s) G(s) -
C(s) R(s)
+ K K
-
C(s) R(s)
21
1
sssΧαρακτηριστική εξίσωση
ΒΗΜΑ 5o: Υπολογισμός Κcr και ωcr με το κριτήριο Routh-Hurwitz

Χαρακτηριστική εξίσωση
+ K K
-
C(s) R(s)
21
1
sss
. 1 ( ) 0.... ... ... ... ( ) 11 2
KX E G s H s ή G s H s
s s s
s
s K
s
s K
K
3
2
1 63
0
1 2 0
3 0
0
0
:
:
:
:
Πίνακας Routh 023 23 Ksss
2 2
2
3 0 3( ) 0
3 6 0 2
s K j K
Σύστημα ευσταθές για: 0 < K < 6

2
2

Γ.Τ.Ρ: ΠΑΡΑΔΕΙΓΜΑ 1
86
12 ss
sR sCK

Γ.Τ.Ρ: ΠΑΡΑΔΕΙΓΜΑ 2
86
12 ss
ssR sCK

Γ.Τ.Ρ: ΠΑΡΑΔΕΙΓΜΑ 3
86
512 ss
sssR sCK

Γ.Τ.Ρ: ΠΑΡΑΔΕΙΓΜΑ 4
23
542 ss
sssR sCK

Γ.Τ.Ρ: ΠΑΡΑΔΕΙΓΜΑ 5
23
542 sss
sssR sCK

Controllers - Eλεγκτές Στις επόμενες ενότητες θα εξετασθούν οι βιομηχανικοί ελεγκτές ή ελεγκτές
τριών όρων PID, (με τους διάφορους συνδυασμούς τους όπως: P, PI ή PID).
Η προτίμηση των ελεγκτών PID οφείλεται εν μέρει στην σθεναρή και εν
μέρει στην απλή τους λειτουργία, κάτω από πολλές και διαφορετικές
συνθήκες.
Η υλοποίηση ενός τέτοιου ελεγκτή βασίζεται στον προσδιορισμό των
τριών παραμέτρων Kp, Ki, Kd
Ο Ελεγκτής παράγει το σήμα διέγερσης για το Ελεγχόμενο σύστημα

dt
tdeKdtteKteKtu d
t
ip
)()()()(
0
Η έξοδος του ελεγκτή PID σχηματίζεται από το άθροισμα τριών όρων,
•ενός όρου Ρ (Proportional) αναλόγου του σφάλματος,
•ενός όρου Ι (Integral) αναλόγου του ολοκληρώματος του σφάλματος και
•ενός όρου D (Derivative ) αναλόγου της παραγώγου του σφάλματος.
Σήμα εξόδου του ελεγκτή στο πεδίο του χρόνου
Σήμα εξόδου του ελεγκτή στο πεδίο του Laplace )()( sEsKs
KKsU d
ip

Ορισμοί
dt
tdeTdtte
TteK
dt
tdeKdtteKteKtu
d
t
i
p
d
t
ip
)()(
1)(
)()()()(
0
0
,p d
i d
i i
K Kό T T
K K
proportional gain
Αναλογικό κέρδος
integral gain
Ολοκληρωτικό κέρδος
derivative gain
Διαφορικό κέρδος
derivative time constant
σταθερά χρόνου διαφόρισης
integral time constant
σταθερά χρόνου ολοκλήρωσης

Επιρροή των όρων P, I και D στην απόκριση του
συστήματος
Ο αναλογικός όρος P βοηθά στη βελτίωση της συμπεριφοράς του συστήματος τόσο στην μεταβατική όσο και στην μόνιμη κατάσταση, αλλά αδυνατεί να εξαλείψει πλήρως το μόνιμο σφάλμα. Δεν μπορεί να αντεπεξέλθει ικανοποιητικά σε όλους τους τύπους των συστημάτων και των εξωτερικών διαταραχών, γι' αυτό (όπου απαιτείται) συνδυάζεται μαζί με άλλους όρους.
Ο ολοκληρωτικός όρος Ι χρησιμοποιείται σε συστήματα που παρουσιάζουν σφάλμα στη μόνιμη κατάσταση, αφού για όσο χρόνο υπάρχει σφάλμα, η έξοδος του ελεγκτή, λόγω του ολοκληρώματος αυξάνεται με αποτέλεσμα την εξάλειψη του σφάλματος, αλλά αυτό γίνεται σε βάρος της ταχύτητας απόκρισης και της ευστάθειας του συστήματος.
Ο διαφορικός όρος D αυξάνει την ευστάθεια του συστήματος και βελτιώνει τη συμπεριφορά του κατά τη μεταβατική κατάσταση, αλλά λόγω της επιβολής στην πράξη περιορισμού της εξόδου του ελεγκτή δεν χρησιμοποιείται ποτέ από μόνος του.

Επιρροή των όρων P, I και D στην απόκριση του συστήματος
κλειστού βρόγχου
Rise time
Χρόνος ανόδου
ή ανύψωσης (tr)
Maximum
overshoot
Μέγιστη
υπερύψωση
(ym)
Settling time
Χρόνος
αποκατάστασης
(ts)
Steady-state
error
Μόνιμο
σφάλμα
P ΜΕΙΩΣΗ ΑΥΞΗΣΗ Μικρή αλλαγή ΜΕΙΩΣΗ
I ΜΕΙΩΣΗ ΑΥΞΗΣΗ ΑΥΞΗΣΗ ΕΞΑΛΕΙΨΗ
D Μικρή αλλαγή ΜΕΙΩΣΗ ΜΕΙΩΣΗ Μικρή αλλαγή
Να σημειωθεί ότι η συσχέτιση στον πίνακα μπορεί να μην είναι ακριβής, διότι οι
όροι Κp, Ki και Kd είναι αλληλοεξαρτώμενοι.

Παράδειγμα εφαρμογής PID ελεγκτή
fkxxbxm
)()()()(2 sFskXsbsXsXms
Έστω ότι έχουμε το εικονιζόμενο μηχανικό σύστημα.
Η μαθηματική περιγραφή είναι:
Μετασχηματίζοντας σε Laplace, παίρνουμε:
Η συνάρτηση μεταφοράς είναι:
kbsmssF
sX2
1
)(
)(

Έστω
Με αυτές τις τιμές η συνάρτηση που προκύπτει είναι:
Σκοπός μας είναι να δούμε, πως κάθε ένας από τους όρους συμβάλει στο να έχουμε:
Μικρό χρόνο ανόδου
Ελάχιστη υπερύψωση
Μηδενικό μόνιμο σφάλμα
1 , 10 , 20 / , 1N s
m kg b k N m f Nm
2010
1
)(
)(2 sssF
sX
,p i dK K K

Η συνάρτηση μεταφοράς ανοιχτού βρόγχου είναι:
2010
1
)(
)(2 sssF
sX
Η τιμή της εξόδου στη μόνιμη κατάσταση είναι:
20
1
)(
)()(lim)(lim)(lim
00 sF
sXssFssXtxx
sstss
Διάγραμμα ανοιχτού συστήματος χωρίς ελεγκτή

ΒΗΜΑΤΙΚΗ ΑΠΟΚΡΙΣΗ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΝΟΙΧΤΟΥ ΒΡΟΓΧΟΥ
• 0.05=1/20 είναι η τελική
τιμή της εξόδου X(t) σε
μοναδιαία βηματική διέγερση.
• Αυτό σημαίνει ότι το μόνιμο
σφάλμα στο ανοιχτό σύστημα
είναι 95%.
• Ο χρόνος αποκατάστασης
Τς είναι περίπου 1,5 sec.

P Controller - Αναλογικός Ελεγκτής
Η ΣΜ του συστήματος κλειστού βρόγχου είναι:
2
2
2
( ) 10 20
( ) 10 (20 )1
10 20
p
p
p p
K
KX s s sKF s s s K
s s

Επιλέγοντας
Από τη γραφική παράσταση
της απόκρισης φαίνεται ότι ο
αναλογικός ελεγκτής,
μειώνει το χρόνο ανόδου
και το μόνιμο σφάλμα
αυξάνει την υπερύψωση και
επιφέρει Μικρή αλλαγή στο
χρόνο αποκατάστασης.
300pK

PI Controller Αναλογικός-Ολοκληρωτικός Ελεγκτής
Η ΣΜ του συστήματος κλειστού βρόγχου είναι:
ip
ip
ip
ip
KsKss
KsK
ss
sKKss
sKK
sF
sX
)20(10
2010
/1
2010
/
)(
)(23
2
2

Επιλέγοντας
Από τη γραφική παράσταση της
απόκρισης φαίνεται ότι ο
αναλογικός ολοκληρωτικός
ελεγκτής, μειώνει το χρόνο
ανόδου και μηδενίζει το μόνιμο
σφάλμα.
70,30 ip KK
PI Controller Αναλογικός-Ολοκληρωτικός Ελεγκτής

PD Controller Αναλογικός-Διαφορικός Ελεγκτής
Η ΣΜ του συστήματος κλειστού βρόγχου είναι:
)20()10(
20101
2010
)(
)(2
2
2
pd
dp
dp
dp
KsKs
sKK
ss
sKKss
sKK
sF
sX

PD Controller Αναλογικός-Διαφορικός Ελεγκτής
Επιλέγοντας
Από τη γραφική παράσταση της
απόκρισης φαίνεται ότι ο
Αναλογικός-Διαφορικός ελεγκτής,
μειώνει την υπερύψωση και το
χρόνο αποκατάστασης ενώ έχει
μικρή επιρροή στο χρόνο
ανύψωσης και στο μόνιμο
σφάλμα
10,300 dp KK

PID Controller Αναλογικός-Ολοκληρωτικός-Διαφορικός Ελεγκτής
Η ΣΜ του συστήματος κλειστού βρόγχου είναι:
ipd
ipd
idp
idp
KsKsKs
KsKsK
ss
sKsKKss
sKsKK
sF
sX
)20()10(
2010
/1
2010
/
)(
)(23
2
2
2

PID Controller Αναλογικός-Ολοκληρωτικός-Διαφορικός Ελεγκτής
350, 300, 5500p i dK K K
ΒΕΛΤΙΣΤΗ ΑΠΟΚΡΙΣΗ

PD P
PI PID

Επίδραση
του Αναλογικού,
Ολοκληρωτικού και
Διαφορικού κέρδους στη
Δυναμική Απόκριση του
Συστήματος

Αναλογικός Ελεγκτής
)()()()( teKtusUKsE pp

Μεταβολή του κέρδους σε Αναλογικό
Ελεγκτή
Αύξηση του κέρδους:
Βελτιώνει την μεταβατική
και την μόνιμη απόκριση
Μειώνει το μόνιμο
σφάλμα.
Μειώνει την Ευστάθεια !

Αναλογικός Ελεγκτής
με μεγάλο κέρδος

Ολοκληρωτικός Ελεγκτής
Το Ολοκλήρωμα του σφάλματος με σταθερό κέρδος
επιφέρει:
Αύξηση του τύπου του συστήματος κατά 1
Εξάλειψη του μονίμου σφάλματος σε βηματική διέγερση
Αύξηση της υπερύψωσης και των ταλαντώσεων
dtteKtusUs
KsE
t
ii
0
)()()()(

Αύξηση του κέρδους σε Αναλογικό-Ολοκληρωτικό
Ελεγκτή (PI)
Αύξηση του κέρδους :
Δεν βελτιώνει τη μόνιμη
απόκριση
Αυξάνει ελαφρώς το
χρόνο αποκατάστασης
Αύξηση της υπερύψωσης
και των ταλαντώσεων

Διαφορικός Ελεγκτής
Διαφόριση του σφάλματος με σταθερό κέρδος
γρήγορη ανίχνευση των μεταβολών της εξόδου
μείωση υπερύψωσης και ταλαντώσεων
δεν επηρεάζει τη μόνιμη απόκριση
βελτίωση της μεταβατικής απόκρισης
dt
tdeKtusUsKsE dd
)()()()(

Αύξηση του κέρδους σε Αναλογικό-Διαφορικό
Ελεγκτή (PD)
Αύξηση του κέρδους :
βελτίωση της
μεταβατικής απόκρισης
Μείωση της κορυφής και
του χρόνου ανόδου
Αύξηση της
υπερύψωσης και του
χρόνου αποκατάστασης!

Μεταβολές κέρδους σε Ελεγκτή
PID

ΣΥΜΠΕΡΑΣΜΑΤΑ Αυξάνοντας το αναλογικό κέρδος μειώνεται το
μόνιμο σφάλμα, αν όμως το αυξήσουμε πολύ το
σύστημα αποσταθεροποιείται.
Ο Ολοκληρωτικός έλεγχος επιφέρει ισχυρή
μείωση του μόνιμου σφάλματος, αλλά συχνά
μειώνει την ευστάθεια του συστήματος.
Ο Διαφορικός έλεγχος αυξάνει την απόσβεση και
βελτιώνει την ευστάθεια χωρίς να επηρεάζει το
μόνιμο σφάλμα

Περιγραφή PID Ελεγκτή
Ο βασικός τύπος PID ελεγκτή περιγράφεται
από τις παρακάτω σχέσεις:
( ) ( )
1( ) 1 ( )
ip d
p d
i
KU s K K s E s
s
or U s K s T s E sT

ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΟΙ ΛΟΓΙΚΟΙ
ΕΛΕΓΚΤΕΣ
Programmable Logic Controllers
PLCs

1. Ορισμός του PLC.
2. Εφαρμογές του PLC.
3. Αρχιτεκτονική δομή του PLC.
4. Πλεονεκτήματα της χρήσης του
PLC στις βιομηχανικές
εγκαταστάσεις ελέγχου έναντι των
συμβατικών εξαρτημάτων.
5. Τρόποι προγραμματισμού του PLC.

Ορισμός του PLC
Είναι προγραμματιζόμενη ηλεκτρονική
συσκευή (βιομηχανικός Η/Υ), που δέχεται
σήματα εισόδου από διακόπτες και
αισθητήρες. Αξιολογεί τα σήματα εισόδου
σύμφωνα με ένα αποθηκευμένο
πρόγραμμα και παράγει σήματα εξόδου
για τον έλεγχο μηχανών και γενικά
διαδικασιών παραγωγής.

Εφαρμογές του PLC.
Τα PLCs χρησιμοποιούνται για την αυτοματοποίηση των διαφόρων μηχανημάτων σε βιομηχανικές εγκαταστάσεις.
Έχουν αντικαταστήσει πολλά ηλεκτρομηχανικά και ηλεκτρονικά μέσα (ηλεκτρονόμους, χρονοδιακόπτες, μετρητές, κ.λ.π), που χρησιμοποιούνται για τη λειτουργία και τον έλεγχο της λειτουργίας των μηχανημάτων.
Με τη χρήση των PLCs το ηλεκτρικό κύκλωμα ελέγχου των μηχανών απλοποιείται, γίνεται πιο έξυπνο, πιο ευέλικτο σε μετατροπές, πιο αξιόπιστο στη λειτουργία.
Η καλωδίωση του κυκλώματος ελέγχου μπαίνει όλη σχεδόν στο πρόγραμμα του PLC.

Αρχιτεκτονική δομή του PLC.

Συνδεσµολογία PLC

Πλεονεκτήματα της χρήσης του PLC στις βιομηχανικές
εγκαταστάσεις ελέγχου έναντι των συμβατικών
εξαρτημάτων
•Το κόστος των PLCs επιτρέπει σήμερα και στο πιο απλό μηχάνημα, που
έχει κάποιον ηλεκτρικό έλεγχο να το χρησιμοποιεί.
•Το PLC διαθέτει τέτοιες δυνατότητες, που μπορεί να χρησιμοποιηθεί για
οποιοδήποτε μηχάνημα.
•Ο προγραμματισμός του είναι σχετικά εύκολος. Μπορούμε να αλλάξουμε
τη διαδικασία στη λειτουργία ενός μηχανήματος, που ελέγχεται από PLC
διαφοροποιώντας το πρόγραμμα του και δεν είναι ανάγκη να αλλάξουμε
ηλεκτρικά μέσα και καλωδίωση.
•Η χρήση του PLC στο κύκλωμα ελέγχου φέρνει και πιο χαμηλή
κατανάλωση ηλεκτρικής ενέργειας.
•Γενικά η παραγωγικότητα των μηχανημάτων με τη χρήση του PLC
αυξάνεται, οι βλάβες και τα σταματήματα μειώνονται, η αυτοματοποίηση
γίνεται εύκολη.

Τρόποι προγραμματισμού του
PLC.
1. Με κατάλογο εντολών (lnstruction Iist)
Ο τρόπος αυτός είναι παρόμοιος με τον προγραμματισμό των προσωπικών ηλεκτρονικών υπολογιστών με τη γλώσσα προγραμματισμού BASIC.
2. Με λειτουργικό διάγραμμα (Function bIock diagram)
Ο τρόπος αυτός χρησιμοποιεί τα λογικά σύμβολα των λογικών πυλών της άλγεβρας του Βοοll με τα οποία σχεδιάζουμε λογικά κυκλώματα.
3. Με διάγραμμα επαφών (Ladder Diagram Program)
Η μέθοδος αυτή χρησιμοποιεί τα αμερικάνικα σύμβολα των επαφών.